

книги / Теория механизмов и механика систем машин
..pdfское обоснование метода можно найти в учебниках по теории механизмов и машин И.И. Артоболевского и др. Для решения задачи нужно построить графики перемещения и первой производной от перемещения по углу пово-
рота. График второй производной d 2S d 2 необходим для динамического анализа механизма. Графики S f и dS
d 2 необходим для динамического анализа механизма. Графики S f и dS d f имеют один масштаб.
d f имеют один масштаб.
Определение минимального радиуса кулачка рассмотрим на примерах.
Определение минимальных размеров кулачкового механизма с поступательно движущимся толкателем
Для решения поставленной задачи должны быть заданы: закон движения ведомого звена, минимальный угол передачи, фазовые углы или циклограмма, максимальный ход толкателя γmin.
Вначале строим графики перемещений и первой производной перемещения по углу поворота. Если второй график dS d f строится гра-
d f строится гра-
фическим дифференцированием, то величину полюсного расстояния Н нужно вычислить исходя из условия равенства масштабов:
|
S |
|
dS /d |
, но |
dS /d |
|
|
|
S |
. |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
H |
1 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Решаем совместно оба этих уравнения: |
S |
|
|
|
S |
|
, откуда H |
1 |
|
1 |
. |
||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
H |
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
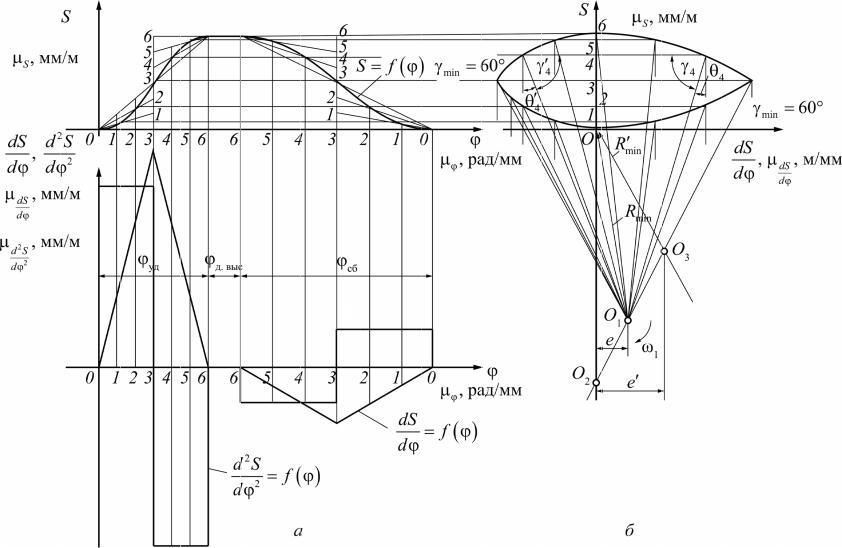
В нашем примере (рис. 6.16) закон движения взят параболический; минимальный угол передачи; заданы фазовые углы уд, д.выс, сб min 60 .
Построение графиков S f и dS d f производим методом графического дифференцирования, причем графики S f и dS
d f производим методом графического дифференцирования, причем графики S f и dS d
d
f строим в одном масштабе. Величина полюсного расстояния H1 1 .
График d 2S d 2 f построен в другом масштабе (см. рис. 6.16, а).
d 2 f построен в другом масштабе (см. рис. 6.16, а).
После построения вышеназванных графиков переходим к построению совмещенного графика S f dS d двумя способами.
d двумя способами.
Первый способ показан на рис. 6.16, б. Ось поворота проведена под углом 45°. Суть построения заключается в исключении аргумента φ из функций S f и dS d f . Каждому углу поворота соответствует ордината
d f . Каждому углу поворота соответствует ордината
перемещения и ордината первой производной. Эти ординаты и являются в дальнейшем координатами совмещенного графика, причем по оси абсцисс х откладываются ординаты первой производной, а по оси y – перемещение.
