

Лабораторная работа №2
ДИНАМИКА ЦИФРОВЫХ РЕКУРСИВНЫХ СИСТЕМ ПЕРВОГО ПОРЯДКА ПРИ ПОСТОЯННОМ ВНЕШНЕМ ВОЗДЕЙСТВИИ
Цель работы: изучение переходных и стационарных режимов, возникающих в линейных и нелинейных цифровых рекурсивных системах первого порядка при постоянном внешнем воздействии.
Теория
Цифровые системы (цепи) первого порядка широко используются в современных системах передачи информации. На их базе реализуются фильтры нижних (ФНЧ) и верхних (ФВЧ) частот. В качестве носителя информации часто используется прямоугольный импульс. Поэтому практически важными являются вопросы исследования колебательных режимов при постоянном внешнем воздействии. Полагаем, что эффекты квантования отсутствуют, цепь устойчива, т.е. параметр (коэффициент) ее b1 <1.
1. Линейная система
Структурная схема линейной рекурсивной цифровой системы первого порядка представлена на рис.1.
A |
|
|
|
|
|
y (n+1) |
|
|
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z-1 |
|
b1 |
|
y1(n) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.1 |
|
|
|
21
Колебания в ней при постоянном внешнем воздействии A описываются линейным разностным уравнением
|
y1(n+1)=b1 y1(n)+A, |
|
|
(1) |
|||||||
решением которого является функция |
|
|
|
|
|
||||||
y |
(n) =[ y |
(0) - |
|
|
A |
]b n + |
|
|
A |
. |
(2) |
|
|
|
|
|
|
||||||
1 |
1 |
|
1 |
- b1 |
1 |
1 |
- b1 |
|
|||
|
|
|
|
|
|||||||
Поскольку b1 <1, в установившемся режиме получим
Y = lim y (n) = |
|
|
A |
. |
(3) |
||
|
|
|
|||||
1 |
n→∞ |
1 |
1 |
−b1 |
|
||
|
|
|
|
||||
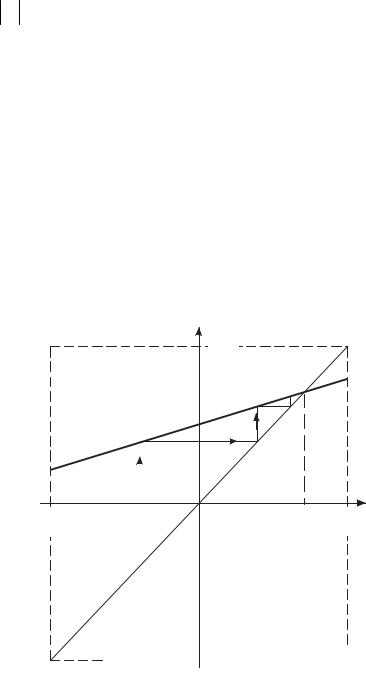
Введем последовательность y2(n)=y1(n+1). Разностному уравнению (1) соответствует функция последования
y2=b1y1+A.
Выражение для Y1 может быть получено и как формула для абсциссы точки пересечения графиков функции последования и биссектрисы
первого и третьего координатных углов (рис. 2). y2
1
|
|
|
|
A |
|
|
|
+ |
|
|
|
y |
|
|
|
b |
1 |
|
|
|
|
|||
= |
|
|
|
|
y |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 y1(0)
A
y1
0 |
Y1 1 |
y1 y= 2







 -1
-1 








Рис. 2
22

На практике переходный режим от включения считается оконченным при n=N, если выполняется условие
y1(N)-Y1 =0.1 Y1 .
Воспользовавшись (2), определим длительность процесса включения при y1(0)=0, как ближайшее сверху целое число к величине
N ≈ - 2.3 . |
|
1 |
ln b1 |
|
|
2. Нелинейная система
Полагаем, что нелинейность системы обусловлена нелинейностью характеристики сумматора. Структурная схема нелинейной рекурсивной системы первого порядка представлена на рис. 3.
A |
|
|
|
|
|
|
|
y (n+1) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
f(ϕ) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z-1
b1 y1(n)
Рис.3
Колебания в такой системе при постоянном внешнем воздействии описываются нелинейным разностным уравнением
y1(n+1)=f (b1 y1(n)+A),
где функция f(ϕ) описывает характеристику сумматора. Такому уравнению соответствует функция последования
y2=f (b1y1+A).
23

