При косых зубьях в формулу коэффициента потерь мощности подставляется эквивалентное число зубьев zv.
Полная величина коэффициента потерь для механизма с цилиндрическими колесами 7-го и 8-го классов точности ψ = 0,015…0,020, с коническими колесами ψ = 0,02…0,03, с колесами 6-го класса точности ψ = 0,01
и ψ = 0,02.
Потери холостого хода остаются такими же.
В многоступенчатом механизме коэффициент полезного действия равен произведению КПД ступеней, так как они соединены последовательно.
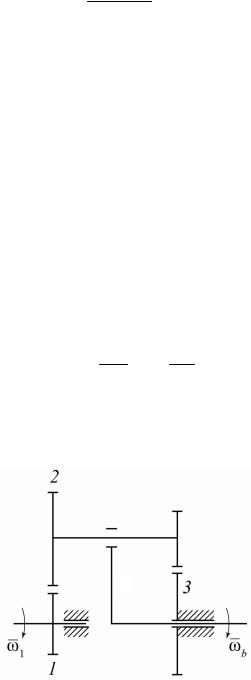
Мощность сил трения в подшипниках
NT1 NT2 MT1 1 MT2 2 . Мощность, затраченная на трение скольжения зубьев,
Nтз FтсVск ,
где Fтс – сила трения скольжения, Fтс fR12 , a R12 – сила реакции зубьев. Скорость скольжения переменна по величине и знаку
Vск 1 2 Pk ,
где ω1, ω2 – угловые скорости колес; Pk – расстояние от полюса зацепления до точки касания зубьев, определяется по чертежу.
12.3. Коэффициент полезного действия системы механизмов
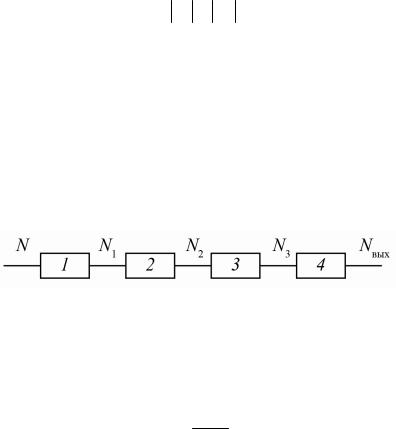
При последовательном соединении (рис. 12.2) мощность, подведенная к каждому из механизмов, теряется на преодоление сил вредных сопротивлений в нем. К последующему k + 1 механизму подводится мощность.
Рис. 12.2. Схема последовательного соединения механизмов
Nk Nk 1 k .
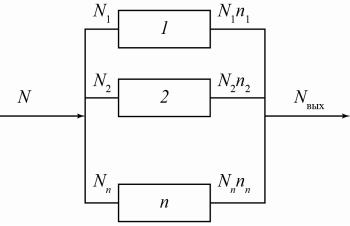
Коэффициент полезного действия всего механизма
NNвых .