131
132
Рис. 6.16. Определение минимальных размеров кулачкового механизма:
à — диаграммы движения толкателя; á — совмещенный график зависимостей S = f(dS/d)
Второй способ связан с вычислением отрезков S, dS  d , по которым,
d , по которым,
как по координатам, в дальнейшем строится совмещенный график. В нашем примере вычисленные отрезки приведены в табл. 6.2 в масштабе μS. Значения S и dS d взяты в отрезках, которые в дальнейшем служат координа-
d взяты в отрезках, которые в дальнейшем служат координа-
тами при построении графика. На фазе удаления имеем положительные значения dS d уд, а на фазе сближения – отрицательные значения dS
d уд, а на фазе сближения – отрицательные значения dS d с.
d с.
При построении совмещенного графика S f dS d по данным, при-
d по данным, при-
веденным в табл. 6.2, при вращении кулачка по часовой стрелке следует через соответствующие положения центра ролика 1, 2, 3, 4… и т.д. провести линии, перпендикулярные направлению его движения, и отложить вправо отрезки dS d уд для фазы удаления, а влево отрезки dS
d уд для фазы удаления, а влево отрезки dS d с для фазы сближения.
d с для фазы сближения.
Таблица 6 . 2 Амплитуды перемещения и аналога скорости толкателя
Номер |
S |
dS d |
|
положения |
|||
|
|
||
0 |
0 |
0 |
|
1 |
1 |
20 |
|
2 |
5 |
41 |
|
3 |
12 |
61 |
|
4 |
22 |
83 |
|
5 |
32 |
61 |
|
6 |
38 |
41 |
|
7 |
42 |
20 |
|
8 |
44 |
0 |
|
9 |
44 |
0 |
|
10 |
43 |
–5 |
Номер |
S |
dS d |
|
положения |
|||
|
|
||
11 |
41 |
–10 |
|
12 |
38 |
–15 |
|
13 |
34 |
–20 |
|
14 |
28 |
–25 |
|
15 |
22 |
–30 |
|
16 |
16 |
–25 |
|
17 |
10 |
–20 |
|
18 |
5 |
–15 |
|
19 |
2 |
–10 |
|
20 |
1 |
–5 |
|
21 |
0 |
0 |
При вращении кулачка против направления вращения часовой стрелки отрезки dS d уд на фазе удаления откладываются влево от соответствую-
d уд на фазе удаления откладываются влево от соответствую-
щих положений центра ролика, а отрезки |
dS d сб на фазе сближения – |
||||
вправо. Если масштабы |
диаграммы |
перемещения и диаграммы |
|||
dS d f разные, то отрезки следует определить по формуле |
|||||
X |
dS d |
YdS d dS d , |
|||
|
|
S |
|
|
|
|
|
|
|
|
|
где YdS d – ординаты величин dS d .
d .
133
Все точки совмещенного графика S f dS d соединяем плавной
d соединяем плавной
кривой. К полученной кривой проводим справа и слева касательные под углом γmin к оси dS d и находим точку О1 их пересечения (см. рис. 6.16, б).
d и находим точку О1 их пересечения (см. рис. 6.16, б).
Касательные после пересечения ограничивают область, в которой любая точка может быть принята за центр вращения кулачка. На рис. 6.16, б за центр вращения кулачка взята точка О1.
Если из выбранного центра вращения кулачка проведем прямую через любую точку совмещенного графика, то острый угол между этой прямой и горизонталью, проведенной через эту точку, дает угол передачи движения, который будет больше минимального угла передачи движения.
Таким образом, центр вращения выбран верно, и основное условие, чтобы угол передачи движения не был меньше допустимого, выполнено для каждой фазы движения.
Соединив точку О1 с началом координат О совмещенного графика (см. рис. 6.16, б), получим отрезок О1О, изображающий минимальный радиус кулачка Rmin в масштабе перемещения μS. Расстояние от выбранного центра вращения кулачка до оси перемещения называется эксцентриситетом е (смещением).
Кулачковый механизм со смещением имеет меньший Rmin, чем центральный механизм. В этом нетрудно убедиться, если сравнить отрезки
О1О и О2О, изображающие Rmin в том и другом случае (см. рис. 6.16, б): О1О < О2О (отрезок О2О изображает Rmin для центрального кулачкового ме-
ханизма). Следовательно, габариты в целом кулачкового механизма со смещением в данном случае будут меньше.