Рассмотрим процессы в системах с двумя видами характеристики сумматора: с насыщением и пилообразной. Полагаем, что в фильтре используются арифметика с фиксированной запятой и числа, выровненные слева.
Взависимости от значений b1 и А в системе возможен линейный
инелинейный режим.
Линейный режим
Пусть b1>0 (цепь является ФНЧ). Пример диаграммы Ламерея для А>0 показан на рис. 2. Согласно (3) условием линейного режима является
1-Ab1 ≤1,
откуда следует
b1 -1 ≤ A ≤1 - b1 . |
(4) |
Эта область показана заштрихованной на рис. 4.
A |
1 |
b1 |
1 |
-1 |
Рис. 4 |
Пусть b1<0 (цепь является ФВЧ). Пример диаграммы Ламерея при А>0 показан на рис. 5.
24

|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
b |
y |
+A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
-1 |
|
|
|
|
|
|
y1(0) |
|
|
|
|
|
Y1 |
1 |
|
||||||||||||||||||
y1 y= 2
y |
|
= |
|
2 |
- |
|
y |
|
1 |








 -1
-1 







Рис. 5
В линейном режиме модуль абсциссы точки пересечения функции последования и биссектрисы второго и четвертого координатных углов меньше или равен 1. Отсюда следует
−A ≤1, 1+b1
т.е.
-1-b1 ≤ A ≤1 + b1 . |
(5) |
И эта область показана заштрихованной на рис. 4.
При выборе b1 и А за пределами показанной на рис.4 области в колебательной системе возникает нелинейный режим. Характер поведения системы в этом случае зависит от вида характеристики сумматора.
Характеристика сумматора с насыщением
Характеристика сумматора с насыщением выражается функцией
ϕ, |
|
ϕ |
|
<1, |
|
|
|||
f(ϕ ) = |
|
|
|
|
|
|
|
|
|
sign ϕ, |
|
ϕ |
≥1. |
|
|
|
|
|
|
25

График ее показан на рис. 6.
|
f(ϕ) |
|
|
1 |
|
-1 |
0 |
1 |
|
|
ϕ |
|
-1 |
|
|
Рис. 6 |
|
Характер поведения системы в этом случае зависит от знака b1. Пусть b1>0. Пример диаграммы и лестницы Ламерея при А>0
показан на рис. 7.
|
|
y2 |
1 |
|
|
|
|
|
|
|
|
) |
|
|
|
|
A |
|
|
|
|
+ |
|
|
|
|
y |
|
|
|
|
1 |
|
|
|
b |
|
|
|
|
( |
1 |
|
|
|
f |
|
|
|
|
= |
|
|
|
|
y |
|
|
y1 |
|
y1(0) |
0 |
||
-1 |
1 |
|||
|
y1 |
|
|
|
|
= |
|
|
|
y2 |
|
|
|
|
|
|
|
-1 |
|
|
|
Рис. 7 |
|
|
После включения постоянного воздействия в цепи существует линейный режим до достижения y2 =1. Длительность этого режима находится из (2) и при y1(0)=0 выражается функцией
26

