

1.3. Конструкция учебных лабораторных стендов
Лабораторный стенд «Кран башенный» (рис. 3) предназначен для знакомства с общим устройством башенного крана. Лабораторный макет является упрощенной копией башенного крана КБ-100.

Рис. 3 . Лабораторный макет башенного крана КБ-100
Реальный кран (рис. 4) имеет поворотную трубчатую башню 1 и наклоняемую трубчатую стрел 2. Стрела в плане имеет треугольную форму. Оголовок 3 башни тоже в трубчатом исполнении. Башня шарнирно закреплена на поворотной платформе 4 и удерживается в вертикальном положении шпренгельной системой с раскосами 5. Поворотная платформа через опорно-поворотное устройство 6 шарикового типа опирается на ходовую раму 7. Ходовая рама с помощью флюгерных балок опирается на четыре ходовые тележки 8, из которых две являются ведущими. На поворотной платформе размещены грузоподъемная 9 и стрелоподъемная 10 лебедки, механизм поворота крана 11, контргруз 12. Расчал 13 стрелы состоит из двух ветвей с уравнительным блоком 14. Распорная стойка 15 также трубчатая и в плане имеет трапециевидную форму. Грузоподъемный полиспаст 16 имеет двухкратную запасовку, стрелоподъемный полиспаст 17 – четырехкратную. Одна из ветвей грузоподъемного полиспаста закреплена на барабане стрелоподъемной лебедки так, что при наматывании стрелоподъемного каната грузоподъемный канат разматывается. Это позволяет автоматически обеспечить горизонтальное перемещение груза при увеличении угла наклона стрелы с целью изменения вылета груза, так как одновременно происходит соответствующее опускание груза. Подъем крановщика в кабину 18 осуществляется по лестнице, расположенной внутри трубчатой башни.

Рис. 4. Схема башенного крана
Лабораторный стенд «Кран козловой» (рис. 5) выполнен как однобалочный двухконсольный мост с двухстоечными опорами. Главная балка 1 имеет две жестко прикрепленных опоры 2 и две шарнирно прикрепленных опоры 3. Опоры имеют по низу стяжки 4 и опираются на ходовые тележки 5 для передвижения по наземному рельсовому пути 6. Мост выполнена из трубы с прикрепленным снизу монорельсом 7, по которому перемещается подвесная тележка 8 с грузоподъемным механизмом 9. Грузовая тележка перемещается по монорельсу с помощью канатной тяги 10, огибающей обводные блоки 11. Тяговая лебедка 12 установлена на площадке, расположенной наверху главной балки. Управление механизмами крана осуществляется с выносного пульта 13. Подача электроэнергии к механизмам осуществляется по гибкому кабелю 14.

Рис. 5. Лабораторный макет козлового крана
Лабораторный стенд «Кран-балка» (рис. 6) позволяет получить представление об устройстве однобалочного мостового крана. Балка 1 двутаврового сечения опирается на концевые балки 2 из угловых профилей. Горизонтальная жесткость моста обеспечивается стержнями 3. Каждая концевая балка имеет по две двухколесные ходовые тележки. Тележки 4 имеют привод с асинхронными двигателями 5; тележки 6 – не приводные. Мост размещен на надземном рельсовом пути 7, выполненном из швеллеров. На нижнем поясе балки 1 моста установлена подвесная электроталь 8 с цепным тяговым органом для подъема крюка. Управление кран-балкой осуществляется с подвесного шестикнопочного пульта 9 через магнитные пускатели 10. Ограничение передвижения моста по рельсовому пути осуществляется конечными выключателями 11 при их контакте с выключающими линейками, установленными на рельсовом пути для ограничения зоны передвижения моста. Ограничение высоты подъема крюка осуществляется рычагом 12, который отключает двигатель грузоподъемного механизма. Ограничение передвижения электротали по балке моста обеспечивают конечные выключатели 13 при надавливании на них рычагов 14, расположенных на корпусе тележки электротали. Электропитание кран-балке подается по гибкому кабелю.


Рис. 6. Общий вид и эскиз кран-балки
Лабораторный стенд «Кран-штабелер» (рис. 7) выполнен на базе двухбалочного мостового крана. Главные балки 1 моста выполнены из двутаврового профиля, концевые балки 2 – из угловых профилей. Каждая концевая балка опирается на два ходовых колеса. Ведущие ходовые колеса 3 на каждой балке приводятся в движение тихоходным приводным валом 4 от центрального привода 5. По главным балкам может перемещаться с помощью канатной тяги грузовая тележка 6 опорного типа, приводимая в движение тяговой лебедкой 7. На грузовой тележке в опорно-поворотном устройстве 8 закреплена вертикальная трубчатая колонна 9 с продольным пазом. Колонна может поворачиваться относительно вертикальной оси электроприводом. На колонне установлена подвижная каретка 10 с рычажным грузозахватным устройством 11. Перемещение грузозахватного устройства по колонне осуществляется расположенным внутри колонны винтовым устройством, приводимым в движение электроприводом, установленным на грузовой тележке. Привод захватывающих рычагов осуществляется отдельным электроприводом, закрытым кожухом 12. Усилие захвата рычагов гарантируется предварительным натяжением пружин. При достижении заданной величины усилия захвата на рычагах привод рычагов отключается специальным выключателем. Управление краном осуществляется с подвесного десятикнопочного пульта 13.

