

Установка инструментария |
63 |
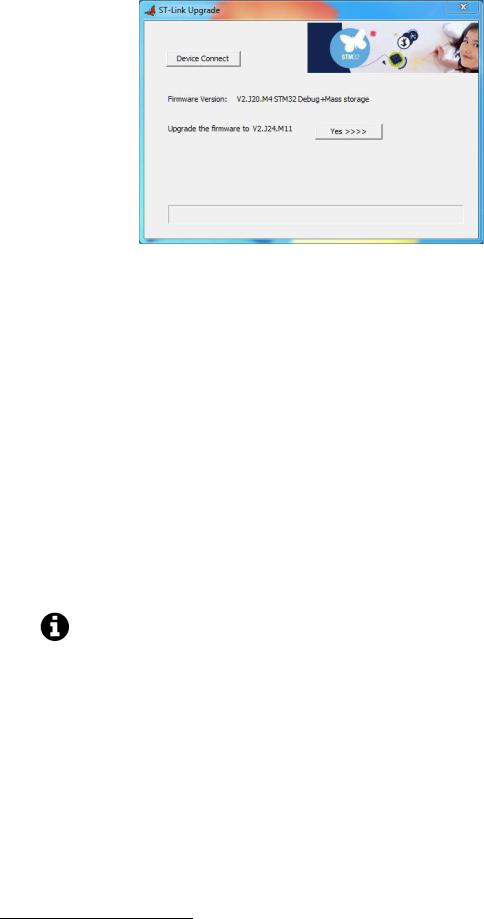
Рисунок 1121: Программа ST-LINK Upgrade
Через некоторое время ST-LINK Upgrade покажет, нужно ли обновлять микропрограммное обеспечение Nucleo (указав другую версию, как показано на рисунке 11). Если это так, нажмите кнопку Yes >>>> и следуйте инструкциям.
Поздравляю. Инструментарий завершен, и вы можете перейти к следующей главе.
2.3. Linux – Установка инструментария
Вся процедура установки предполагает следующие системные требования:
•ПК под управлением Ubuntu Linux 14.04 LTS Desktop (также известная как Trusty Tahr) с достаточными аппаратными ресурсами (я предлагаю иметь как минимум 4 ГБ ОЗУ и 5 ГБ свободного места на жестком диске); инструкции могут быть легко организованы для других дистрибутивов Linux.
•Java 8 Update 121 или более поздняя версия. Прочитайте следующий параграф, посвященный установке Java, если она еще не установлена.
Выбор папки инструментария
Одна интересная особенность Eclipse заключается в том, что ее не нужно устанавливать по определенному пути на жестком диске. Это позволяет пользователю решить, куда поместить весь инструментарий и, при желании, переместить его в другое место или скопировать на другую машину (это действительно полезно, если вы обслуживаете несколько машин Linux).
В данной книге мы будем предполагать, что весь инструментарий установлен в папке /STM32Toolchain на жестком диске (то есть в директории STM32Toolchain внутри вашей Домашней папки). Вы можете разместить его в другом месте, но соответственно организуйте пути в инструкциях.
2.3.1.Linux – Установка библиотек среды выполнения i386 на 64-разрядную ОС Ubuntu
21 В оригинале нарушена нумерация. При переводе нумерация рисунков и таблиц в данной главе была расставлена верно. Возможно, в будущих пересмотрах оригинала книги автор исправит ее. (прим. перевод-
чика)

Установка инструментария |
64 |
Если ваша ОС Ubuntu является 64-разрядной версией, вам нужно установить некоторые библиотеки совместимости, которые позволяют запускать 32-разрядные приложения. Для этого просто запустите следующие команды в консоли Linux:
$ sudo dpkg –-add-architecture i386 $ sudo apt-get update
$ sudo apt-get install libc6:i386 libncurses5:i386 libstdc++6:i386
Если у вас есть сомнения по поводу вашего выпуска Ubuntu, вы можете запустить следующую команду в консоли Linux:
$ uname -i
Если результат x86_64, то у вас 64-разрядная машина, иначе 32-разрядная.
2.3.2. Linux – Установка Java
Установка Java 8 под Ubuntu Linux требует глубокого анализа. Настоятельно рекомендуется установить официальный дистрибутив Oracle Java, как показано здесь.