|
|
|
- |
signA |
|
|
|
|
ln 1 |
|
|
||||
N |
= |
|
|
Y1 |
|
|
−1, |
|
ln b1 |
|
|||||
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где [•] - целая часть числа, величина Y1 находится из (3). Далее имеет
место режим с насыщением, а полная длительность переходного процесса на 2 единицы больше, чем величина N1.
Пусть b1<0. Пример диаграммы и лестницы Ламерея при А>0 показан на рис. 8. При этом отображение имеет единственную неподвижную точку с координатой Y1, определяемой из (3). Здесь начальное состояние y1(0) соответствует режиму с насыщением, а при
n ≥1 система |
переходит в линейный режим, описываемый |
||
уравнением (1). |
Такое сочетание |
режимов |
имеет место при |
y1 (0) < (1− A) / b1 . |
В других случаях |
в системе |
существует только |
линейный режим. |
|
|
|
Если А<0, а |
y1 (0) > −(1+ A) / b1 , то также существуют режимы с |
||
насыщением и линейный (при n ≥1).
|
|
y2 |
|
y |
|
1 |
|
|
|
||
=f |
|
|
|
( |
|
|
|
b y |
|||
|
|
+ |
|
1 |
|
A |
|
1 |
) |
||
|
|||
|
|
||
y1(0)
-1
y1 y= 2
|
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1 |
|
||
1 |
|||
y |
|
= |
|
2 |
- |
|
y |
|
1 |








 -1
-1 







Рис. 8
27

|
|
|
Пилообразная характеристика сумматора |
|
|
||||||
|
Пилообразная характеристика сумматора выражается функцией |
||||||||||
|
|
|
|
|
f(ϕ ) =(ϕ +1)(mod 2) -1. |
|
|
||||
График ее показан на рис. 9. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
f(ϕ) |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
-3 |
-2 |
|
-1 |
|
0 |
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
Рис. 9 |
|
|
|
|
|
В зависимости от знака коэффициента b1 в системе изменяется |
|||||||||||
характер движений. |
|
|
|
|
|
|
|
|
|||
|
Пусть |
b1 > 0 . В |
отличие |
от системы, |
имеющей |
сумматор с |
|||||
насыщением, в системе с пилообразной характеристикой сумматора в |
|||||||||||
нелинейном режиме возникают периодические колебания. Установим |
|||||||||||
связь между периодом таких колебаний T , параметром b1 и |
|||||||||||
величиной внешнего воздействия A . |
|
|
|
|
|||||||
|
Рассмотрим процесс |
возникновения колебаний |
с периодом |
||||||||
T = 2. Диаграмма Ламерея при b1 = 0,6, A = 0,9 изображена на рис. 10. |
|||||||||||
Функция последования терпит разрыв в точке y1 = (1− A) |
b1 =1/ 6. |
||||||||||
|
Пусть |
система |
стартует |
из |
точки |
y1 (0)=Y1 (0). |
Тогда |
||||
y1 (1)=Y1 (1)= b1Y1 (0)+ A . |
Согласно |
правилу |
отображения |
имеем |
|||||||
y2 (2)= b1 y1 (1)+ A −2 . |
|
|
|
|
|
|
|
|
|||
|
При T = 2 для обеспечения инвариантности точек y1 (0) |
и y1 (1) |
|||||||||
должно |
|
выполняться |
равенство |
y1 (2)= y1 (0), |
т.е. |
||||||
y |
(0)= b2 y (0)+b A + A −2. Откуда следует |
|
|
|
|||||||
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
28 |
|
|
|
|
|
|
|
|
|
|
|

