

Таймеры |
303 |
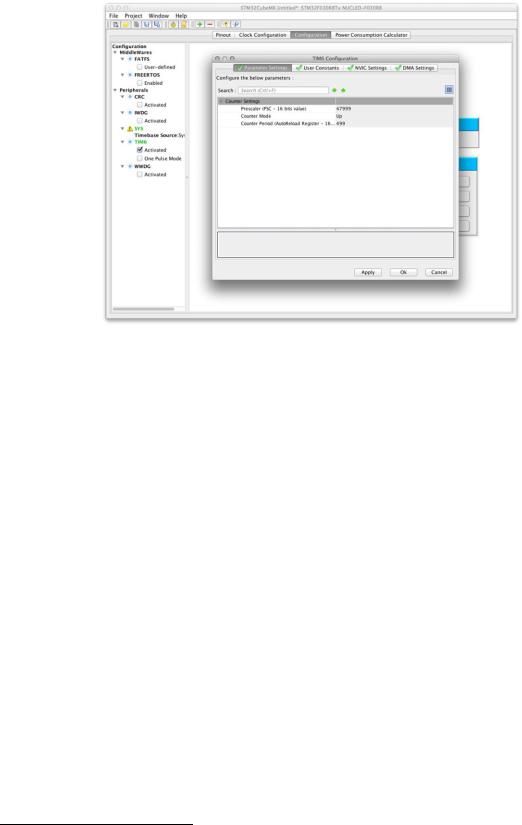
Представление конфигурации таймера позволяет сконфигурировать значения для регистров Prescaler и Period, как показано на рисунке 2. CubeMX сгенерирует весь необходимый код инициализации внутри функции MX_TIMx_Init(). Кроме того, всегда в одном
итом же диалоговом окне конфигурации можно разрешить связанные с таймером IRQ
изапросы к DMA.
Рисунок 2: CubeMX позволяет легко сгенерировать необходимый код для конфигурации таймера
11.3. Таймеры общего назначения
Большинство таймеров STM32 являются таймерами общего назначения. В отличие от базовых таймеров, рассмотренных нами ранее, они предоставляют гораздо больше возможностей взаимодействия благодаря четырем независимым каналам, которые можно использовать для измерения входных сигналов, для вывода сигналов с учетом времени, для генерации сигналов широтно-импульсной модуляции (ШИМ, англ. Pulse-Width Modulation, PWM). Таймеры общего назначения, однако, предлагают гораздо больше функциональных возможностей, которые мы постепенно откроем в этой части главы.
11.3.1.Генератор временного отсчета с внешними источниками тактового сигнала
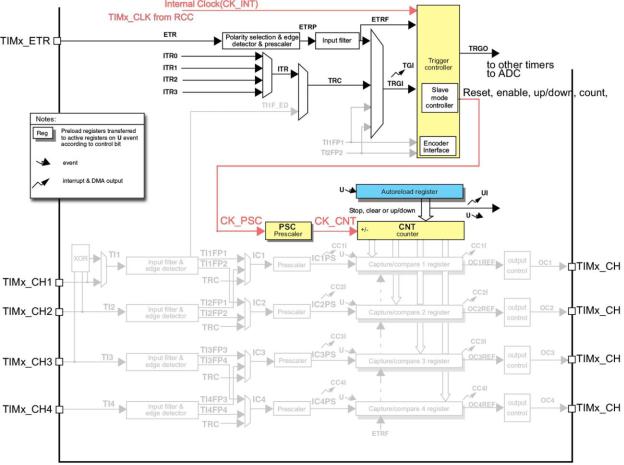
На рисунке 3 показана структурная схема таймера общего назначения17. Некоторые части диаграммы замаскированы: мы рассмотрим их более подробно позже. Путь, выделенный красным цветом, используется для питания таймера, когда в качестве источника тактового сигнала выбран сигнал шины APB: внутренний тактовый сигнал CK_INT подается на предделитель Prescaler (PSC), который, в свою очередь, определяет, насколько быстро увеличивается/уменьшается регистр счетчика Counter Register (CNT). Этот регистр сравнивается с содержимым регистра автоперезагрузки auto-reload register (который заполняется значением поля TIM_Base_InitTypeDef.Period). Когда они совпадают, генерируется событие UEV и срабатывает соответствующий IRQ, если он разрешен.