Если кулачок одностороннего вращения, то движение толкателя на фазе сближения совершается под действием пружины или собственного веса. Для этого периода работы угол передачи не имеет решающего значения, как при подъеме, поэтому может быть допущен угол, значительно меньший γmin.
В этом случае область, где можно расположить центр вращения кулачка, определяем следующим образом. Проводим касательную только к кривой S f dS d на фазе сближения. Затем проводим луч под углом γmin
d на фазе сближения. Затем проводим луч под углом γmin
из начала координат на фазе удаления. Точка О3 пересечения касательной и луча определяет центр вращения кулачка одностороннего действия.
На рис. 6.15, б расстояние ОО3 является Rmin' . Следовательно, центр враще-
ния кулачка можно выбрать в точке О3, что позволит уменьшить минимальный радиус, а следовательно, и габариты кулачкового механизма.
При этом необходимо выбирать точку О3 так, чтобы угол передачи был не менее γmin в пределах фазы удаления.
134
Некоторое уменьшение углов γ на фазе сближения при одностороннем вращении кулачка никак не отразится на работе кулачкового механизма.
Смещение e' толкателя в этом случае увеличилось. Следовательно, за счет соответствующего выбора смещения можно уменьшить размеры кулачковой шайбы.
6.5. Построение профиля кулачка
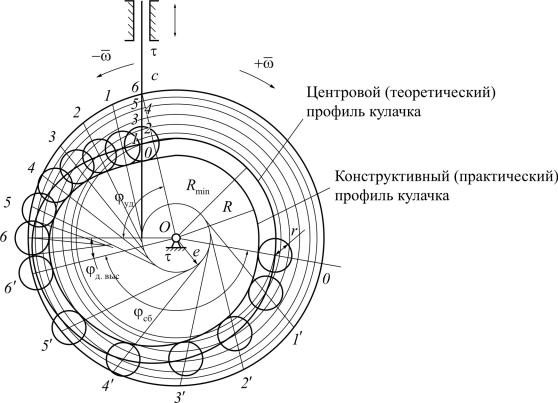
При построении профиля кулачка масштаб выбирают, принимая во внимание лишь свободное поле чертежа. Из произвольной точки О1 (рис. 6.17) проводят окружность радиусом е. К полученной окружности проводят касательную τ–τ, которая будет осью толкателя. Затем из точки О1 радиусом Rmin вычерчивают окружность, пересечение ее с касательной τ–τ дает нижнее положение конца толкателя. На оси движения толкателя от точки нижнего положения О откладывают вверх перемещения толкателя, взятые из графиков S f для фазы удаления и сближения.
Рис. 6.17. Профилирование кулачка
Полученные точки отмечают цифрами, соответствующими повороту кулачка. Наиболее удаленную точку соединяют с осью вращения кулачка О1 и этим радиусом проводят окружность, на которой откладывают фазовые
135
углы. Началом отсчета для фазовых углов служит радиус О1C, отсчет ведется против движения кулачка. Дуги окружности радиусом О1C, соответствующие фазовым углам удаления и сближения, делят на равное число частей (как на графике перемещения разделены фазовые углы).
Через точки деления проводят касательные к окружности радиусом е (см. рис. 6.17). Затем из центра вращения кулачка О1 проводят дуги радиусом О11; О12; О13 и т.д. до пересечения с соответствующими касательными.
Точки пересечения дают положения конца толкателя в обращенном движении. Соединив эти точки плавной кривой, получим центровой профиль кулачка.
6.6. Определение размеров ролика толкателя
Для уменьшения износа профиля кулачка и потерь на трение толкатель снабжают роликом. Размер ролика r выбирают из условия выполнения закона движения (чтобы не получить заострение практического профиля кулачка): rp 0,8 min , где min – минимальный радиус кривизны профиля ку-
лачка на выпуклой части, и из условия конструктивности: rp 0,4Rmin , где Rmin – минимальный радиус профиля кулачка.
