

суперустойчивыми точками B и D . На выходе системы после окончания переходных процессов имеем колебания с периодом T = 2 вида →1 → −1 →.
Определим область значений параметров (b1 , b2 ),
соответствующую данному расположению областей I–III на плоскости состояний. Для точки A выполняется условие (8), а для точки B – условие (11). Этим соотношениям удовлетворяет заштрихованная область на рис. 9б.
5. Свободные колебания с периодами Т = 1 или Т = 2
Пусть b1 = 0, b2 = 3 2 . В этом случае уравнения прямых MN и PG имеют вид соответственно y1 = 2
2 . В этом случае уравнения прямых MN и PG имеют вид соответственно y1 = 2 3 . Расположение областей I-III на плоскости (y1, y2 ) изображено на рис. 10а.
3 . Расположение областей I-III на плоскости (y1, y2 ) изображено на рис. 10а.
Здесь точки A и C принадлежат тем же областям, что и в п. 1.3, и при старте из них система сохраняет начальное состояние. На выходе ее имеем колебание с периодом T = 1 и мгновенными значениями +1 или −1. Точки B и D располагаются в тех же областях, что и в п. 1.4, и при старте из них в системе возникают колебания с периодом T = 2 вида → B → D →.
При старте из других точек областей I–III изображающая точка за конечное число итераций переходит в зависимости от начальных условий в один из углов квадрата ABCD . Поскольку коэффициенты b1 и b2 выбраны за пределами треугольника устойчивости, при старте
из области II изображающая точка удаляется от начала координат и за конечное число итераций переходит в область I или III. Последующий процесс описан выше.
Следовательно, при выбранных коэффициентах b1 и b2
динамический режим характеризуется в зависимости от начальных условий суперустойчивыми состояниями равновесия в точках A или C или двумя суперустойчивыми инвариантными точками B и D . На
выходе системы по окончании переходных процессов устанавливаются колебания соответственно с периодом T = 1 вида T =1(1) или T =1(−1) или с периодом T = 2 вида →1 → −1 →.
Границы областей начальных условий, соответствующих колебаниям с периодами Т = 1 или Т = 2, описаны аналитически в научных публикациях, указанных в списке литературы к данной лабораторной работе.
Определим область значений параметров (b1 , b2 ), соответствующую данному расположению областей I–III
76
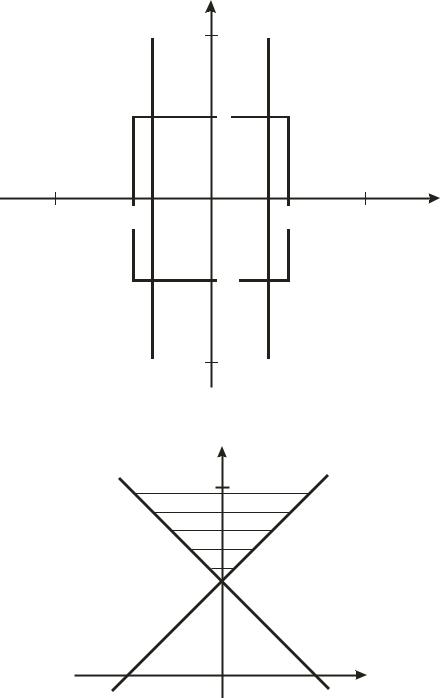
относительно квадрата ABCD на плоскости состояний. Согласно табл. 1 для точки A выполняется условие (10), а для точки B – условие (11). Этим соотношениям удовлетворяет заштрихованная область на рис. 10б.
|
|
y2 |
|
|
|
N |
2 |
G |
|
|
D |
1 |
A |
|
|
|
|
|
|
-2 |
-1 |
0 |
1 |
2 |
I |
|
II |
|
III |
|
-1 |
|
||
|
C |
B |
|
|
|
|
|
||
|
M |
-2 |
P |
|
|
|
|
|
|
|
|
а) |
|
|
|
|
b2 |
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
-1 |
0 |
|
1 |
|
|
|
|
b1 |
|
|
б) |
|
|
|
|
Рис. 10 |
|
|
77

6. Свободные колебания с периодом Т = 4
Пусть b1 = 0 ,b2 = −3 2 . При этом уравнения прямых MN и PG имеют вид y1 = ±2
2 . При этом уравнения прямых MN и PG имеют вид y1 = ±2 3. Расположение областей I–III на плоскости состояний показано на рис. 11а.
3. Расположение областей I–III на плоскости состояний показано на рис. 11а.
|
|
y2 |
|
|
|
G |
2 |
N |
|
|
D |
1 |
A |
|
|
|
|
|
|
-2 |
-1 |
0 |
1 |
2 |
III |
|
II |
|
I |
|
-1 |
|
||
|
C |
B |
|
|
|
|
|
||
|
P |
-2 |
M |
|
|
|
|
|
|
|
|
а) |
|
|
|
|
b2 |
|
|
|
-1 |
0 |
1 |
b1 |
|
|
-1 |
|
|
|
|
-2 |
|
|
|
|
б) |
|
|
|
|
Рис. 11 |
|
|
78
Определим динамические режимы в системе. Пусть изображающая точка стартует из точки A , тогда
y1 (0)=1y2 (0)=1.
Поскольку эта точка принадлежит области I, воспользовавшись (3), получим
y1 (1)=1y2 (1)= −1.
Изображающая точка переместилась в точку B и осталась в области I, значит,
y1 (2)= −1y2 (2)= −1.
Изображающая точка оказалась в точкеC , расположенной в области III, поэтому согласно (5) имеем
y1 (3)= −1y2 (3)=1.
Изображающая точка перешла в точку D и осталась в области III, следовательно,
y1 (4)=1 = y1 (0)y2 (4)=1 = y2 (0).
Таким образом, изображающая точка снова оказалась в точке A . Далее процесс повторяется. Это колебательный процесс с периодом
T = 4 вида → A → B →C → D →.
При старте из других точек, расположенных в областях I и III, изображающая точка за конечное число итераций переходит в зависимости от начальных условий в один из углов квадрата ABCD . Далее устанавливаются колебания с периодом T = 4.
Поскольку параметры системы b1 и b2 выбраны за пределами
треугольника устойчивости, при старте из области II изображающая точка удаляется от начала координат и за конечное число шагов переходит в зависимости от начального состояния в область I или III.
79