Во-первых, нам нужно добавить репозиторий Java PPA webupd8team22 в нашу систему и установить Oracle Java 8, используя следующий набор команд в консоли Linux:
$ sudo add-apt-repository ppa:webupd8team/java $ sudo apt-get update
$ sudo apt-get install oracle-java8-installer
После успешной установки JDK убедитесь, что все работает хорошо, запустив команду java -version в командной строке:
$ java -version
java version "1.8.0_60"
Java(TM) SE Runtime Environment (build 1.8.0_60-b27)
Java HotSpot(TM) 64-Bit Server VM (build 25.60-b23, mixed mode)
2.3.3. Linux – Установка Eclipse
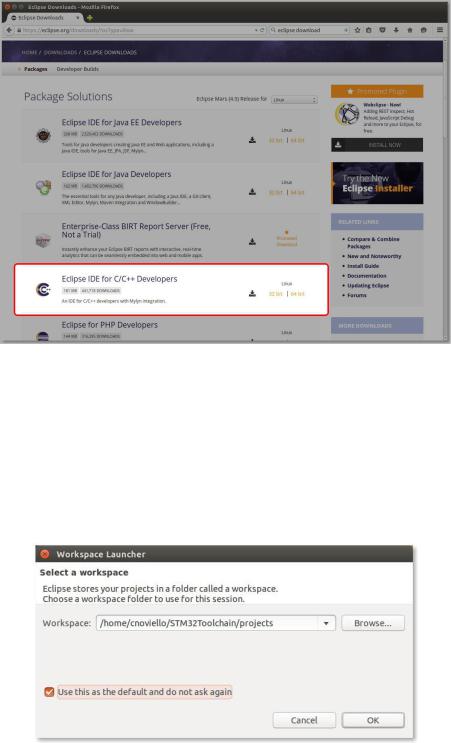
Первым шагом является установка Eclipse IDE. Как было сказано ранее, нас интересует версия Eclipse для разработчиков на C/C++ (Eclipse IDE for C/C++ Developers). Последней версией на момент пересмотра данной главы (август 2018 года) является Photon (Eclipse v4.8). Тем не менее, настоятельно рекомендуется использовать предыдущую версию, то есть Oxygen.3a (Eclipse v4.7.3a), поскольку новейшая версия до сих пор не поддерживается набором плагинов GNU MCU Eclipse plug-ins и некоторыми другими инструментами, используемыми в данной книге. Ее можно загрузить с офи-
циальной страницы загрузки23, как показано на рисунке 1224.
22К сожалению, с недавнего времени репозиторий от webupd8team перестал работать, поэтому единственный рабочий способ получить необходимую версию Java – скачать ее с официального сайта, пройдя реги-
страцию. (прим. переводчика)
23https://www.eclipse.org/downloads/packages/release/oxygen/3a/
24Некоторые скриншоты могут отличаться от описанных в данной книге. Это происходит потому, что Eclipse IDE часто обновляется. Не беспокойтесь об этом: инструкции по установке должны работать в любом случае.
Установка инструментария |
65 |
Рисунок 12: Страница загрузки Eclipse
Eclipse IDE распространяется в виде архива .tar.gz. Извлеките содержимое архива как есть в папку /STM32Toolchain. В конце процесса вы найдете папку
/STM32Toolchain/eclipse, содержащую всю среду IDE.
Теперь мы можем впервые запустить Eclipse IDE. Перейдите в папку/STM32Toolchain/eclipse и запустите файл eclipse. Через некоторое время Eclipse запросит у вас предпочитаемую папку для хранения всех проектов Eclipse (она называется
рабочим пространством, workspace), как показано на рисунке 13.
Рисунок 13: Настройка рабочего пространства Eclipse
Вы можете выбрать предпочитаемую папку или оставить предложенную. В данной книге мы будем предполагать, что рабочее пространство Eclipse находится в папке/STM32Toolchain/projects. Переорганизуйте инструкции соответствующим образом, если вы выберете другое место
2.3.4. Linux – Установка плагинов Eclipse
После запуска Eclipse мы можем приступить к установке некоторых необходимых плагинов.
Установка инструментария |
66 |
Что такое плагин?
Плагин (подключаемый модуль) – это внешний программный модуль, который расширяет функциональные возможности Eclipse. Плагин должен соответствовать стандартному API-интерфейсу, определенному разработчиками Eclipse. Таким образом, сторонние разработчики могут добавлять функции в IDE без изменения основного исходного кода. В данной книге мы установим несколько плагинов, чтобы адаптировать Eclipse к нашим потребностям.