Рис. 7. Общий вид крана-штабелера
Лабораторный макет «Кран кабельный» позволяет получить представление о принципиальном устройстве и работе кабельного крана. Схема макета показана на рис. 8.

Рис. 8. Схема макета кабельного крана
Действующий макет устроен следующим образом. Один конец несущего каната 1 крана закреплен постоянно на колонне 2, а другой его конец натянут грузом 3 через роликовую опору 4, закрепленную на колонне 5. На несущий канат опирается с помощью роликов 6 грузовая каретка 7. Еще одна пара роликов 8 служит для проводки грузоподъемного каната 9. Грузоподъемный канат одним концом закреплен на колонне 2. После проводки через грузовую каретку, грузоподъемный блок 10 и обводной блок 11 на второй колонне другой конец каната закрепляется на барабане 12 грузоподъемной лебедки (рис. 9).
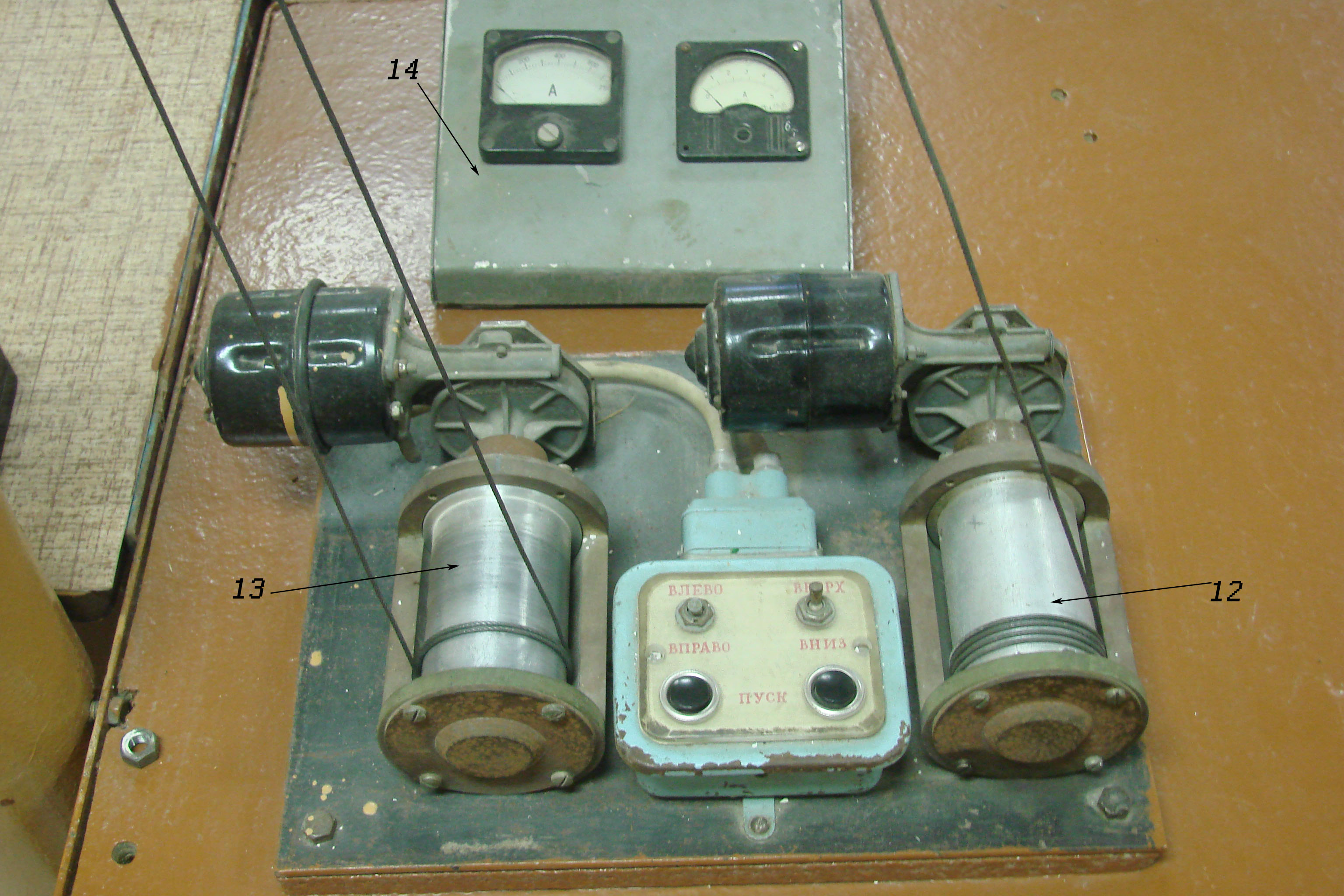
Рис. 9. Общий вид приводной станции макета кабельного крана
Перемещение грузовой каретки по несущему канату осуществляется тяговой лебедкой 13 с помощью тягового каната 14. Тяговый канат охватывает барабан тяговой лебедки несколькими витками и после проводки через обводные блоки прикреплен одним концами непосредственно к грузовой каретке, а другим - через динамометрическую скобу 15 (рис. 10). Усилие в тяговом канате замеряют с помощью динамометрической скобы индикатором 16 часового типа. Деформация динамометрической скобы, равная 0,01 мм, соответствует действующему усилию в тяговом канате 2,5 Н.
Лебедки имеют привод на постоянном токе напряжением 12 В. Потребляемую лебедками мощность контролируют с помощью вольтметра и амперметра измерительного блока 14 (рис.9).

