

Управление DMA |
248 |
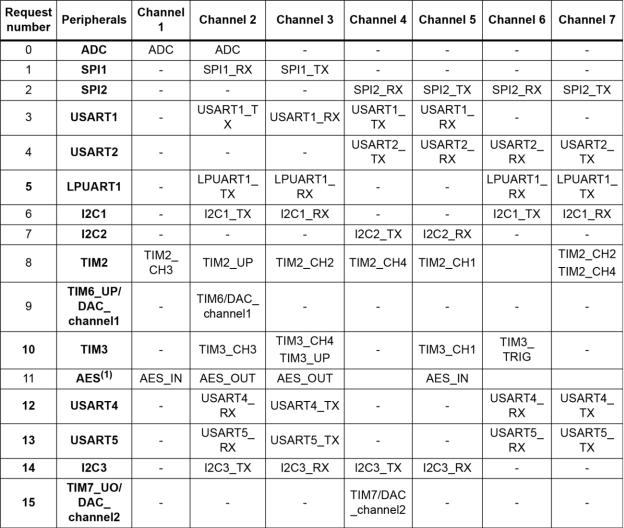
Таблица 4: Отображение каналов/запросов к DMA в микроконтроллере STM32L053
9.2. Модуль HAL_DMA
После долгих разговоров пришло время начать писать код.
Строго говоря, программирование контроллера DMA довольно простое, особенно если понятно, как контроллер DMA работает с теоретической точки зрения. Кроме того, CubeHAL предназначен для абстрагирования большинства базовых аппаратных подробностей.
Все функции HAL, связанные с манипулированием DMA, спроектированы таким образом, что они принимают в качестве первого параметра экземпляр структуры Си DMA_HandleTypeDef. Эта структура немного отличается от HAL CubeF2/F4/F7 и других CubeHAL из-за другой реализации контроллера DMA, как было показано в предыдущих параграфах. По этой причине мы покажем их отдельно.
Управление DMA |
249 |
9.2.1. DMA_HandleTypeDef в HAL для F0/F1/F3/L0/L1/L4
Структура DMA_HandleTypeDef определена в HAL CubeF0/F1/F3/L1 следующим образом:
typedef struct { |
|
|
|
|
DMA_Channel_TypeDef |
*Instance; |
/* |
Базовый адрес регистров |
*/ |
DMA_InitTypeDef |
Init; |
/* |
Параметры связи через DMA |
*/ |
HAL_LockTypeDef |
Lock; |
/* |
Блокировка объекта DMA |
*/ |
__IO HAL_DMA_StateTypeDef State; |
/* |
Состояние работы DMA |
*/ |
|
void |
*Parent; |
/* |
Состояние родительского объекта |
*/ |
void |
(* XferCpltCallback)( struct __DMA_HandleTypeDef * hdma); |
|
||
void |
(* XferHalfCpltCallback)( struct __DMA_HandleTypeDef * hdma); |
|||
void |
(* XferErrorCallback)( struct __DMA_HandleTypeDef * hdma); |
|
||
__IO uint32_t |
ErrorCode; |
/* |
Код ошибки DMA |
*/ |
} DMA_HandleTypeDef; |
|
|
|
|
Давайте более подробно рассмотрим наиболее важные поля данной структуры.
•Instance (экземпляр): это указатель на дескриптор пары DMA/канал, который мы
будем использовать. Например, DMA1_Channel5 обозначает пятый канал DMA1. Помните, что каналы связаны с периферийными устройствами во время проектирования микроконтроллера, поэтому обратитесь к техническому описанию вашего микроконтроллера, чтобы узнать канал, связанный с периферийным устройством, которое вы хотите использовать в режиме DMA.
•Init: является экземпляром структуры Си DMA_InitTypeDef, которая используется
для конфигурации пары DMA/канал. Мы рассмотрим ее более подробно в ближайшее время.
•Parent (родитель): данный указатель используется HAL для отслеживания пери-
ферийных дескрипторов, связанных с текущей парой DMA/канал. Например, если мы используем UART в режиме DMA, это поле будет указывать на экземпляр UART_HandleTypeDef. Скоро мы увидим, как периферийные дескрипторы «связаны» с этим полем.