Первый плагин, который нам нужно установить, – это C/C++ Development Tools SDK, также известный как Eclipse CDT, или просто CDT. CDT предоставляет полностью функ-
циональную интегрированную среду разработки (IDE) на C и C++, основанную на плат-
форме Eclipse. Возможности включают в себя: поддержку создания проектов и управляемую сборку для различных инструментариев, стандартную make-сборку, навигацию по файлам с исходным кодом, различные инструменты управления знаниями исходного кода (source knowledge tools), такие как иерархия типов, граф вызовов, включает браузер, браузер определения макросов, редактор кода с подсветкой синтаксиса, сворачиванием и навигацией по гиперссылкам, реорганизацию исходного кода и генерацию кода, визуальные средства отладки, включая память, регистры и средства просмотра дизассемблирования.
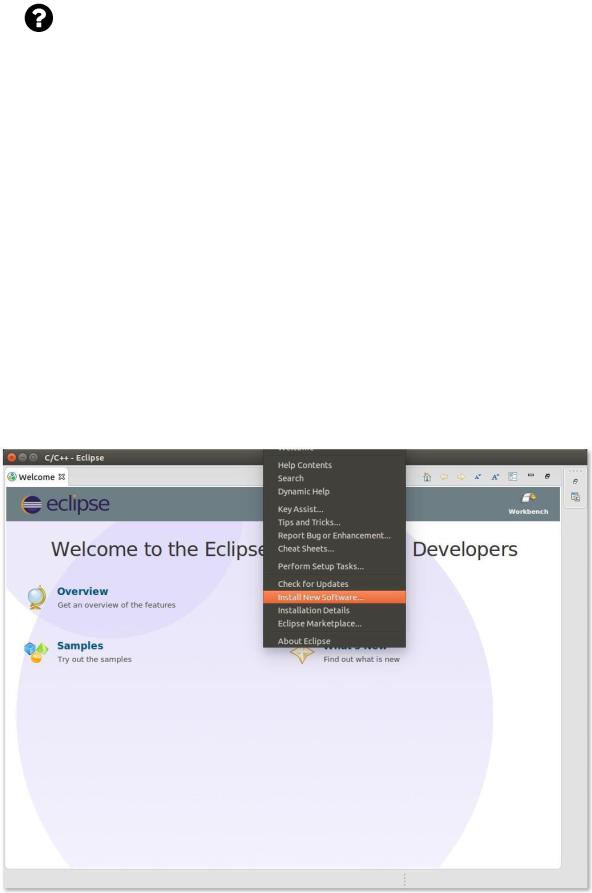
Чтобы установить CDT, мы должны следовать данной процедуре. Перейдите в Help → Install new software…, как показано на рисунке 14.
Рисунок 14: Меню установки плагинов Eclipse
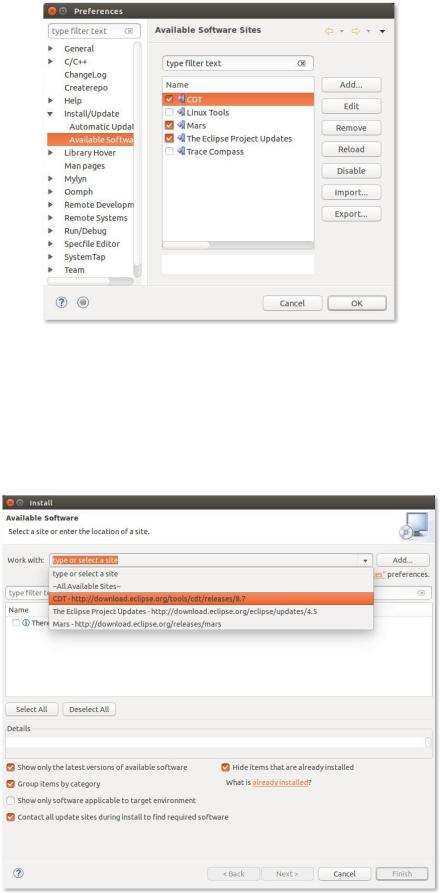
В окне установки плагинов нам нужно включить другие репозитории плагинов, нажав кнопку Manage…. В окне Preferences выберите пункт «Install/Update → Available Software
Установка инструментария |
67 |
Sites» слева, а затем установите флажок на пункте «CDT», как показано на рисунке 15. Нажмите кнопку OK.