Рис. 10. Установка динамометрической скобы с индикатором тягового
усилия на грузовой тележке кабельного крана
Лабораторный стенд «Кран стреловой» предназначен для опытного построения грузовой характеристики крана и для определения зависимости величины опорных реакций от угла поворота поворотной платформы крана в учебно-исследовательских работах. Общий вид стенда показан на рис. 2, а его рабочая схема приведена на рис 11.

Рис. 11. Схема лабораторного стенда «Кран стреловой»
Стенд состоит из регулируемого по горизонту основания 1. На основание через консольно закрепленные упругие балочки 2 опирается рама 3, имитирующая ходовую раму крана. На ходовую раму через опорно-поворотное устройство 4 опирается поворотная платформа 5, которая удерживается от радиального смещения шкворнем 6. На поворотной платформе закреплена качающаяся рама 7 с помощью шарнира 8 и опорной упругой балочки 9. На качающейся раме установлена наклоняемая стрела 10 с гибкой подвеской. Изменение наклона стрелы осуществляется винтовым механизмом 11 и канатом 12. К головке стрелы подвешена на канате 13 грузовая платформа 14. Подъем и опускание грузов осуществляется барабаном 15 с храповым остановом. Упругие опорные элементы 2 и 9 тарированы по зависимости прогиба от величины приложенной силы. Величина прогиба упругих элементов измеряется индикаторами часового типа 16. Изменение массы качающейся платформы осуществляется навешиванием дополнительных грузов 17. От полного опрокидывания качающуюся платформу защищает предохранительная шпилька с гайкой 18.
Лабораторный стенд «Электроталь» предназначен для изучения конструкции подвесных грузоподъемных устройств, широко применяемых в кранах с небольшой величиной поднимаемых грузов при производстве сборочно-разборочных работ. В лаборатории серийная электроталь марки ТЭ 0,5 В3-П установлена на двутавровой балке с пролетом 1,8 м на высоте 2,5 м. На рис. 2 электроталь показана на заднем плане со съемным грузозахватным приспособлением – клещевым захватом.

Рис. 12. Сборочный чертеж механизма подъема груза электротали
Электроталь состоит из грузоподъемного механизма и механизма передвижения. На рис. 12 показан сборочный чертеж грузоподъемного механизма электротали. Он выполнен как мотор-барабан с внешним редуктором и токосъемным устройством.
Грузоподъемный механизм состоит из сборного корпуса 1 с расположенным на подшипниках внутри его барабаном 2. В барабан запрессован статор 3 электродвигателя, а короткозамкнутый ротор 4 установлен внутри статора на подшипниках и образует с ним трехфазный короткозамкнутый электродвигатель с повышенным скольжением. Подвод электроэнергии к статору осуществляется через кольцевое токосъемное устройство 5. Ротор передает вращающий момент на барабан через муфту 6, вал-шестерню 7, зубчатое колесо 8 первой ступени редуктора, вал-шестерню 9, зубчатое колесо 10 второй ступени редуктора, трубчатый вал 11, зубчатую муфту 12. Механизм подъема оборудован двумя тормозами: колодочным автоматическим нормально замкнутым тормозом 13, размыкаемым электромагнитом, и грузоупорным тормозом 14.
Механизм передвижения электротали (рис. 13) состоит из четырех одноребордных конических колес, установленных на двух ходовых тележках 1 и 1*, соединенных шарнирно с корпусом грузоподъемного механизма тягами 2.

