

ФГБОУ ВПО
«Воронежский государственный технический университет»
Н.С. Переславцева
Н.П. Бестужева
теория колебаний
и теория удара
Утверждено Редакционно-издательским советом
университета в качестве учебного пособия
Воронеж 2013
УДК 531.8
Теория колебаний и теория удара: учеб. пособие / Н.С. Переславцева, Н.П. Бестужева. – Воронеж: ФГБОУ ВПО «Воронежский государственный технический университет», 2013. – 121 с.
В работе изложены основные понятия разделов теории колебания и теории удара теоретической механики.
Издание соответствует требованиям Федерального государственного образовательного стандарта высшего профессионального образования по направлениям подготовки бакалавров 110800 «Агроинженерия» (профиль «Электроснабжение и электрооборудование сельскохозяйственных предприятий»), 140400 «Электроэнергетика и электромеханика» (профили «Электромеханика», «Электропривод и автоматика»), дисциплине «Теоретическая механика».
Учебное пособие подготовлено в электронном виде в текстовом редакторе MS WORD и содержится в файле ТПМ-Главы-Динамики.document.
Ил. 27. Библиогр.: 4 назв.
Рецензенты: кафедра теоретической и прикладной механики Воронежского государственного университета (зав. кафедрой д-р физ.-мат. наук, проф. А.Н. Спорыхин);
д-р физ.-мат. наук, проф. М.А. Артёмов
© Переславцева Н.С., Бестужева Н.П., 2013
© Оформление. ФГБОУ ВПО
«Воронежский государственный технический университет», 2013
Введение
В теоретической механике изучаются механические движения вещественных форм материальных объектов в пространстве с течением времени.
Теоретическая механика делится на три части: статику, кинематику и динамику. В данном учебном пособии кратко изложены основные положения и понятия двух значительных глав динамики: теории колебания и теории удара.
Теория колебаний механических систем – один из самых обширных и развитых разделов теоретической механики, имеющий большое прикладное значение.
Колебательные движения встречаются во многих отраслях современной науки и техники и требуют дл рассмотрения широкого использования различных математических методов.
Ударные явления встречаются различные по характеру. В простейших случаях удар проявляется как почти мгновенное наложение или снятие связей. Примером удара, связанного с мгновенным наложением связей, может служить столкновение поступательно движущегося тела с другим, например неподвижным, телом. Удар, обусловленный мгновенным снятием связей или их разрушением, можно представить как отрыв части тела при его быстром вращении вокруг оси и т.п. Могут быть ударные явления более сложного характера, связанные, например, с периодическим наложением и снятием связей (ковка, штамповка и др.).
Изучение этих разделов имеет большое значение как в плане практических применений полученных знаний и навыков, так и в качестве необходимой базы для изучения целого ряда дисциплин, предусмотренных учебной программой.
1. Теория колебаний
Рассмотрим основные свойства малых колебаний механических систем с одной и двумя степенями свободы на основе применения уравнений Лагранжа; некоторые результаты для системы с любым конечным числом степеней свободы приведем без вывода. Механическая система может совершать малые колебания только вблизи устойчивого положения равновесия. Обобщенные координаты системы в положении равновесия принимают равными нулю, т.е. отсчитывают их от положения равновесия. Тогда колебательным движением механической системы в общем случае считают всякое ее движение, при котором все обобщенные координаты или часть из них изменяется не монотонно, а имеют колебательный характер, т.е. принимают нулевые значения по крайне мере несколько раз.
Ниже рассмотрены только периодические и псевдопериодические колебания.
Для рассмотрения малых колебаний следует дать определения устойчивости положения равновесия системы и становить условия, при выполнении которых положение равновесия является устойчивым.
1.1. Устойчивость положения равновесия
1.1.1. Определение устойчивости положения равновесия
Для
наглядности рассмотрим положение
равновесия на примере одного твердого
тела. Пусть таким телом является стержень
(рис. 1) с горизонтальной осью вращения,
проходящей через точку
![]() .
Стержень имеет два положения равновесия
при
.
Стержень имеет два положения равновесия
при
![]() и
и
![]() .
В положении равновесия силы, приложенные
к стержню, составляют уравновешенную
систему сил.
.
В положении равновесия силы, приложенные
к стержню, составляют уравновешенную
систему сил.
Чтобы
установить, будет ли рассматриваемое
положение равновесия стержня устойчивым,
следует дать с
а) б)
в)
Рис. 1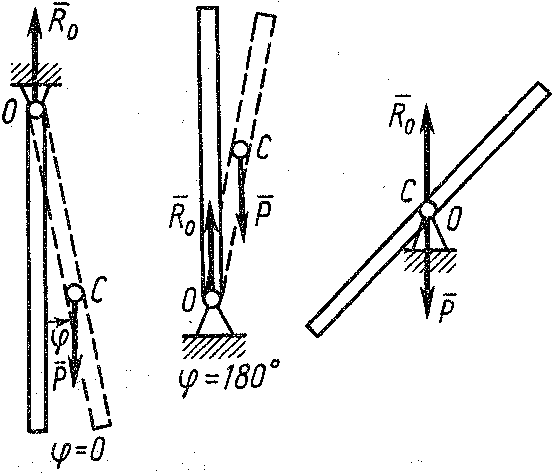 тержню
достаточно малое начальное отклонение
от положения равновесия, а в общем случае
сообщить ему еще достаточно малую
начальную угловую скорость и рассмотреть
его последующее движение. Для простоты
ограничимся только одним малым начальным
о
тержню
достаточно малое начальное отклонение
от положения равновесия, а в общем случае
сообщить ему еще достаточно малую
начальную угловую скорость и рассмотреть
его последующее движение. Для простоты
ограничимся только одним малым начальным
о
Если существует такое достаточно малое начальное отклонение стержня от положения равновесия, при котором силы стремятся вернуть стержень в положение равновесия, то такое положение равновесия считается устойчивым.