17 Рисунок построен на основе рисунка, найденного в справочном руководстве RM0368 (http://www.st.com/web/en/resource/technical/document/reference_manual/DM00096844.pdf) от ST.
Таймеры |
304 |
Рисунок 3: Структурная схема таймера общего назначения
На рисунке 3 видно, что таймер может получать «стимулирование» от других источников. Их можно разделить на две основные группы:
•Источники тактового сигнала, которые используются для тактирования тай-
мера. Они могут поступать от внешних источников, подключенных к выводам микроконтроллера, или от других таймеров, подключенных к микроконтроллеру. Имейте в виду, что таймер не может работать без источника тактового сигнала, поскольку он используется для инкрементирования регистра счетчика.
•Источники запуска (Trigger sources), которые используются для синхронизации таймера с внешними источниками, подключенными к выводам микроконтроллера, или с другими таймерами, подключенными внутри. Например, можно сконфигурировать таймер так, чтобы он начал отсчет, когда его запустит (triggers) внешнее событие. В этом случае таймер тактируется одним источником тактового сигнала (который может быть как шиной APBx, так и внешним источником тактового сигнала, подключенным к выводу ETR2), а управляется (то есть то, когда он начинает отсчет и т. д.) другим устройством.
Взависимости от типа таймера и его фактической реализации, таймер может тактироваться от:
•Внутреннего TIMx_CLK, предоставленного RCC (показано в параграфе 11.2)
•Внутреннего триггерного входа от 0 до 3
−ITR0, ITR1, ITR2 и ITR3, использующие другой таймер (ведущий) в качестве предделителя этого таймера (ведомого) (показано в параграфе 11.3.1.2)

Таймеры |
305 |
•Выводов внешнего входного канала (показано в параграфе 11.3.1.2)
−Вывод 1: TI1FP1 или TI1F_ED
−Вывод 2: TI2FP2
•Внешних выводов ETR:
−Вывод ETR1 (показано в параграфе 11.3.1.2)
−Вывод ETR2 (показано в параграфе 11.3.1.1)
Напротив, таймер может быть запущен от:
•Внутренних триггерных входов от 0 до 3
−ITR0, ITR1, ITR2 и ITR3, использующие другой таймер в качестве ведущего (показано в параграфе 11.3.2)
•Выводов внешнего входного канала (показано в параграфе 11.3.2)
−Вывод 1: TI1FP1 или TI1F_ED
−Вывод 2: TI2FP2
•Внешних выводов ETR1
Давайте изучим эти способы тактирования/запуска таймера от внешнего источника на основе анализа практических примеров.
11.3.1.1. Режим внешнего тактирования 2
Таймеры общего назначения могут тактироваться от внешних источников, устанавливая их в двух разных режимах: Режим внешнего источника тактового сигнала 1 и 2 (External Clock Source Mode). Первый доступен, когда таймер сконфигурирован в режиме ведомого. Мы будем изучать этот режим в следующем параграфе.
Напротив, второй режим активируется просто с помощью внешнего источника тактового сигнала. Он позволяет использовать более точные и выделенные источники и, в конечном итоге, еще больше снизить частоту отсчета. Фактически, когда выбран Режим внешнего тактирования 2, формула для вычисления частоты возникновения событий обновления становится следующей:
Событие обновления = |
|
ВнешТС |
|
)(Prescaler +1)(Period +1)(RepetitionCounter +1) |
|
(Предделитель |
ВнешТС |
|
|
|
[2]
где ВнешТС – частота внешнего источника, а ПредделительВнешТС – делитель частоты источника, который может принимать значения 1, 2, 4 и 8.
Источник тактового сигнала таймера общего назначения может быть выбран с помощью
функции HAL_TIM_ConfigClockSource() и экземпляра структуры TIM_ClockConfigTypeDef,
которая определена следующим образом:
typedef struct { |
|
|
uint32_t ClockSource; |
/* Источник тактового сигнала TIM |
*/ |
uint32_t ClockPolarity; |
/* Полярность тактового сигнала TIM |
*/ |
uint32_t ClockPrescaler; |
/* Предделитель тактового сигнала TIM |
*/ |
uint32_t ClockFilter; |
/* Фильтр тактового сигнала TIM |
*/ |
} TIM_ClockConfigTypeDef; |
|
|

Таймеры |
306 |
•ClockSource: задает источник тактового сигнала, используемого для питания тай-
мера. Может принимать значение из таблицы 7. По умолчанию выбран режим
TIM_CLOCKSOURCE_INTERNAL.