Рис.13. Кинематическая схема механизма передвижения электротали
Тележки расположены симметрично относительно стенки двутавра 3, используемого в качестве рельсового пути. Колеса одной из тележек приводные. Привод колес осуществляется от трехфазного электродвигателя 4 и трехступенчатой зубчатой передачи. Быстроходная ступень 5 передачи закрытая с густой смазкой, остальные – 6 и 7, открытые. Управление электроталью осуществляется от четырехкнопочного подвесного пульта с самовозвратными кнопками.
Л
Рис. 13. Подъемник телескопический
В торая
2, третья 3, четвертая 4 секции - выдвижные.
На свободном конце четвертой секции
установлена люлька 5. Первая, вторая,
третья секции на открытом конце
оборудованы обводными роликами 6, через
которые проходят отрезки канатов 7,
соединяющие основание внутренней
секции с верхом наружной секции. Канат
8, прикрепленный к основанию второй
секции, проходя через обводной ролик
первой секции, наматывается на барабан
9 механизма выдвижения секций подъемника.
К барабану можно подводить крутящий
момент силой тяжести груза 10, который
прикреплен гибкой нитью 11 к наружному
диаметру шкива 12, сидящему на одном валу
с барабаном 9. Для выдвижения секций
подъемника выбирают груз 10 такой
величины, чтобы создать на барабане
окружную силу для обеспечения
равномерного выдвижения секции с
заданным грузом в люльке.
торая
2, третья 3, четвертая 4 секции - выдвижные.
На свободном конце четвертой секции
установлена люлька 5. Первая, вторая,
третья секции на открытом конце
оборудованы обводными роликами 6, через
которые проходят отрезки канатов 7,
соединяющие основание внутренней
секции с верхом наружной секции. Канат
8, прикрепленный к основанию второй
секции, проходя через обводной ролик
первой секции, наматывается на барабан
9 механизма выдвижения секций подъемника.
К барабану можно подводить крутящий
момент силой тяжести груза 10, который
прикреплен гибкой нитью 11 к наружному
диаметру шкива 12, сидящему на одном валу
с барабаном 9. Для выдвижения секций
подъемника выбирают груз 10 такой
величины, чтобы создать на барабане
окружную силу для обеспечения
равномерного выдвижения секции с
заданным грузом в люльке.
Рис. 14. Общий вид телескопического
подъемника
Лабораторный стенд «Подъемник коленчато-рычажный» (рис. 15) является действующим макетом двухколенного подъемника с электромеханическим приводом подъема (опускания) колен. Макет позволяет получить представление о конструкции рычажных подъемников, определить условия безопасной эксплуатации подъемника. Подъемник состоит из платформы 1 с упругими опорами 2. На платформе с помощью опорно-поворотного устройства закреплена поворотная платформа 3 с порталом 4. К порталу шарнирно крепится нижнее колено 5 подъемника. Подъем (опускание) колена осуществляется электромеханическим устройством, которое состоит из электродвигателя 6, редуктора 7, приводной гайки 8 и подъемного винта 9. Верхнее колено 10 шарнирно прикреплено к нижнему колену. Подъем (опускание) верхнего колена осуществляется распорными толкателями 11, приводимыми в действие винтом электромеханического устройства 12, которое аналогично устройству подъема нижнего колена. На свободный конец верхнего колена навешена с помощью шарнира люлька 12. Пол люльки всегда сохраняет горизонтальное положение с помощью следящей системы. Максимальный подъем (опускание) колен подъемника ограничивается конечными выключателями 14, 15, включенными в цепь управления приводами колен. Поворот платформы осуществляется механизмом поворота 16. Нагрузка на опоры определяется по индикаторам 17. Управление подъемником осуществляется с пульта 18.

Рис. 15.
Подъемник
коленчато-рычажный
Лабораторный стенд «Подъемник шарнирно-рычажный» (рис. 16)

