

13.2 The Center of Mass |
409 |
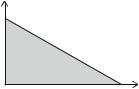
We need to Þnd both the mass, M , and the position R. Both are found by integration over the area A, which is the area of the triangle. First, we Þnd the mass by integrating over the area A. We integrate x from 0 to a, and y from 0 and up to the line corresponding to the upper boundary of the triangle. This is a line going through the points x = 0, y = b and x = a, y = 0. The straight line through these points has the equation y = b(1 − x /a).
M = |
A |
ρd A = ρ |
0 |
0 |
d y d x = ρ 0 |
b(1 − x /a) d x = |
2 ρab , |
|
|
|
|
a |
b(1−x /a) |
|
a |
1 |
|
|
|
|
|
|
|
|
(13.28) |
|
which, of course, is the well know formula for the area of a triangle multiplied with the mass density ρ of the triangle.
Now, we Þnd the position of the center of mass by calculating the integral for M R
for each component: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M X = A xρd A = ρ 0 a 0 b(1−x /a) x d y d x = ρ 0 a x b(1 − x /a) d x |
(13.29) |
||||||||||||||||||||||||||||||||
1 |
|
|
|
1 |
a3b/a = ρ |
1 |
|
1 |
a2b |
|
1 |
|
|
||||||||||||||||||||
= ρ |
|
a2b − |
|
|
|
a2b − |
|
= ρ |
|
|
a2b , |
|
|||||||||||||||||||||
2 |
3 |
2 |
3 |
6 |
|
||||||||||||||||||||||||||||
The center of mass in the x -direction is therefore: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
M X ρ (1/6) a2b 1 |
|
|
|
|
(13.30) |
|||||||||||||||||||
|
|
|
|
|
|
|
X = |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
a . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ (1/2) ab |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
M |
3 |
|
|
|
|
|
|
||||||||||||||||
We use the same method in the y-direction: |
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||
M Y = A yρd A = ρ 0 |
0 |
|
|
|
y d y d x = ρ |
2 (b(1 − x /a))2 d x |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
a |
b(1−x |
/a) |
|
|
|
|
|
|
|
|
|
|
a |
1 |
|
|
|
|||||||||
= ρb2 2 |
1 |
u2(−1/a) du = ρb2 2 3 b2a , |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(13.31) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
which gives |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Y = |
M Y ρ (1/6) b2a 1 |
b . |
|
|
|
|
(13.32) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
ρ (1/2) ab |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
M |
3 |
|
|
|
|
|
|
||||||||||||||||
The center of mass is therefore:
11
R = |
|
a i + |
|
b j . |
(13.33) |
|
|
||||
3 |
3 |
|
|
||
410 |
13 Multiparticle Systems |
13.2.4 Example: Center of Mass from Image Analysis
The center of mass is often used to describe the center of an object in an image . It may be because we are taking pictures of an object we want to track, such as the wandering behavior of a small grain of dust dancing through the air or the motion of a asteroid seen on the sky, or it may be to determine the center of mass of an irregularly shaped object.
How can we Þnd the center of mass from an image? First, we need to read the image so that we can access it. The image is taken from a classroom experiment, where we have extracted a smaller part of the image for analysis (see Fig. 7.4). We read the image ballimage02.png using:
Let us immediately display it to see if we got the right image:
subplot(1,2,1);
imshow(z)
axis(’equal’)
show()
where the axis commands are to clean up the plotted image. Notice that Python uses position [0,0] for the upper left part of the image, and that the Þrst coordinate is the vertical coordinate and the second coordinate is the horizontal coordinate, so that [iy,ix] is position [ix,iy] in the image. We call each (x , y) position for a pixel . We Þnd the size of the image using size:
>> shape(z2)
(411,559)
The image is stored as the matrix z(y, x , j ) which contain values of red (R, j = 1), green (G, j = 2), and blue (B, j = 3) . However, we cannot use these color values directly to Þnd the center of mass. Instead, we need to know if a pixel at (x , y) is a part of the object or not. We therefore set a threshold on the image, so that all pixels that are brighter than this threshold is included (set to value 1), and all the rest of the pixels are set to zero (Fig. 13.6):
z2 = (z[:,:,0]+z[:,:,1]+z[:,:,2])>1.5 subplot(1,2,2)
imshow(z2)
axis(’equal’)
The resulting images as shown in Fig. 13.7. The left image is the original image and the left image shows the Þltered image, where all the pixels that are part of the ball are colored red.
Now, we are ready to Þnd the center of mass:
|
1 |
|
1 |
|
(13.34) |
|
|
|
|
||||
X = |
|
xi , Y = |
|
yi |
||
M |
M |
|||||
|
i |
i |
|
|||
|
|
|
|
These formulas can be directly converted into an algorithm: For each pixel i , if the pixel is a part of the object, that is if z(xi , yi ) = 1, we include the positions xi and yi in the sum for the center of mass and include the pixel in the sum for the mass.

412 |
13 Multiparticle Systems |
This method is used for motion tracking of an image. If we are able to automatically Þlter the image so that we only get the object of interest, we can use this method to Þnd the center of mass of the object for each frame in a movie and thereby Þnd the center of mass as a function of time. Usually this requires careful positioning of the camera and a good choice of background for the Þlming.
13.3 Newton’s Second Law for Particle Systems
We have found that if we measure the position of a system of particles using the center of mass, R, of the system, the system behaves according to NewtonÕs second law:
Fext = M A , |
(13.35) |
where A is the acceleration of the center of mass of the system of particles, and the sum is over all external forces. This is true for any system of particles, from a galaxy consiting of starts, to the solar system, to a rigid body consiting of a large number of invididual atoms, down to a molecule or even an atom: The acceleration of the center of mass is given by the external forces acting on the system.
It is this law that allows us to use the techniques we have developed so far on any system, a solid body or a system of particles. In the previous chapters we have strictly speaking only discussed the motion of point-particles with a mass. We have always assumed that every part of a solid body has been moving with the same velocity. We have not allowed the object to oscillate, vibrate, change shape, or rotate. We have not allowed it to do any of the things that real objects do. However, we have now been saved by NewtonÕs second law for particle systems: If we measure the position of an object as the center of mass of the object, we can still use NewtonÕs second law to Þnd its motion, even if the object is vibrating, oscillating, rotating, or displaying other types of internal motion.
If I throw a ball through the room, we have previously found that the motion of the ball can be found from NewtonÕs second law for the ball:
F = G = −mg j = ma . |
(13.36) |
The beauty of NewtonÕs second law for particle systems is that we can use exactly the same analysis for a spinning or oscillating ball. The motion of the center of mass of the ball only depends on the external forces acting on the ball:
F = G = −mg j = mA . |
(13.37) |
It does not matter what happens internally in the ballÑif it is deformed, spinning, or vibratingÑthe motion of the center of the mass is the same as for a point particle as long as the external forces acting are the same.