•ClockPolarity: задает полярность (активный фронт) тактового сигнала, использу-
емого для питания таймера. Может принимать значение из таблицы 8. По умол-
чанию выбран режим TIM_CLOCKPOLARITY_RISING.
•ClockPrescaler: задает предделитель для внешнего источника тактового сигнала.
Может принимать значение из таблицы 9. По умолчанию выбрано значение
TIM_CLOCKPRESCALER_DIV1.
•ClockFilter: это 4-битное поле, задает частоту, используемую для выборки внеш-
него тактового сигнала, и размер применяемого к нему цифрового фильтра. Цифровой фильтр состоит из счетчика событий, в котором требуется N последовательных событий для подтверждения перепада сигнала на выходе. Обратитесь к техническому описанию вашего микроконтроллера за тем, как вычисляется
(Dead-Time Signal – частота сигнала мертвого времени). По умолчанию фильтр от-
ключен.
Таблица 7: Доступные режимы источника тактового сигнала для таймеров общего назначения и расширенного управления
Режим источника тактового |
|
сигнала |
Описание |
TIM_CLOCKSOURCE_INTERNAL |
Таймер тактируется от шины APBx, к которой подключен. |
TIM_CLOCKSOURCE_ETRMODE1 |
Данный режим называется Режимом внешнего тактирова- |
|
ния 118 и доступен, когда таймер сконфигурирован в |
|
режиме ведомого. Таймер может тактироваться внутрен- |
|
ним/внешним источником, подключенным к выводу |
|
ITR0, ITR1, ITR2, ITR3, TI1FP1, TI2FP2 или ETR1. |
TIM_CLOCKSOURCE_ETRMODE2
Данный режим называется Режимом внешнего тактирова-
ния 2. Таймер может тактироваться от внешнего источника, подключенного к выводу ETR2.
Таблица 8: Доступные режимы полярности внешнего тактового сигнала для таймеров общего назначения и расширенного управления
Режим полярности внешнего |
|
тактового сигнала |
Описание |
|
|
TIM_CLOCKPOLARITY_RISING |
Таймер синхронизируется с передним (нарастающим) |
|
фронтом внешнего источника тактового сигнала |
TIM_CLOCKPOLARITY_FALLING
TIM_CLOCKPOLARITY_BOTHEDGE
Таймер синхронизируется с задним (спадающим) фронтом внешнего источника тактового сигнала
Таймер синхронизируется с передним и задним фронтами внешнего источника тактового сигнала (это увеличит частоту дискретизации)
18 В документации ST эти режимы также называются Режимами внешнего запуска 1 и 2 (ETR1 и ETR2, англ.
External Trigger mode).
Таймеры |
307 |
Таблица 9: Доступные режимы предделителя внешнего тактового сигнала для таймеров общего назначения и расширенного управления
Режим предделителя внешнего |
|
|
тактового сигнала |
Описание |
|
|
|
|
TIM_CLOCKPRESCALER_DIV1 |
Предделитель не используется |
|
TIM_CLOCKPRESCALER_DIV2 |
Захват выполняется один раз каждые 2 события |
|
TIM_CLOCKPRESCALER_DIV4 |
Захват выполняется один раз каждые 4 |
события |
TIM_CLOCKPRESCALER_DIV8 |
Захват выполняется один раз каждые 8 |
событий |
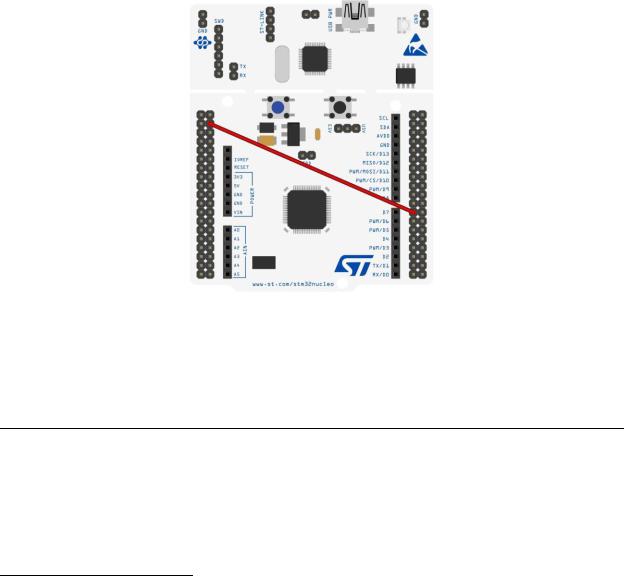
Давайте создадим пример, который показывает, как использовать внешний источник тактового сигнала для таймера TIM3. Пример состоит в направлении сигнала с вывода MCO на вывод TIM3_ETR2, который соответствует выводу PD2 для всех плат Nucleo, предоставляющих данный таймер. Это легко сделать с помощью Morpho-разъемов, как показано на рисунке 4 для Nucleo-F030R8 (для вашей Nucleo используйте инструмент CubeMX, чтобы идентифицировать вывод MCO и соответствующую схему выводов из Приложения C).