y1 (0)=Y1 (0)= A(1+−b12)−2 .
1 b1
Соответственно
Y1 (1)= A(1+−b1 )2−2b1 .
1 b1
Например, при b1 = 0,6 , A = 0,9 имеем Y1 (0)= −0,875, (см. рис. 10).
|
|
y2 |
|
|
|
|
1 |
|
|
|
A |
0,8 |
|
y1 |
|
+ |
|
= |
|
|
y |
|
y |
2 |
b |
|
|
|
|
|
1 |
|
|
|
= |
|
|
|
|
y |
1 |
|
|
|
2 |
|
0,4 |
|
|
|
|
|
|
|
(6)
(7)
Y1 (1)= 0,375
|
|
|
Y1(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
-1 |
-0,8 |
|
-0 |
|
,4 |
|
0 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,4 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,8 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Y1(1) |
|
y1 |
|
||
|
0,4 0,8 1
|
|
|
|
|
|
2 |
||
|
|
|
|
|
|
- |
||
|
|
|
|
A |
||||
|
|
+ |
|
|
|
|||
|
|
y |
|
|
|
|||
|
b |
|
|
|
||||
|
|
1 |
|
|
|
|||
= |
|
|
|
|
|
|
||
y |
1 |
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10
Исследуем устойчивость цикла периода T = 2. С помощью обобщенной теоремы Кенигса определим устойчивость двукратной неподвижной (инвариантной) точки Y1 (0). В данном случае имеем
f |
N |
= f |
2 |
= b2 y +b A + A −2 , |
|||||
а производная |
|
|
1 1 |
1 |
|
||||
|
|
dfN |
|
df2 |
|
|
|||
|
|
|
= |
= b2 |
<1. |
||||
|
|
|
|
|
|||||
|
|
|
dx |
|
|
dy1 |
1 |
|
|
|
|
|
|
|
|
|
|||
Следовательно, точка Y1 (0), а вместе с ней и точка Y1 (1) (а вместе с ними и цикл периода T = 2) устойчивые.
29

Выражения (6) и (7) позволяют определить область параметров (b1, A), соответствующую периоду T = 2. При A > 0 нижняя граница
этой области находится из условия
Y1 (0)≥ −1, |
(8) |
а верхняя граница – из условия
Y1 (1)<1. |
(9) |
Из выражений (6) и (8) получим
A ≥ 1+b12 , 1+b1
а из (7) и (9) имеем выражение для верхней границы
A < 1+2b1 −b12 . 1+b1
На рис. 11 заштрихованной показана область, соответствующая колебаниям с периодом T = 2. Вследствие специфики характеристики сумматора верхняя граница этой области задается прямой A =1.
A |
|
|
|
|
|
0.9 |
|
|
|
|
|
0.8 |
|
|
|
|
|
0.7 |
|
|
|
|
|
0.60 |
A=1-b1 |
|
|
|
|
0.2 |
0.4 |
0.6 |
0.8 |
b1 |
|
|
|
Рис. 11 |
|
|
|
30
Рассмотрим колебательный процесс с периодом T = 3. Диаграмма Ламерея при b1 = 0,6, A = 0,7 приведена на рис. 12.
y2 
|
A |
|
+ |
|
y |
b |
|
|
1 |
= |
|
y |
1 |
2 |
|
1 |
0,8 |
0,4
 Y1(0)
Y1(0)
-1 -0,8 -0,4
y1 y= 2
Y1(1) Y1(2)  y1
y1
0 |
0,4 |
0,8 |
1 |
-0,4
-0,8








 -1
-1 


|
|
|
|
2 |
||
|
|
|
||||
|
|
- |
||||
|
|
+A |
|
|
||
|
|
|
||||
|
|
y |
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
=b |
|
|
|
|
|
y |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
Рис. 12
Пусть система стартует из точки y1 (0)=Y1 (0). Тогда y1 (1)=Y1 (1)= b1Y1 (0)+ A , y1 (2)=Y1 (2)= b1 y1 (1)+ A . Согласно правилу
отображений имеем y1 (3)= b1 y1 (2)+ A −2. |
|
|
|
||||||||
|
При T =3 для обеспечения инвариантности точек y1 (0), |
y1 (1) и |
|||||||||
y1 (2) |
|
должно |
выполняться |
равенство |
y1 (3)= y1 (0), |
т.е. |
|||||
y (0)= b3 y (0)+b2 A +b A + A −2. Откуда следует |
|
|
|
||||||||
1 |
1 |
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
y |
(0)=Y (0)= |
A(b12 +b1 +1)−2 |
. |
(10) |
|||
|
|
|
|
|
|
||||||
|
|
|
|
1 |
1 |
|
1−b3 |
|
|
|
|
Соответственно |
|
|
|
|
1 |
|
|
|
|
||
|
|
|
A(b12 +b1 +1)−2b1 |
|
|
|
|
||||
|
|
|
|
|
Y (1)= |
. |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
1−b3 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Поскольку y (2) |
= b2 y |
(0)+b A + A , получим |
|
|
|
||||||
|
|
1 |
1 |
1 |
1 |
|
|
|
|
|
|
31