Участки теоретического профиля кулачка с наименьшим min опреде-
ляют визуально. Затем для этих участков (или одного участка на рис. 6.17) находят центр среднего круга кривизны, проходящего через три близлежащие точки. Средний круг кривизны можно определить и с помощью хорд, соединяющих соседние точки со средней точкой. Через середины каждой из хорд проводят перпендикуляры и находят их пересечение. В точке их пересечения будет находиться центр кривизны. Окончательно радиус ролика берется меньший из двух вычисленных по формулам
rp 0,8 min , rp 0,4Rmin .
Для вычерчивания практического профиля нужно провести ряд окружностей радиусом ролика с центрами на теоретическом профиле, и огибающая этих окружностей будет практическим профилем кулачка.
6.7. Определение минимальных размеров кулачка с коромыслом
Для решения этой задачи задаются: закон движения, минимальный угол передачи движения min , циклограмма или фазовые углы, длина коро-
мысла l и максимальный угол качания коромысла max .
136

Порядок расчета напоминает порядок расчета минимальных размеров кулачка с поступательно движущимся толкателем.
Вначале строят графики перемещения, первой и второй производной перемещения по углу поворота кулачка. Перемещение можно выразить в угловых единицах или в линейных, закон движения при этом не изменится, так как Smax l max , где Smax – максимальный дуговой путь конца коромыс-
ла, l – длина коромысла, величина постоянная; max – угол качания коро-
мысла, рад.
Графики перемещения и первой производной перемещения по углу поворота кулачка строят в одинаковых масштабах. Метод построения остается прежним.
Строят совмещенный график. Для этого из произвольно взятой точки С (рис. 6.18) радиусом B0C l / l ( l – масштаб для определения параметров
кулачка) проводят дугу B0 D и соединяют точку B0 с точкой С.
Рис. 6.18. Совмещенный график перемещения кулачка с коромыслом
137
Далее от точки B0 по этой дуге откладывают с графика перемещения соответствующие отрезки S2 l 2 , где l – длина коромысла, β2 – угол кача-
ния коромысла.
Полученные точки B0; 2; 3; 4 и т.д. представляют положения центра коромысла, соответствующие заданным углам поворота кулачка.
Для определения центра O1 вращения кулачка необходимо на лучах CB0, CB1, CB2 и т.д. отложить отрезки dS / d в масштабе S . При этом
следует придерживаться следующего правила: при вращении кулачка и коромысла в одном направлении на фазе удаления отрезки dS / d уд отклады-
ваются по соответствующим лучам от дуги радиусом B0C в направлении C, а отрезки dS / d сб на фазе сближения – в сторону, противоположную точке
С. При вращении кулачка и коромысла в противоположных направлениях (см. рис. 6.18) отрезки dS / d уд откладываются от дуги радиусом B0C в
сторону, |
противоположную центру С вращения коромысла, а отрезки |
dS / d сб |
– в сторону точки С. |
В результате получают точки B0, B1 и т.д. Через эти точки проводят прямые под углом γmin к соответствующим лучам. Область, ограниченная этими прямыми (на рис. 6.18 она заштрихована), может рассматриваться как поле возможных центров вращения кулачка. Причем для любой точки поля будет выполняться условие, что во время работы кулачка угол передачи γ на всех фазах не будет меньше γmin. На рис. 6.18 за центр вращения кулачка взята точка O1. Расстояние O1B0 дает величину в масштабе S l .
Расстояние aw = O1C называется межосевым Rmin.
Построение профиля кулачка показано на рис. 6.19. Из произвольной точки O1 проводят окружность радиусом O1C0. Масштаб построения профиля может быть сохранен или взят другим, тогда новый масштаб
S |
l |
|
(O1C) S , |
1 |
1 |
|
O1C0 |
|
|
||
где (O1C) S – осевое расстояние |
(истинное), определяемое согласно |
||
рис. 6.18; O1С0 – отрезок, изображающий осевое расстояние в новом масштабе l1 построения профиля (см. рис. 6.19).