•XferCpltCallback, XferHalfCpltCallback, XferErrorCallback: это указатели на функ-
ции, используемые в качестве обратных вызовов для осведомления пользовательского кода о том, что передача через DMA завершена, завершена наполовину или произошла ошибка. Они автоматически вызываются HAL при срабатывании прерываний DMA функцией HAL_DMA_IRQHandler(), как мы увидим далее.
Все действия по конфигурации DMA/канал выполняются с использованием экземпляра структуры Си DMA_InitTypeDef, которая определена следующим образом:
typedef struct { uint32_t Direction; uint32_t PeriphInc; uint32_t MemInc;
uint32_t PeriphDataAlignment; uint32_t MemDataAlignment; uint32_t Mode;
uint32_t Priority; } DMA_InitTypeDef;
Управление DMA |
250 |
•Direction: задает направление передачи через DMA и может принимать одно из
значений, указанных в таблице 5.
•PeriphInc: как было сказано в предыдущих параграфах, контроллер DMA имеет
один периферийный порт, используемый для указания адреса периферийного регистра, участвующего в передаче памяти (например, для интерфейса UART адрес его Регистра данных (Data Register, DR)). Поскольку передача памяти через DMA обычно включает в себя несколько байт, DMA может быть запрограммирован на автоматическое увеличение периферийного регистра для каждого переданного байта. Это справедливо как для передачи типа память-в-память, так и для периферийных устройств, предоставляющих байтовую, полусловную и пословную адресации (как внешняя память SRAM). В этом случае поле принимает значение
DMA_PINC_ENABLE, в противном случае DMA_PINC_DISABLE.
•MemInc: это поле имеет то же значение, что и поле PeriphInc, но оно предполагает
порт памяти. Может принимать значение DMA_MINC_ENABLE, чтобы обозначить, что указанный адрес памяти должен увеличиваться после каждого переданного байта, или значение DMA_MINC_DISABLE, чтобы оставлять его неизменным после каждой передачи.
•PeriphDataAlignment: размеры передаваемых данных периферийного устройства и памяти полностью программируются через это поле и следующее. Оно может принимать значение из таблицы 6. Контроллер DMA спроектирован так, чтобы автоматически выполнять выравнивание данных (упаковку/распаковку) при различии в размерах данных источника и пункта назначения. Эта тема выходит за рамки данной книги. Пожалуйста, обратитесь к справочному руководству по вашему микроконтроллеру.
•MemDataAlignment: задает размер данных, передаваемых из памяти, и может при-
нимать значение из таблицы 7.
•Mode: контроллер DMA в микроконтроллерах STM32 имеет два режима работы:
DMA_NORMAL и DMA_CIRCULAR. В обычном режиме (normal mode) DMA отправляет ука-
занный объем данных из источника в порт назначения и останавливает транзакции. Он должен быть снова переподготовлен, чтобы сделать еще одну передачу. В циклическом режиме (circular mode) в конце передачи он автоматически сбрасывает счетчик передачи и начинает передачу снова с первого байта буфера источника (то есть он рассматривает буфер источника как кольцевой буфер). Данный режим также называется непрерывным режимом (continuous mode), и это единственный способ достичь действительно высокой скорости передачи в некоторых периферийных устройствах (например, высокоскоростных устройствах SPI).
•Priority: еще одна важная особенность контроллера DMA – способность назна-
чать приоритеты каждому каналу, чтобы управлять одновременными запросами. Это поле может принимать значение из таблицы 8. В случае одновременных запросов от периферийных устройств, подключенных к каналам с одинаковым приоритетом, сначала срабатывает канал с меньшим порядковым номером.