Y |
(2)= |
A(b12 +b1 +1)−2b12 |
. |
(11) |
|
||||
1 |
|
1−b3 |
|
|
|
|
1 |
|
|
Например, при b1 = 0,6 , |
A = 0,7 имеем Y1 (0)= −0,801, |
Y1 (1)= 0, 219, |
||
Y1 (2)= 0,832. |
|
|
|
|
По аналогии со случаем T = 2 нетрудно определить устойчивость трехкратной неподвижной (инвариантной) точки Y1 (0).
В данном случае имеем
f |
N |
= f |
3 |
= b3 y +b2 A +b A + A −2, |
||||
|
|
1 1 |
1 |
1 |
||||
а производная |
|
|
|
dfN |
|
df3 |
|
|
|
|
|
|
= |
= b3 |
<1. |
||
|
|
|
|
|
|
|||
|
|
|
|
dx |
1 |
|
||
|
|
|
|
dy1 |
|
|||
Следовательно, согласно обобщенной теореме Кенигса, точка Y1 (0), а вместе с ней и точка Y1 (1) и Y1 (2) (а вместе с ними и цикл периода
T = 3) устойчивые.
С помощью выражений (8) и (9) определим область параметров (b1, A), соответствующую T = 3. Из (8) и (10) для нижней границы
получим
A ≥ |
1+b3 |
|
|
1+b2 +b , |
|||
|
1 |
|
|
|
1 |
1 |
|
из (9) и (11) имеем выражение для верхней границы этой области
A < 1+ 2b12 −b13 . 1+b12 +b1
На рис. 13 заштрихованной показана область, соответствующая колебаниям с периодом T = 3.
32

A |
|
|
|
|
|
0.9 |
|
|
|
|
|
0.8 |
|
|
|
|
|
0.7 |
|
|
|
|
|
0.6 |
A=1-b1 |
0.4 |
0.6 |
0.8 |
b1 |
0 |
0.2 |
||||
|
|
Рис. 13 |
|
|
|
Распространим установленные закономерности на случай произвольного периода T . При этом должно выполняться равенство
Y1 (T )=Y1 (0),
T −2
где Y1 (T )= b1Y1 (T −1)+ A −2 ,Y1 (T −1)= b1T −1Y1 (0)+ A∑b1i .
Отсюда получим |
|
|
|
|
|
i=0 |
|
|
|
T −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y (0)= |
A∑b1i −2 |
, |
|
(12) |
||
|
i=0 |
|
|
||||
|
1−bT |
|
|||||
|
1 |
|
|
|
|
||
|
|
|
T −1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
Y |
(T −1)= |
|
A∑b1i −2b1T −1 |
. |
(13) |
||
|
i=0 |
|
|
||||
|
1−bT |
|
|||||
1 |
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
Эти выражения позволяют |
определить область |
параметров |
|||||
(b1, A), соответствующую периоду T . |
При A > 0 нижняя граница |
||||||
этой области задается условием (8), а верхняя граница – условием |
|||||||
|
Y1 (T −1)<1. |
|
|
(14) |
|||
33