На этой окружности от точки C0 в сторону, противоположную вращению кулачка, откладывают фазовые углы, которые, в свою очередь, делят на соответствующее число равных частей, как и на графике перемещения. На рис. 6.19 деление нанесено через одно: 0, 2, 4 и т.д. Из точки O1 радиусом Rmin проводят окружность, а из точки C0 радиусом, равным длине коро-
138
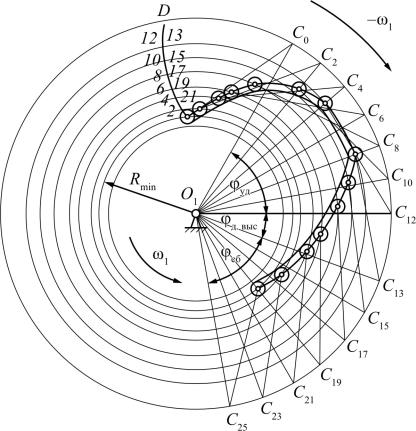
мысла B0C0, – дугу, на которой откладывают дуговой путь согласно графику перемещений. Полученные точки дают положения коромысла при повороте кулачка на соответствующий угол. Из точки O1 как из центра проводят окружности через точки деления дуги B0D. Из точек C1; C2 и т.д. циркулем делают засечки на соответствующих окружностях радиусом B0C0. Полученные таким образом точки принадлежат центровому профилю кулачка. Соединив их плавной кривой, получают центровой профиль.
Рис. 6.19. Построение профиля кулачка с коромыслом
Радиус ролика и конструктивный (практический) профиль кулачка определяется так же, как и для кулачкового механизма с поступательно движущимся толкателем.
6.8.Определение минимальных размеров кулачка
сплоским толкателем
Метод «Задача Геронимуса»
Если толкатель оканчивается плоскостью, то, очевидно, угол передачи остается постоянным во время работы механизма. В нашем случае (рис. 6.20) этот угол γ12 = 90°, мы получаем наивыгоднейшие с точки зрения углов передачи условия работы кулачкового механизма.
139
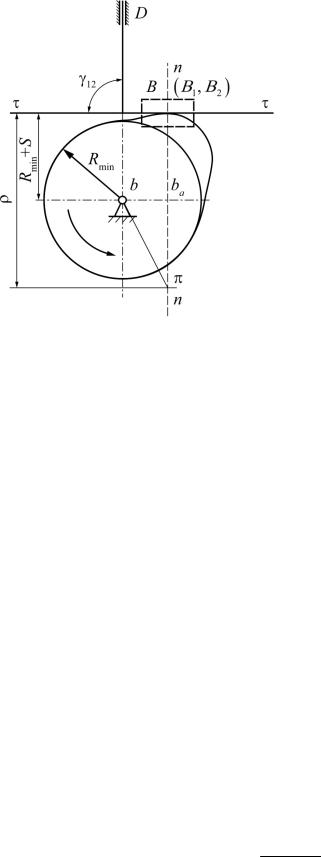
Рис. 6.20. Кулачковый механизм с плоским толкателем
Но для таких типов кулачков должно выполняться условие, чтобы контур кулачка был всегда выпуклым. Для этого необходимо, чтобы
Rmin S d 2S .
d 2
Это условие вытекает из следующих соображений (см. рис. 6.20). Строим заменяющий механизм и план ускорений с полюсом π. Отрезок πb в
масштабе 12 дает модуль ускорения aB1 . Отрезок πbα представляет собой
аналог ускорения в точке контакта B (точка B1 принадлежит кулачку, а B2 – толкателю) кулачка и толкателя в данный момент:
a |
|
2 |
) |
d 2S |
|
d 2S |
2 |
||
B2 |
|
( b |
dt2 |
d 2 |
. |
||||
|
1 |
|
|
|
|
1 |
|||
Так как ω1 = const, то |
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
d 2S |
. |
|
|
|
|
|
|
d 2 |
|
|
|||
|
|
|
|
|
|
|
|
||
Следовательно, радиус кривизны профиля в точке соприкосновенияRmin S d 2S / d 2. Во всех случаях должно быть р > 0 или
Rmin S d 2S 0,
d 2
следовательно, |
R S |
d 2S |
. |
(6.1) |
|
min |
d 2 |
|
|
|
|
|
|
Разделимлевуюиправуючастивыражения(6.1) на Rmin S , получим
d 2S d 2
Rmin S 1
140