Рисунок 4: Как направить вывод MCO к выводу TIM3_ETR на плате Nucleo-F030R8
Вывод MCO разрешен и подключен к источнику тактового сигнала LSE, который работает на частоте 32,768 кГц19. Следующий код показывает наиболее важные части примера.
Имя файла: src/main-ex3.c
23void MX_TIM3_Init(void) {
24TIM_ClockConfigTypeDef sClockSourceConfig;
26htim3.Instance = TIM3;
27htim3.Init.Prescaler = 0;
28htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
29htim3.Init.Period = 16383;
19 К сожалению, ранние выпуски плат Nucleo не предоставляют внешний низкочастотный источник тактового сигнала. Если это ваш случай, измените примеры так, чтобы использовался LSI-генератор. Более того, в микроконтроллере STM32F103R8 невозможно направить ни LSI, ни LSE на вывод MCO. По этой причине в этом примере на Nucleo-F103R8 в качестве источника MCO используется HSI.
Таймеры |
308 |
30htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
31htim3.Init.RepetitionCounter = 0;
32HAL_TIM_Base_Init(&htim3);
33
34sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_ETRMODE2;
35sClockSourceConfig.ClockPolarity = TIM_CLOCKPOLARITY_NONINVERTED;
36sClockSourceConfig.ClockPrescaler = TIM_CLOCKPRESCALER_DIV1;
37sClockSourceConfig.ClockFilter = 0;
38HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig);
39
40HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
41HAL_NVIC_EnableIRQ(TIM3_IRQn);
42}
43
44void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base) {
45GPIO_InitTypeDef GPIO_InitStruct;
46if(htim_base->Instance==TIM3) {
47/* Разрешение тактирования периферии */
48__HAL_RCC_TIM3_CLK_ENABLE();
49__HAL_RCC_GPIOD_CLK_ENABLE();
50
51/**Конфигурация выводов GPIO TIM3
52PD2 ------> TIM3_ETR
53*/
54GPIO_InitStruct.Pin = GPIO_PIN_2;
55GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
56GPIO_InitStruct.Pull = GPIO_NOPULL;
57GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
58HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
59}
60}
Строки [26:32] конфигурируют таймер TIM3, устанавливая его период на 19999. Строки [34:38] конфигурируют внешний источник тактового сигнала для TIM3. Поскольку LSE-генератор работает на частоте 32,768 кГц, то используя уравнение [2], мы можем вычислить частоту UEV, которая равна:
Событие обновления = |
|
32768 |
|
= 2 Гц = 0,5 с |
|
(1)(0 |
+1)(16383 +1)(0 |
+1) |
|||
|
|
Наконец, строки [48:58] включают TIM3 и конфигурируют вывод PD2 (который соответствует выводу TIM3_ETR2) в качестве источника входного сигнала.
Прочитайте внимательно
Важно подчеркнуть, что порт D GPIO должен быть включен, прежде чем мы сможем использовать его в качестве источника тактового сигнала для TIM3, используя макрос __GPIOD_CLK_ENABLE(). То же самое относится и к TIM3, кото-
рый включается с помощью __TIM3_CLK_ENABLE(): это необходимо, поскольку внешние тактовые сигналы подаются на предделитель не напрямую, а