Рис. 16. Подъемник
шарнирно-рычажный
Подъемник состоит из платформы, на которую опирается рычажная система из двух шарнирно соединенных пар рычагов рамной конструкции. Каждая пара рычагов состоит из наружной 1н, 2н и внутренней 1в, 2в прямоугольных рам, соединенных между собой центральным шарниром 3-1 и 3-2 соответственно. Внешняя рама первой пары рычагов одним концом опирается с помощью шариковых подшипников на направляющие 5 платформы. Внутренняя рама этой пары также одним концом опирается с помощью подшипников на направляющие 6 платформы. Перемещение рычагов по направляющим с одной стороны ограничено динамометрической балочкой 7, а с другой стороны – винтовым упором 8. Свободные концы рычагов первой пары соединены шарнирами с концами рычагов второй пары. К свободным концам второй пары рычагов прикреплена грузовая платформа 9. Конец внешнего рычага закреплен на платформе шарнирно в проушинах 10. Свободный конец внутреннего рычага может перемещаться по направляющим 11 под платформой. На платформу можно помещать грузы 12 известной массы. Подъем (опускание) грузовой платформы осуществляется перемещением конца внутренней рамы 1в по направляющим 6 платформы с помощью винта 8. Осевое усилие, создаваемое винтом, определяют по деформации динамометрической балочки 7. Величина деформации измеряется часовым индикатором 13, шкала которого тарирована в единицах силы.
 Лабораторный стенд «Подъемник
лифтовый» (рис. 17) предназначен для
изучения принципа работы лифтовой
лебедки с канатоведущим шкивом. Лифтовый
подъемник состоит из шахты 1, установленной
на основании 2. Верхняя часть шахты имеет
потолочную площадку 3, на которой
установлена лифтовая лебедка. Лебедка
состоит из электродвигателя 4, червячного
редуктора 5. На выходном валу редуктора
установлен канатоведущий шкив (КВШ) 6.
Грузоподъемный канат охватывает КВШ
на дуге 180°. Концы каната при сходе со
шкива пропущены через отверстия в
потолочной площадке и закреплены на
кабине 8 и противовесе 9. Длина каната
обеспечивает ход кабины и противовеса
на всю высоту шахты. Управление лифтовой
лебедкой осуществляется кнопочным
выключателем 10 и выключателями
безопасности 11 и 12 при движении кабины
соответственно вверх и вниз
Лабораторный стенд «Подъемник
лифтовый» (рис. 17) предназначен для
изучения принципа работы лифтовой
лебедки с канатоведущим шкивом. Лифтовый
подъемник состоит из шахты 1, установленной
на основании 2. Верхняя часть шахты имеет
потолочную площадку 3, на которой
установлена лифтовая лебедка. Лебедка
состоит из электродвигателя 4, червячного
редуктора 5. На выходном валу редуктора
установлен канатоведущий шкив (КВШ) 6.
Грузоподъемный канат охватывает КВШ
на дуге 180°. Концы каната при сходе со
шкива пропущены через отверстия в
потолочной площадке и закреплены на
кабине 8 и противовесе 9. Длина каната
обеспечивает ход кабины и противовеса
на всю высоту шахты. Управление лифтовой
лебедкой осуществляется кнопочным
выключателем 10 и выключателями
безопасности 11 и 12 при движении кабины
соответственно вверх и вниз
Рис. 17. Макет
лифта
 .
.
Рис.18. Общий вид установки для измерения силы давления
противовеса на буфер
Внутри шахты на основании (в приямке) установлены буфера кабины и противовеса. Буфер противовеса выполнен в виде упругой консольно закрепленной пластинки. Усилие опирания противовеса на буфер контролируют по деформации упругой пластины с помощью индикатора часового типа, у которого шкала тарирована в единицах силы (рис. 18).
Лабораторные стенды «Грузовые канаты» (рис. 19) позволяют познакомиться с конструкцией грузовых канатов.
Рис.
19. Лабораторные
планшеты с образцами канатов

На нескольких планшетах представлены разные образцы канатов, применяемых в грузоподъемных машинах. Канаты каждого планшета выполнены по различным ГОСТам, различаются наружным диаметром, числом и составом проволок в пряди, видом свивки. В каждом канате на планшете одна из прядей имеет большую длину, чем остальные. Конец длинной пряди раскручен для создания возможности определения диаметра и состава проволок каната. Стенды для канатов сопровождаются таблицами соответствующих ГОСТов на стальные канаты.
Лабораторный стенд «Крюковая подвеска» (рис. 20) позволяет изучить устройство крюковой обойм, познакомиться с нормативными требованиями, предъявляемыми правилами устройства и безопасной эксплуатации грузоподъемных кранов ПБ 10–382–00 к штатным грузозахватным устройствам.
Рис. 20.
Крюковая
подвеска
Лабораторный стенд «Клещевой захват» (рис. 21) служит для изучения принципа действия клещевых захватов и усвоения методики их расчета.

Рис. 21. Общий вид клещевого захвата
Лабораторный вариант клещевого захвата состоит из двух спаренных рычагов 1 и 2, соединенных шарниром 3 по типу «ножницы». К верхним концам рычагов шарнирно присоединены тяги 4 и образуют замкнутый четырехзвенник. К общему шарниру 5 тяг присоединена петля 6 для навески захвата на крюк крана. К нижним концам рычагов шарнирно присоединены захватывающие пластины (щеки) 7. К нижним кромкам захватывающих пластин с внешней стороны приварены утяжеляющие бруски 8. Это позволяет сместить центр тяжести пластин ниже шарнира 9 их подвески и обеспечить им постоянное вертикальное положение для удобного захвата грузов.
Для удержания щек захвата в открытом положении при наведении захвата на груз предусмотрен крюк 10 временной связи общего шарнира 5 тяг с центральным шарниром 3 «ножниц». Крюк управляется стропальщиком.
Лабораторный макет «Грейферный захват» предназначен для изучения принципа работы грейферного захвата. В лаборатории используют два типа грейфера. Один грейфер имеет двухканатное управление (рис. 22), другой – одноканатное (рис. 23).


