

5.5. Коэффициент полезного действия механизмов
При установившемся движении и отношение абсолютной величины работы полезных сопротивлений к работе движущих сил за один полный цикл установившегося движения механизма называется коэффициентом полезного действия механизма
![]() 1
(5.28)
1
(5.28)
Наряду
с
![]() пользуются понятием коэффициента потерь
.
пользуются понятием коэффициента потерь
.
![]() (5.29)
(5.29)
Тогда коэффициент полезного действия равен
![]() (5.30)
(5.30)
Определение общего КПД при
последовательном соединении механизмов
производится в соответствии со схемой.
Пусть энергия от двигателя М передается
к рабочему органу РО последовательно
соединенными механизмами 1, 2,.., m
(рис. 5.4 а), КПД которых
![]()
Мощность на выходе первого
механизма
![]() ,
второго
,
второго
![]() и т.д. Мощность на выходе m-го
механизма (равная мощности Рр
на рабочем органе) равна
и т.д. Мощность на выходе m-го
механизма (равная мощности Рр
на рабочем органе) равна
![]() .
(5.31)
.
(5.31)

Рис. 5.4. Структурные схемы с последовательным (а) и
параллельным соединением (б) механизмов
Общий КПД при последовательном соединении механизмов равен
![]() .
(5.32)
.
(5.32)
Схема параллельного соединения механизмов показана на рис. 5.4 б. Общий КПД для этого случая равен
![]() (5.33)
(5.33)
![]() ,
,
где Pp - суммарная мощность всех рабочих органов;
Pg – мощность двигателя.
Каждый составляющий систему механизм передает лишь определенную долю энергии двигателя, которую можно учесть с помощью коэффициентов
![]() ,
,
![]() ,
,
![]()
![]()
Рабочие органы потребляют мощность
![]() ,
,![]() ,
,
![]()
Подставив
![]() в формулу (5.25) получим
в формулу (5.25) получим
![]() .
(5.34)
.
(5.34)
Коэффициент полезного действия при параллельном соединении механизмов равен сумме произведений доли мощности ответвляемой в данный канал на коэффициент полезного действия этого канала.
Контрольные вопросы
Какие механические характеристики имеют электродвигатели постоянного и переменного тока?
Объясните и запишите уравнение движения механизма в дифференциальной форме.
От чего зависит электромеханическая постоянная привода?
Запишите уравнение движения механизма в интеграль-
ной форме.
От чего зависит трение в кинематических парах?
Как определяется коэффициент полезного действия механизма?
От чего зависит коэффициент полезного действия при
последовательном соединении механизмов?
Как определяется коэффициент полезного действия при
параллельном соединении механизмов?
Охарактеризуйте три стадии движения механизма.
Как определяется работа движущих сил при установив-
шемся движении?
6. Деформации и напряжения деталей
6.1. Деформация деталей, виды деформаций
Важными
механическими характеристиками деталей
являются понятия деформации и напряжения.
Деформацией тела называется изменение
его первоначальных размеров и формы,
возникающее под действием внешних вил.
На рис. 6.1 а показан стержень, растянутый
силой F
и его продольная деформация – удлинение
![]() .
.
Если
деформация после снятия нагрузки
исчезает и тело полностью восстанавливает
свою первоначальную форму и размеры
(рис. 6.1 б), то она называется упругой,
Если после снятия нагрузки исчезает не
вся деформация, то оставшаяся часть
![]() называется остаточной (рис. 6.1 в).
называется остаточной (рис. 6.1 в).
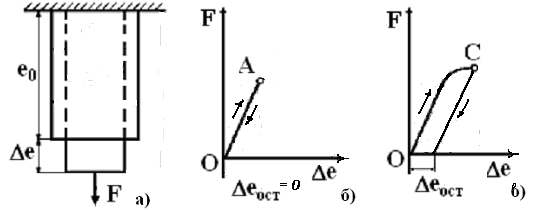
Рис. 6.1. Деформации тела под действием силы
Прочностью детали называется ее свойство выдерживать определенные нагрузки без каких либо повреждений. Жесткость характеризует сопротивляемость детали деформации. Принято различать следующие виды деформаций тела: осевое растяжение и сжатие, сдвиг, кручение и изгиб. Перечисленные виды деформаций называются простыми. Однако многие детали механизмов РЭС работают под действием различных силовых нагрузок и могут подвергаться одновременно нескольким деформациям: изгибу и растяжению (сжатию), изгибу и кручению /8-11/ и т. д. Подобное сочетание нескольких деформаций называется сложной деформацией.