Управление DMA |
|
|
|
251 |
Таблица 5: Доступные направления передачи через DMA |
|
|||
Направление передачи через DMA |
Описание |
|
||
|
|
|
|
|
DMA_PERIPH_TO_MEMORY |
|
Направление передачи из периферии в память |
|
|
DMA_MEMORY_TO_PERIPH |
|
Направление передачи из памяти в периферию |
|
|
DMA_MEMORY_TO_MEMORY |
|
Направление передачи из памяти в память |
|
|
Таблица 6: Размер данных периферийного устройства при передаче через DMA |
|
|||
Размер периферийных данных |
Описание |
|
||
|
|
|
|
|
DMA_PDATAALIGN_BYTE |
|
Выравнивание периферийных данных: побайтно |
|
|
DMA_PDATAALIGN_HALFWORD |
|
Выравнивание периферийных данных: полусловно |
||
DMA_PDATAALIGN_WORD |
|
Выравнивание периферийных данных: пословно |
|
|
Таблица 7: Размер данных в памяти при передаче через DMA |
|
|||
Размер данных в памяти |
Описание |
|
||
|
|
|
|
|
DMA_MDATAALIGN_BYTE |
|
Выравнивание данных в памяти: байт |
|
|
DMA_MDATAALIGN_HALFWORD |
|
Выравнивание данных в памяти: полуслово |
|
|
DMA_MDATAALIGN_WORD |
|
Выравнивание данных в памяти: слово |
|
|
Таблица 8: Доступные приоритеты канала DMA |
|
|||
Приоритет канала DMA |
|
Описание |
|
|
|
|
|
|
|
DMA_PRIORITY_LOW |
|
Уровень приоритета: низкий |
|
|
DMA_PRIORITY_MEDIUM |
|
Уровень приоритета: средний |
|
|
DMA_PRIORITY_HIGH |
|
Уровень приоритета: высокий |
|
|
DMA_PRIORITY_VERY_HIGH |
|
Уровень приоритета: очень высокий |
|
|
9.2.2. DMA_HandleTypeDef в HAL для F2/F4/F7 |
|
|||
Структура DMA_HandleTypeDef определена в HAL CubeF2/F4/F7 следующим образом: |
|
|||
typedef struct { |
|
|
|
|
DMA_Stream_TypeDef |
*Instance; |
/* |
Базовый адрес регистров |
*/ |
DMA_InitTypeDef |
Init; |
/* Параметры связи через DMA |
*/ |
|
HAL_LockTypeDef |
Lock; |
/* |
Блокировка объекта DMA |
*/ |
__IO HAL_DMA_StateTypeDef State; |
/* |
Состояние работы DMA |
*/ |
|
void |
*Parent; |
/* |
Состояние родительского объекта |
*/ |
void |
(* XferCpltCallback)( struct __DMA_HandleTypeDef * hdma); |
|
||
void |
(* XferHalfCpltCallback)( struct __DMA_HandleTypeDef * hdma); |
|||
void |
(* XferM1CpltCallback)( struct __DMA_HandleTypeDef * hdma); |
|||
void |
(* XferErrorCallback)( struct __DMA_HandleTypeDef * hdma); |
|||
__IO uint32_t |
ErrorCode; |
/* |
Код ошибки DMA |
*/ |
uint32_t |
StreamBaseAddress; /* Базовый адрес потока DMA |
*/ |
||
uint32_t |
StreamIndex; |
/* Индекс потока DMA |
*/ |
|
} DMA_HandleTypeDef; |
|
|
|
|
Давайте более подробно рассмотрим наиболее важные поля данной структуры.
Управление DMA |
252 |
•Instance (экземпляр): указатель на дескриптор потока, который мы будем исполь-
зовать. Например, DMA1_Stream6 обозначает седьмой13 поток DMA1. Помните, что поток должен быть связан с каналом, прежде чем его можно будет использовать. Это достигается через поле Init, как мы увидим через некоторое время. Помните также, что каналы связаны с периферийными устройствами во время проектирования микроконтроллера, поэтому обратитесь к техническому описанию вашего микроконтроллера, чтобы увидеть канал, связанный с периферийным устройством, которое вы хотите использовать в режиме DMA.
•Init: это экземпляр структуры Си DMA_InitTypeDef, которая используется для кон-
фигурации тройки DMA/канал/поток. Мы рассмотрим ее более подробно в ближайшее время.
•Parent (родитель): этот указатель используется HAL для отслеживания перифе-
рийных дескрипторов, связанных с текущей парой DMA/канал. Например, если мы используем UART в режиме DMA, это поле будет указывать на экземпляр UART_HandleTypeDef. Скоро мы увидим, как периферийные дескрипторы «связаны» с этим полем.