Рис. 22. Вид двухканатного грейфера в закрытом и открытом положениях
Двухканатный грейфер состоит из двух челюстей 1 и 2, выполненных в виде полой четверти цилиндра (рис. 22). Челюсти соединены шарниром 3, расположенным по оси условного цилиндра, так что в закрытом состоянии сектора образуют полуцилиндр. Контактирующие кромки секторов являются режущей частью грейферного захвата. К свободным кромкам секторов шарнирно присоединены тяги 4. Другие концы тяг соединены между собой шарнирно траверсой 5. Канат закрывания 6 грейфера присоединяется к центральному шарниру 3 челюстей, канат открывания 7 – к траверсе 5. Открывание и закрывание грейфера осуществляется натяжением соответствующего каната при ослаблении другого. Двухканатный грейфер в открытом положении показан на рис. 23. Для работы двухканатного грейфера необходима двухбарабанная лебедка с раздельным управлением барабанами.
Схема устройства одноканатного грейфера поясняется рис. 23. Грейфер имеет подъемный канат 1, который может действовать на траверсу 2 челюстей 3 или на траверсу 4 с тягами 5. Канат 1 проходит через отверстие в траверсе 4 и прикреплен к якорю 6. На траверсе 2 челюстей шарнирно установлены два крюка 7 с пружинным поджатием. Грейфер работает так.
К анат
1 с помощью якоря 6 и крюков 7, удерживая
траверсу 2, замыкает челюсти. При подъеме
грейфера на нужную высоту размыкатель
8 упирается в специальный упор, который
заставляет размыкатель развести крюки
и освободить якорь 2. Это приводит к
раскрытию челюстей грейфера и его
разгрузке. При опускании грейфера на
грунт в раскрытом положении якорь 6
собственным весом разводит крюки,
соединяется с их помощью с траверсой
2. Натяжение каната приводит к замыканию
челюстей с захватом грунта и подъему
грейфера.
анат
1 с помощью якоря 6 и крюков 7, удерживая
траверсу 2, замыкает челюсти. При подъеме
грейфера на нужную высоту размыкатель
8 упирается в специальный упор, который
заставляет размыкатель развести крюки
и освободить якорь 2. Это приводит к
раскрытию челюстей грейфера и его
разгрузке. При опускании грейфера на
грунт в раскрытом положении якорь 6
собственным весом разводит крюки,
соединяется с их помощью с траверсой
2. Натяжение каната приводит к замыканию
челюстей с захватом грунта и подъему
грейфера.
Рис. 23. Макет одноканатного грейфера

Лабораторный стенд «Эксцентриковый захват» предназначен для уяснения принципа действия захватов, удерживающих груз за счет сил трения путем прижатия их к рабочей плоскости шарнирным эксцентриком.
Эксцентриковый захват показан на рис. 24. Он состоит из П-образной скобы 1 с петлей 2 для навешивания захвата на крюк крана. К одному плечу скобы с помощью шарнира 3 присоединен эксцентрик 4. При повороте эксцентрика на оси расстояние между рабочей поверхностью А скобы и поверхностью R эксцентрика изменяется. Груз будет удерживаться только при положении эксцентрика, которое определенным образом соотносится с коэффициентом трения груза по поверхности А. Увеличение толщины груза приводит к изменению положения эксцентрика и невозможности удержания груза.
Рис. 24.
Эксцентрико-
вый захват
Лабораторный стенд «Тормоз колодочный» (рис. 25) используется для изучения устройства, принципа действия, расчета параметров и получения навыков регулировки колодочных нормально замкнутых тормозов.
Лабораторный стенд состоит из основания 1, на котором установлены электродвигатель 2, колодочный тормоз 3 типа ТКТ с электромагнитом 4 и рабочий вал 5 на опорах 6 с набором сменных дисков 7 массой 5 кг каждый и нагрузочным шкивом 8. Вал электродвигателя соединен с рабочим валом упругой втулочно-пальцевой муфтой. Корпус муфты служит одновременно и тормозным шкивом 9. Тормоз применен автоматический нормально замкнутый. Нагрузочный шкив имеет съемную грузовую площадку на гибкой подвеске 10 для определения величины тормозного момента. На валу электродвигателя установлен диск с перфорацией и датчиком (закрыт кожухом 11). Секундомер, включенный в электрическую схему управления электродвигателем, позволяет зафиксировать время торможения механизма при различных величинах маховой массы на рабочем валу.