Рисунок 15. Выбор репозитория плагинов Eclipse.
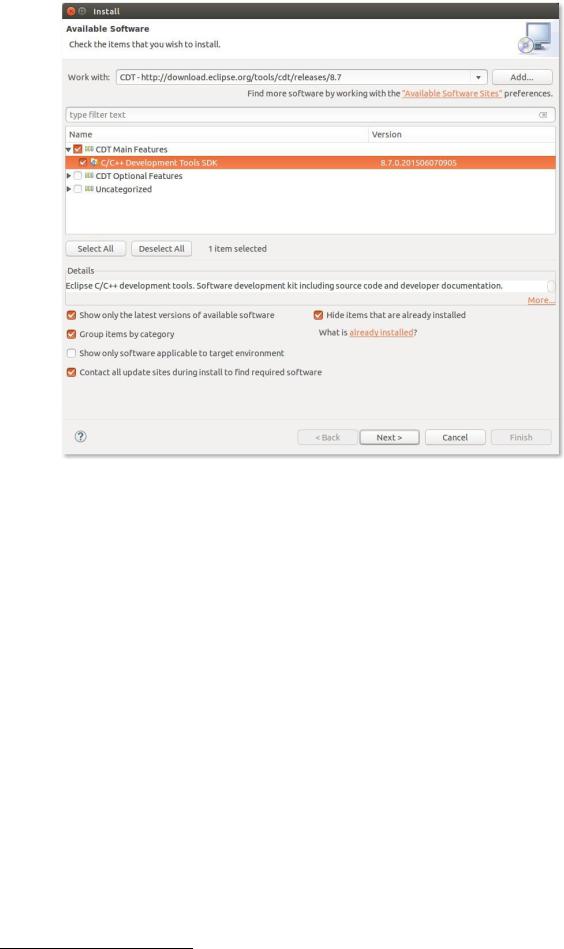
Теперь из выпадающего списка «work with» выберите репозиторий «CDT», как показано на рисунке 16, а затем отметьте пункты «CDT Main Features → C/C++ Development Tools» и «CDT Optional Features → C/C++ GDB Hardware Debugging», как показано на рисунке 17.
Нажмите кнопку «Next» и следуйте инструкциям по установке плагина. В конце процесса установки (установка занимает некоторое время в зависимости от скорости вашего интернет-соединения), по запросу перезапустите Eclipse.
Рисунок 16: Выбор репозитория CDT
Установка инструментария |
68 |
Рисунок 17: Выбор плагина CDT
Теперь нам нужно установить плагины GNU MCU для Eclipse25. Эти плагины добавляют Eclipse CDT богатый набор функций для взаимодействия с инструментарием GCC ARM. Более того, они предоставляют специфические функции для платформы STM32. Плагины разрабатываются и поддерживаются Ливиу Ионеску (Liviu Ionescu), который отлично справился с задачей поддержки инструментария GCC ARM. Без данных плагинов практически невозможно разработать и запустить код с Eclipse для платформы STM32.
Для установки плагинов GCC ARM перейдите в Help → Install new software…. В окне Install нажмите кнопку Add… и заполните поля следующим образом (см. рисунок 18):
Name: GNU MCU Eclipse Plug-ins
Location: http://gnu-mcu-eclipse.netlify.com/v4-neon-updates
Нажмите кнопку ОК. Теперь из выпадающего списка «work with» выберите репозиторий «GNU MCU Eclipse Plug-ins». Появится список устанавливаемых пакетов. Проверьте пакеты для установки в соответствии с рисунком 19.
25 https://gnu-mcu-eclipse.github.io/

Установка инструментария |
69 |
Рисунок 18: Установка плагинов GNU MCU
Рисунок 19: Выбор плагинов GNU MCU
Нажмите кнопку «Next >» и следуйте инструкциям по установке плагинов. В конце процесса установки по запросу перезапустите Eclipse.
Прочитайте внимательно
Если вы столкнулись с проблемами во время установки плагинов (ошибка handshake error, ошибка provisioning error или что-то в этом роде), обратитесь к разделу устранения неполадок.
Eclipse теперь, по существу, настроена на разработку приложений STM32. Теперь нам нужен набор кросс-компиляторов для генерации микропрограммы для семейства
STM32.