•XferCpltCallback, XferHalfCpltCallback, XferM1CpltCallback, XferErrorCallback: это
указатели на функции, используемые в качестве обратных вызовов для осведомления пользовательского кода о том, что передача DMA завершена, завершена наполовину, передача первого буфера при многобуферной передаче завершена или
произошла ошибка. Они автоматически вызываются HAL при срабатывании прерывания DMA функцией HAL_DMA_IRQHandler(), как мы увидим далее.
Все действия по конфигурации DMA/канал выполняются с использованием экземпляра структуры Си DMA_InitTypeDef, которая определена следующим образом:
typedef struct { uint32_t Channel; uint32_t Direction; uint32_t PeriphInc; uint32_t MemInc;
uint32_t PeriphDataAlignment; uint32_t MemDataAlignment; uint32_t Mode;
uint32_t Priority; uint32_t FIFOMode; uint32_t FIFOThreshold; uint32_t MemBurst; uint32_t PeriphBurst;
} DMA_InitTypeDef;
•Channel: задает канал DMA, используемый для выбранного потока. Может прини-
мать значения от DMA_CHANNEL_0, DMA_CHANNEL_1 до DMA_CHANNEL_7. Помните, что пе-
риферийные устройства связаны с потоками и каналами во время проектирования микроконтроллера, поэтому обратитесь к техническому описанию вашего микроконтроллера, чтобы увидеть поток, связанный с периферийным устройством, которое вы хотите использовать в режиме DMA.
13 Отсчет потоков начинается с нуля.
Управление DMA |
253 |
•Direction: задает направление передачи DMA и может принимать одно из значе-
ний, указанных в таблице 5.
•PeriphInc: как было сказано в предыдущих параграфах, контроллер DMA имеет
один периферийный порт, используемый для указания адреса периферийного регистра, участвующего в передаче памяти (например, для интерфейса UART адрес его Регистра данных (Data Register, DR)). Поскольку передача памяти через DMA обычно включает в себя несколько байт, DMA может быть запрограммирован на автоматическое увеличение периферийного регистра для каждого переданного байта. Это справедливо как для передачи типа память-в-память, так и для периферийных устройств, предоставляющих байтовую, полусловную и пословную адресации (как внешняя память SRAM). В этом случае поле принимает значение
DMA_PINC_ENABLE, в противном случае DMA_PINC_DISABLE.
•MemInc: это поле имеет то же значение, что и поле PeriphInc, но оно предполагает
порт памяти. Может принимать значение DMA_MINC_ENABLE, чтобы обозначить, что указанный адрес памяти должен увеличиваться после каждого переданного байта, или значение DMA_MINC_DISABLE, чтобы оставлять его неизменным после каждой передачи.
•PeriphDataAlignment: размеры передаваемых данных периферийного устройства и памяти полностью программируются через это поле и следующее. Оно может принимать значение из таблицы 6. Контроллер DMA спроектирован так, чтобы автоматически выполнять выравнивание данных (упаковку/распаковку) при различии в размерах данных источника и пункта назначения. Эта тема выходит за рамки данной книги. Пожалуйста, обратитесь к справочному руководству по вашему микроконтроллеру.
•MemDataAlignment: задает размер данных, передаваемых из памяти, и может при-
нимать значение из таблицы 7.
•Mode: контроллер DMA в микроконтроллерах STM32 имеет два режима работы:
DMA_NORMAL и DMA_CIRCULAR. В обычном режиме (normal mode) DMA отправляет ука-
занный объем данных из источника в порт назначения и останавливает транзакции. Он должен быть снова переподготовлен, чтобы сделать еще одну передачу. В циклическом режиме (circular mode) в конце передачи он автоматически сбрасывает счетчик передачи и начинает передачу снова с первого байта буфера источника (то есть он рассматривает буфер источника как кольцевой буфер). Данный режим также называется непрерывным режимом (continuous mode), и это единственный способ достичь действительно высокой скорости передачи в некоторых периферийных устройствах (например, высокоскоростных устройствах SPI).
