

5.3 Newton’s Second Law of Motion
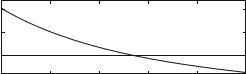
Fig. 5.5 Plot of the air resistance force, FD , as a
function of time [N]
D
F
93
 106
106
2
1.5
1
0 |
2 |
4 |
6 |
8 |
10 |
t [s]
Additional material: We can find the time when the air resistance force becomes less than FDC = 106 N, by first finding the smallest i where FD (ti ) is less than FDC , and then finding the corresponding ti . This is done by:
>>i = min(find(FD<1e6))
>>ti = t[i]
ti = |
5.4246 |
This shows that the air resistance force falls to FDC after 5.42 s. The module needs to be redesigned. You may get ideas as to how when you learn about air resistance later in this chapter.
5.4 Force Models
In order to use Newton’s second law to determine the acceleration of an object, we need to find out how large a force is—we need to determine its magnitude and direction. For this, we need theories that provide numerical values for the forces. We call such models “force models”. The force models may be based on direct, experimental measurements. We often call such models phenomenological or experimental force models. The force models can also be based on a more fundamental model or a model based on a microscopic view of the interactions.
In the following we introduce models for some of the most common types of forces acting between macroand microscopic objects. These models will be your toolbox for addressing physical processes—you need to continually build on this toolbox, as this will be your reservoir of physical knowledge. If you want to describe a ball falling through air, you need mathematical expressions for the forces on the ball: both the force due to gravity and the force due to air resistance. If you want to describe the motion of a nanometer sized particle in water close to a charged surface you need to introduce (probably sophisticated) models for the forces between the particle and the individual water molecules and between the particle and the surface.
94 |
5 Forces in One Dimension |
The range of problems you can solve depends on your knowledge of interactions— forces—and on your ability to simplify a complicated situation to a model that only contains forces you know how to address.
5.5 Force Model: Gravitational Force
Another of Newton’s great accomplishments is his discovery of the law of gravity.
According to Newton’s law of gravity, there are attractive, gravitational forces between all objects. The gravitational force on object A from object B is:
F |
from B on A = |
γ |
m · M |
r |
A B |
, |
(5.13) |
|
|
r A3 B |
|
|
|||
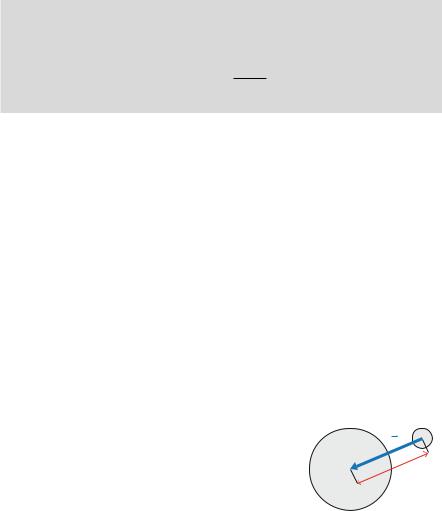
Here r A B is a vector pointing from the center of object A to the center of object B, and r A B is the length of this vector, corresponding to the distance between the centers of objects A and B (see Fig. 5.6). The quantities m and M are the gravitational masses of objects A and B respectively, and γ is the gravitational constant.
All experimental evidence shows that the gravitational masses are the same as the inertial masses. We will therefore use the same symbol, m for both the inertial mass and the gravitational mass of an object.
Constant Gravity
The general gravitational law becomes simpler for an object near the surface of the Earth or another planet. In this case, the distance r A B from the object to the center of the Earth is approximately constant and equal to the radius R of the Earth. The gravitational force can therefore be approximated by:
Fig. 5.6 The gravitational force F from object B on object A
M |
m |
F |
A |
rAB |
|
B

5.5 Force Model: Gravitational Force |
95 |
The gravitational force near the surface of a planet is approximately constant,
and equal to: |
|
|
|
|
G = −m |
γ M |
|
||
|
|
j = −mg j , |
(5.14) |
|
|
R2 |
|||
|
|
|
||
|
|
=g |
|
|
where the unit vector j points in the upward direction, and g is called the acceleration of gravity .
The constant g only depends on the radius and mass of the planet.
The Acceleration of Gravity
Why do we call g the acceleration is gravity? Because this is the acceleration of an object that is subject only to a gravitational force, which is easily seen from Newton’s second law applied to an object only affected by gravity:
ma = G = −mg j , |
(5.15) |
a = −g j , |
(5.16) |
For an object on the surface of the Earth, the acceleration of gravity is approximately g = 9.81 m/s2, whereas for an object on the surface of the Moon, the acceleration of gravity is gm = 0.17 g. You can find a table of the acceleration of gravity on the surface of various objects in the solar system in Table 5.1.
Table 5.1 The acceleration of gravity on the surface of various objects in the Solar system
Body |
Mass (kg) |
Radius (km) |
g (m/s2) |
g/ge |
Sun |
1.99 × 1030 |
6.96 × 105 |
274.13 |
27.95 |
Mercury |
3.18 × 1023 |
2.43 × 103 |
3.59 |
0.37 |
Venus |
4.88 × 1024 |
6.06 × 103 |
8.87 |
0.90 |
Earth |
5.98 × 1024 |
6.38 × 103 |
9.81 |
1.00 |
Moon |
7.36 × 1022 |
1.74 × 103 |
1.62 |
0.17 |
Mars |
6.42 × 1023 |
3.37 × 103 |
3.77 |
0.38 |
Jupiter |
1.90 × 1027 |
6.99 × 104 |
25.95 |
2.65 |
Saturn |
5.68 × 1026 |
5.85 × 104 |
11.08 |
1.13 |
Uranus |
8.68 × 1025 |
2.33 × 104 |
10.67 |
1.09 |
Neptune |
1.03 × 1026 |
2.21 × 104 |
14.07 |
1.43 |
Pluto |
1.40 × 1022 |
1.50 × 103 |
0.42 |
0.04 |