Рис. 25. Общий вид стенда с колодочным тормозом и чертеж тормоза
Конструкция серийного колодочного тормоза типа ТКТ, используемого в лабораторной установке, показана на чертеже (рис. 25).
Собственно тормоз состоит из рычагов 1 и 2, шарнирно закрепленных на основании. К рычагам прикреплены колодки 3 с фрикционными накладками, которые охватывают тормозной шкив 4. Замыкание тормоза осуществляется пружиной сжатия 5, которая с помощью штока 6 и скобы 7 прижимает рычаги с колодками к тормозному шкиву. Изменение длины замыкающей пружины и, следовательно, тормозного момента производят гайками 8 на штоке внутри скобы. Размыкание тормоза осуществляется электромагнитом с катушкой 9 за счет сжатия замыкающей пружины при надавливании якоря электромагнита на шток 6. Якорь 10 и катушка электромагнита установлены на одном из рычагов тормоза. Отводная пружина 11 обеспечивает величину установленного зазора между колодками и шкивом. Установка суммарного зазора между колодками и тормозным шкивом осуществляется регулировочной гайкой 12. Равенство зазоров между колодками и шкивом регулируется винтом 13, расположенным на рычаге с электромагнитом.
Л абораторный
стенд «Тормоз ленточный» позволяет
уяснить принцип работы такого тормоза
и определить его параметры. Общий вид
установки с ленточным тормозом показан
на рис. 26, а ее схема - на рис. 27.
абораторный
стенд «Тормоз ленточный» позволяет
уяснить принцип работы такого тормоза
и определить его параметры. Общий вид
установки с ленточным тормозом показан
на рис. 26, а ее схема - на рис. 27.
Рис. 26.
Общий вид
установки с
ленточным тормозом

Рис. 27. Расчетная схема ленточного тормоза
Лабораторный стенд «Тормоз дисковый» (рис. 28) предназначен для изучения конструкции дисковых тормозов, определения их конструктивных и расчетных параметров.
Рис. 28.
Общий вид
лабораторной установки «Тормоз
дисковый»
Лабораторный стенд состоит из станины 1, на которой закреплен кронштейн 2 с осью 3. На оси установлен электромагнит 4, скрепленный с кронштейном 2. На оси также расположены кольцевой якорь 5 электромагнита с нажимной втулкой 6 и тормозными дисками 7 и 6, рабочий шкив 8 на подшипниках. В канавке шкива закреплен гибкий канатик 9 с нагрузочной площадкой 10. Диски 6 имеют шлицевое соединение с нажимной втулкой, а диски 7 – шлицевое соединение со шкивом 8. Питание электромагнита тормоза осуществляется от источника постоянного тока 12.
Лабораторный стенд «Лебедка грузоподъемная» предназначен для изучения механизма подъема груза на кранах, определения рабочих параметров механизма опытным и расчетным путем.
Основой лабораторного стенда является лебедка Т66Д с тяговым усилием на барабане 4,9 кН. Общий вид и схема лабораторного стенда лебедки показаны на рис. 29. Лебедка состоит из асинхронного короткозамкнутого электродвигателя 1 с номинальной мощностью 3,7 кВт при частоте вращения вала 1340 об./мин, соединенного упругой муфтой 2 с редуктором 3 типа Ц2 – 250, имеющего передаточное число 24,6. Корпус муфты служит одновременно тормозным шкивом. Тормоз 4 колодочный, автоматический, нормально замкнутый типа ТКГ- 160 установлен на быстроходном валу редуктора. Барабан 5 лебедки одним концом опирается непосредственно на тихоходный вал редуктора с призматической шпонкой, а другим концом - на опору 6 со сферическим шариковым подшипником.

