

4. Эффекты квантования в цифровых фильтрах
4.1. Постановка задачи
До сих пор анализ основывался на математической теории линейных разностных уравнений с постоянными коэффициентами. Таким образом, мы молчаливо предполагали, что используемые при составлении уравнений постоянные и переменные параметры являются непрерывными, т. е. что они могут принимать любое значение. Реальные цифровые фильтры имеют дискретные параметры, так как длина слова в любом цифровом приборе конечна. Введение такой дискретизации параметров в уравнения фильтров превращает их в нелинейные соотношения, которые, за исключением нескольких очень простых случаев, трудно, а может быть и невозможно решить точно.
Но когда величина ступени квантования мала по сравнению со значениями сигналов и параметров, теория становится значительно проще и позволяет получить много полезных результатов, которые поддаются экспериментальной проверке. Данная глава посвящена в основном разработке приближенной модели, основанной на относительно малых ошибках квантования, для случая вычислений с фиксированной запятой.
Для иллюстрации рассмотрим простое уравнение
![]() (4.1)
(4.1)
Величина К в уравнении (4.1) является константой, заранее записанной в регистр памяти вычислительной машины. Таким образом, К может принимать только определенные дискретные значения и в общем случае может только приближаться к выбранной величине. Нечто вроде такого же эффекта встречается при проектировании аналоговых фильтров: в результате проектирования определенного фильтра значение расчетной индуктивности может оказаться равным, например, 10,2976 гн, но после намотки катушки и точного измерения индуктивности она может оказаться равной 10,331 гн. Так как невозможно добиться ни точных значений индуктивностей, ни точных значений К, то возникает задача поиска таких реализаций фильтра, которые были бы менее чувствительны к ошибкам этих фиксированных параметров .
Квантование входного сигнала х(пТ) в (4.1) вызывает качественно отличающийся эффект. Сигнал на входе цифрового фильтра можно рассматривать квантованным или неквантованным в зависимости от ситуации.
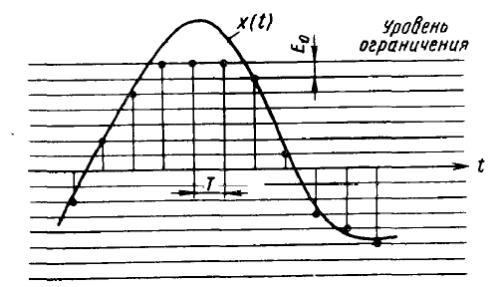
Рис. 4.1. Линейное квантование аналогового сигнала
Если входной сигнал по своей природе дискретен, то ошибки квантования отсутствуют. В подавляющем большинстве практических случаев входные сигналы по своей природе непрерывны, и перед цифровой обработкой необходимо выполнить преобразование аналог - цифра. Таким образом, основным источником ошибок является это преобразование. Преобразователи аналог — цифра в настоящее время делаются с точностью преобразования до 15 двоичных разрядов. На рис. 4.1 показано действие преобразователя аналог — цифра, имеющего 15 уровней с постоянной разностью между уровнями, равной Е0.
Преобразователь аналог - цифра на рис. 4.1 эффективно квантует сигнал. Можно различать несколько видов квантования. Квантование, изображенное на рис. 4.1, будем называть округлением, при нем сигнал аппроксимируется ближайшим уровнем квантования. Аппроксимацию сигнала с помощью ближайшего снизу уровня квантования (она эквивалентна округлению сигнала, уменьшенного на половину ступени квантования) будем называть усечением (truncation).
Вид квантования, который будем называть усечением с учетом знака, подобен простому усечению при положительных сигналах, а при отрицательных сигналах он означает аппроксимацию с помощью уровня квантования, ближайшего сверху. Полагаем, что ошибка е(пТ) вызывается отсчетами с равномерным распределением. Для случая округления предполагается распределение, показанное на рис. 4.2,а. Для усечения ожидаемое распределение показано на рис. 4.2,б. Для усечения с учетом знака ожидаемое распределение показано на рис. 4.2,б или в в зависимости от того, положителен или отрицателен сигнал.
Если флюктуации сигнала таковы, что при переходе от одного отсчета к следующему может быть пройдено много уровней квантования, то есть основание полагать, что ошибка е(пТ) в некоторый момент отсчета будет статистически независимой относительно е(mТ)—ошибки в любой другой момент отсчета (Это допущение справедливо для округления. Для усечения ошибка имеет постоянную составляющую.

Рис. 4.2. Плотность вероятности ошибки квантования при округлении и усечении
Для усечения с учетом знака ошибка сильно коррелирована с сигналом). Легко дать противоречащий пример (в частности, когда сигнал является постоянным), однако Беннет показал, что сделанное допущение справедливо почти для всех встречающихся на практике сигналов. В теоретических построениях настоящей главы требуется несколько более слабое условие, а именно, чтобы шум отсчетов был некоррелирован.
Приведенные ошибки квантования, каждая со своей плотностью вероятности, показанной на рис. 4.2, дают тот очевидный эффект, что на начальный аналоговый сигнал накладывается шум. Таким образом, входной сигнал в (4.1) можно выразить как х(пТ)=x0(пТ)+е(пТ), где x0(пТ) можно считать входным сигналом без шума и е(пТ)—аддитивным шумом. Из рис. 4.2 можно быстро вычислить дисперсию шума,
![]() (4.2)
(4.2)
для случая округления или усечения.
Поведение линейной дискретной системы, такой, как (4,1), при наличии аддитивного шума можно легко вычислить прямыми методами, однако прежде введем третий, и возможно наиболее интересный, источник ошибок квантования, а именно ошибку, вызванную квантованием результатов умножений, необходимых для выполнения итераций. Результаты умножения К на y(пТ—Т) в (4.1) должны быть квантованы. Если К и у(пТ—Т) содержат каждый ν двоичных разрядов, то произведение их будет содержать 2ν двоичных разрядов. Если длина этого произведения в двоичных разрядах не уменьшается, то при каждой последующей итерации она будет возрастать на ν двоичных разрядов.
Отсюда видно, что округление неизбежно. Его влияние на фильтр не так легко ощутить, как влияние аддитивного шума от аналогоцифрового преобразования аналогового входного сигнала, и, в действительности, оно сильно зависит и от того, как именно выполнено квантование, и от конкретной реализации цифрового фильтра. Если, однако, предположить, что эти ошибки округления в различных итерациях не зависят друг от друга, то это ведет к модели, в которой источники шума подключаются к различным точкам цифровой цепи, а не просто добавляются к входному сигналу. Плотность вероятности шума, который вводится за счет этого эффекта, снова иллюстрируется на рис. 4.2,а,б или в в зависимости от конкретных используемых типов квантования. Обсудив три основных источника ошибки в цифровом фильтре, разработаем в такой степени, насколько это возможно, теоретические модели, которые могут позволить предсказывать величину ошибки. Затем подробно изучим несколько конкретных цифровых фильтров и сравним различные реализации для того, чтобы посмотреть, какая из них наименее чувствительна к этим ошибкам. Некоторые результаты были проверены экспериментально, чтобы убедиться в правильности предполагаемых моделей. Основное значение этих результатов заключается в более эффективной реализации требуемого фильтра. В конце этой главы помещено несколько разделов, посвященных теории статистической оценки измерений шума, они полезны в качестве вспомогательного материала для экспериментальной проверки.