•Priority: одна важная особенность контроллера DMA – способность назначать
приоритеты каждому потоку, чтобы управлять одновременными запросами. Это поле может принимать значение из таблицы 8. В случае одновременных запросов от периферийных устройств, подключенных к потокам с одинаковым приоритетом, сначала запускается поток с меньшим порядковым номером.
•FIFOMode: используется для включения/отключения в DMA режима FIFO при по-
мощи макросов DMA_FIFOMODE_ENABLE/DMA_FIFOMODE_DISABLE. В микроконтроллерах
STM32F2/F4/F7 каждый поток имеет независимый буфер FIFO из 4 слов (4*32 бита). Буфер FIFO используется для временного хранения данных, поступающих от источника, до их передачи в пункт назначения. При отключении используется прямой режим, англ. direct mode (это «обычный» режим, доступный в других микроконтроллерах STM32).
Управление DMA |
254 |
Режим FIFO предоставляет несколько преимуществ: он сокращает доступ к SRAM и, таким образом, дает больше времени другим ведущим устройствам для доступа к шинной матрице без дополнительного параллелизма; он позволяет программному обеспечению выполнять пакетные транзакции (burst transactions), которые оптимизируют пропускную способность передачи (подробнее об этом чуть позже); также он позволяет упаковывать/распаковывать данные для адаптации размеров данных источника и получателя без дополнительного доступа к DMA. Если в DMA включен режим FIFO, можно использовать упаковку/распаковку данных и/или режим пакетной передачи. Буфер FIFO автоматически очищается в соответствии с пороговым уровнем. Этот уровень конфигурируется программно в диапазонах 1/4, 1/2, 3/4 буфера или его полный размер.
•FIFOThreshold: задает пороговый уровень буфера FIFO и может принимать значе-
ние из таблицы 9.
•MemBurst: алгоритм планирования Round Robin управляет доступом к потоку DMA,
прежде чем он сможет передать последовательность байтов по шине AHB. Это «замедляет» операции передачи, и для некоторых высокоскоростных периферийных устройств это может стать узким местом. Пакетная передача позволяет потоку DMA неоднократно передавать данные, не проходя все этапы, необходимые для передачи каждого фрагмента данных в отдельной транзакции. Режим пакетной передачи (burst mode) работает в сочетании с буфером FIFO и ничего не говорит о количестве переданных байт. Он основан на конфигурации поля MemDataAlignment (когда мы выполняем передачу типа память-в-периферию). MemBurst указывает количество транзакций, выполненных потоком, и состоит из байтов, полуслов и слов в зависимости от конфигурации источника. Поле MemBurst может принимать одно из значений таблицы 10.
•PeriphBurst: это поле означает то же, что и предыдущее, но оно связано с переда-
чами типа периферия-в-память. Может принимать значение из таблицы 11.
Таблица 9: Доступные пороговые уровни FIFO
Пороговые уровни FIFO |
Описание |
|
|
DMA_FIFO_THRESHOLD_1QUARTERFULL |
Конфигурация порога в 1/4 буфера FIFO |
DMA_FIFO_THRESHOLD_HALFFULL |
Конфигурация порога в 1/2 буфера FIFO |
DMA_FIFO_THRESHOLD_3QUARTERSFULL |
Конфигурация порога в 3/4 буфера FIFO |
DMA_FIFO_THRESHOLD_FULL |
Конфигурация порога в полный буфер FIFO |
Таблица 10: Доступные режимы DMA пакетной передачи памяти |
|
Режимы пакетной передачи памяти |
Описание |
|
|
DMA_MBURST_SINGLE |
Одиночный пакет |
DMA_MBURST_INC4 |
Разрыв на 4 пакета (Burst of 4 beats) |
DMA_MBURST_INC8 |
Разрыв на 8 пакетов |
DMA_MBURST_INC16 |
Разрыв на 16 пакетов |
Таблица 11: Доступные режимы DMA пакетной передачи периферийных данных
Режимы пакетной передачи периферийных данных |
Описание |
|
|
|
|
DMA_PBURST_SINGLE |
Одиночный пакет |
|
DMA_PBURST_INC4 |
Разрыв на 4 |
пакета |
DMA_PBURST_INC8 |
Разрыв на 8 |
пакетов |
DMA_PBURST_INC16 |
Разрыв на 16 пакетов |
|