Из (8) и (14) для нижней границы получим |
|
|
|
|
|
|||||||
|
|
|
|
|
A ≥ |
1+bT |
|
|
|
|
(15) |
|
|
|
|
|
|
T −1 |
1 , |
|
|
|
|
||
|
|
|
|
|
|
∑b1i |
|
|
|
|
|
|
|
|
|
|
|
|
i=0 |
|
|
|
|
|
|
из (13) и (14) имеем выражение для верхней границы этой области |
||||||||||||
|
|
|
|
A < |
1+2bT −1 −bT |
. |
|
|
|
(16) |
||
|
|
|
|
|
1 |
1 |
|
|
|
|||
|
|
|
|
|
T −1 |
|
|
|
|
|||
|
|
|
|
|
|
∑b1i |
|
|
|
|
|
|
|
|
|
|
|
|
i=0 |
|
|
|
|
|
|
На рис. 14а и б заштрихованными изображены рассчитанные по |
||||||||||||
формулам |
(15), |
(16) |
области |
параметров |
для |
T {4; 5} |
||||||
соответственно. |
|
|
|
|
|
|
|
|
|
|
||
A |
|
|
|
|
|
A |
|
|
|
|
|
|
0.9 |
|
|
|
|
|
0.6 |
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.7 |
|
|
|
|
|
0.5 |
|
|
|
|
|
|
0.6 |
|
|
|
|
|
0.4 |
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
A=1-b1 |
|
|
|
|
|
|
|
|
|
|
||
0.4 0 |
|
|
|
0.30.3 |
A=1-b1 |
|
|
|
||||
0.2 |
0.4 |
0.6 |
0.8 |
b1 |
0.44 |
0.58 |
0.72 |
0.86 b1 |
||||
|
|
а) |
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
Рис. 14 |
|
|
|
|
|
|
|
A < 0 |
Вследствие симметричности характеристики сумматора в случае |
|||||||||||
соответствующие |
области |
располагаются |
симметрично |
|||||||||
относительно оси абсцисс областям, показанным на рис. 11, 13, 14. |
||||||||||||
34

Пусть b1 < 0 . Пример диаграммы Ламерея при A > 0 показан на
рис. 15. В отличие от системы, имеющей сумматор с насыщением (см. рис. 8), в данном случае графики функции последования и
биссектрисы y2 |
= y1 |
пересекаются в |
|
двух точках B и C . Им |
|||||||||
соответствуют простые устойчивые неподвижные точки Y11 и Y12 |
|||||||||||||
отображений, |
определяемых |
|
функциями |
последования |
|||||||||
y2 = f (b1 y1 + A) |
и y2 |
= f (b1 y1 + A −2) |
|
соответственно. При A > 0 |
|||||||||
координаты этих точек выражаются следующим образом: |
|||||||||||||
|
|
Y |
= |
|
|
A |
, Y |
= |
|
A −2 |
. |
|
|
|
|
1 |
−b |
|
|
||||||||
|
|
11 |
|
12 |
|
|
1−b |
|
|||||
В случае A < 0 имеем |
|
|
|
|
1 |
|
|
1 |
|
|
|
||
|
|
|
|
A |
|
|
|
A +2 |
|
|
|||
|
|
Y |
= |
|
|
, Y |
= |
|
. |
|
|||
|
|
1 |
−b |
|
|
|
|||||||
|
|
11 |
|
12 |
|
|
1−b |
|
|||||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
Заметим, что режиму ФВЧ соответствует только точка B . Приведенные на рис. 15 лестницы Ламерея показывают, что координата неподвижной точки зависит от начального условия y1 (0).
|
|
|
|
y2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y= |
|
|
|
|
|
|
|
|
|
A |
2 |
b |
y |
+A |
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
B |
|
|
|
Y12 y1(0) |
|
|
|
|
|
|
y1 |
||
-1 |
|
|
y1(0) |
|
|
|
Y11 |
1 |
||
|
|
|
|
y1 |
|
|
|
y |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
= |
|
|
|
= |
|
||
|
|
|
|
|
|
|
- |
|
||
|
|
|
y |
2 |
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y =b y |
+A-2 |
|
|
-1 |
|
|
|
|
||
|
|
|
|
|
|
|
||||
2 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 15 |
|
|
|
|
||
35