Рис. 29. Общий
вид и схема лабораторного стенда
«Лебедка грузоподъемная»
Лебедка установлена на специальной раме 7, имеющей две вертикальные стойки 8, связанные по верху осью 9 неподвижных блоков полиспаста 10. Подвижные блоки 11 полиспаста установлены на оси в проушинах грузового контейнера 12. Грузоподъемный канат одним концом 13 закреплен на оси блоков контейнера, а вторым концом 14 после его проводки через подвижные и неподвижные блоки на барабане. Ветвь каната, идущая на барабан, проходит через блоки скобы динамометрического устройства 15. Деформация скобы устройства замеряется индикатором 16 часового типа, у которого шкала тарирована на усилие для упругой деформации скобы динамометрического устройства. Стенд оборудован электрическим секундомером и измерительным блоком, позволяющим контролировать потребляемую электрическую мощность из сети.
Лабораторный стенд «Механизм передвижения по рельсам» предназначен для определения характерных рабочих параметров механизма передвижения и усвоения методики его расчета. Общий вид стенда показан на рис. 30, а его схема - на рис. 31.
Стенд состоит из рельсового пути, который имеет горизонтальный 1 и наклонный 2 участки. В качестве рельсов использованы прокатные швеллеры № 8. Рельсы закреплены на некоторой высоте от пола на стойках. По рельсам передвигается ходовая тележка.
Рис. 30. Общий
вид стенда для изучения механизма
передвижения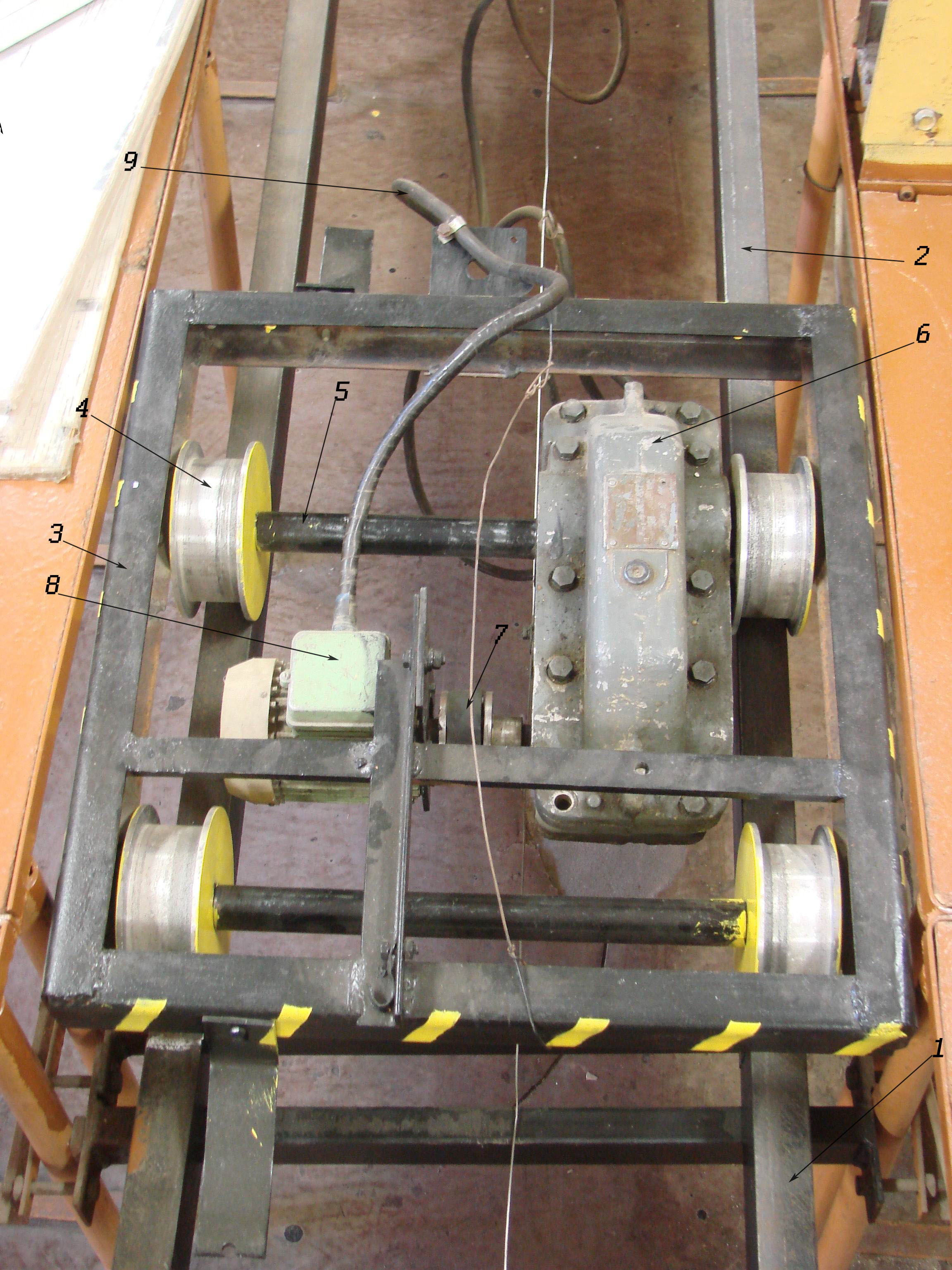
Рис. 31.
Схема стенда
механиз- ма передвижения по рельсам
Лабораторный стенд «Механизм поворота» предназначен для изучения принципа действия механизма поворота крана и усвоения расчетных зависимостей при проектировании подобных механизмов. Общий вид стенда показан на рис. 32, а его схема - на рис 33.
Рис. 32.
Стенд для
изучения работы механизма поворота
Рис.
33. Схема
стенда механизма поворота
На одной из консолей поворотной части закреплена траверса 12 с присоединенной к ней поворотной вилкой 13. В проушинах вилки на подшипниках установлен палец 14 с закрепленным в нем перпендикулярным стержнем 15. На конце стержня установлен цилиндрический груз 16. В груз встроено пишущее приспособление. На этой же консоли установлены две взаимно перпендикулярные линейки Т и Ц. Груз может качаться в плоскости параллельной одной линейке и перпендикулярной другой. При повороте вилки 13 на траверсе на угол 90° соответственно поворачивается плоскость качания груза относительно обозначенных линеек. На линейке Т записывается максимальное отклонение груза при разгоне и торможении механизма поворота.
На линейке Ц записывается максимальное отклонение груза от действия центробежных сил.
Для изменения маховой массы поворотной части на другой консоли размещают съемные грузы 17 различной массы.
Питание и управление приводом стенда осуществляется от отдельного пульта с выпрямителем и стрелочными приборами, позволяющими определить потребляемую мощность из электрической сети.