Положение равновесия стержня при (рис. 1, а) является устойчивым, так как при начальном его отклонении на малый угол силы, действующие на стержень, стремятся вернуть его в положение равновесия.
В том случае, когда силы еще дальше отклоняют стержень от положения равновесия, положение равновесия является неустойчивым.
Положение равновесия стержня при может служить примером неустойчивого положения равновесия (рис. 1, б). Силы, действующие на стержень, в этом случае стремятся отклонить его еще дальше от положения равновесия при любом как угодно малом начальном его отклонении от положения равновесия.
Если стержень, получив любое малое начальное отклонение от положения равновесия, остается в равновесии в новом отклоненном положении, то такое положение равновесия называется безразличным.
Примером
безразличного положения равновесия
может служить равновесие стержня, у
которого закреплена точка
совпадает с центом масс
![]() .
В этом случае силы, приложенные к стержню,
образуют равновесную систему сил при
любом начальном его отклонении от
первоначального положения равновесия
(рис. 1, в).
.
В этом случае силы, приложенные к стержню,
образуют равновесную систему сил при
любом начальном его отклонении от
первоначального положения равновесия
(рис. 1, в).
В общем случае кроме начального отклонения стержню следует сообщить также еще и некоторую достаточно малую начальную угловую скорость. Естественно, что тогда случайно безразличного положения равновесия стержня следует отнести к неустойчивому положению равновесия, так как, получив любую малую начальную угловую скорость, стержень дальше будет удаляться с этой угловой скоростью по инерции от своего первоначального положения равновесия.
Все изложенное о положении равновесия стрежня характерно не только для любого твердого тела, но и для любой механической системы. Наибольший интерес представляет устойчивое положение равновесия тела или механической системы, так как в таком положении равновесия тело или система могут находить длительно, если им не сообщать какое-либо возмущение.
При устойчивом положении равновесия система, выведенная из положения равновесия достаточно малыми возмущениями в виде начальных отклонений и скоростей, которые сообщаются всем точкам системы или их части, совершает колебания около положения равновесия или приближается к нему без колебания.
При неустойчивом положении равновесия случайные возмущения приводят к тому, что система при дальнейшем движении все дальше отклоняется от положения равновесия. Таким образом, прежде всего необходимо установит характер положения равновесия системы. Для этого требуется ввести точное понятие устойчивости положения равновесия системы.
Строгое
определение понятия устойчивости
положения равновесия было дано в работах
А.М. Ляпунова. Приведем это определение
для системы с любым конечным числом
степеней свободны
![]() .
.
Условимся обобщенные
координаты
![]() отсчитывать
от положения равновесия системы, т.е.
принимать их равными нулю в положении
равновесия. Начальное возмущение системы
состоит в общем случае из начальных
значений обобщенных координат
отсчитывать
от положения равновесия системы, т.е.
принимать их равными нулю в положении
равновесия. Начальное возмущение системы
состоит в общем случае из начальных
значений обобщенных координат
![]() ,
,
![]() ,…,
,…,
![]() и начальных обобщенных скоростей
и начальных обобщенных скоростей
![]() ,
,
![]() ,…,
,…,
![]() .
.
По Ляпунову,
равновесие
системы называется устойчивым, если
для любого достаточно малого![]() можно выбрать
два других таких малых числа
можно выбрать
два других таких малых числа
![]() и
и
![]() ,
что при
удовлетворении начальным значениям
обобщенных координат и скоростей
неравенства
,
что при
удовлетворении начальным значениям
обобщенных координат и скоростей
неравенства
![]() ,
,
![]() в любой момент
времени все обобщенные координаты
подчиняются условиям
в любой момент
времени все обобщенные координаты
подчиняются условиям
![]() .
.
Таким образом, по
Ляпунову, положение равновесия считается
устойчивым, если можно задать достаточно
малую область изменения начальных
значений обобщенных координат в
окрестности положения равновесия и
область начальных обобщенных скоростей,
для которых величина обобщенных координат
при последующем движении системы
ограничены заданной
![]() окрестностью вблизи положения равновесия.
Ясно, что области начальных значений
окрестностью вблизи положения равновесия.
Ясно, что области начальных значений
![]() и
и
![]() ,
определяемые положительными числами
,
определяемые положительными числами
![]() и
и
![]() ,
зависят от выбранной
-окрестности,
т.е. самого числа
.
Эти области начальных значений
,
зависят от выбранной
-окрестности,
т.е. самого числа
.
Эти области начальных значений
![]() и
и
![]() не должны соответствовать
не должны соответствовать
![]() и
и
![]() ,
т.е. только самому положению равновесия,
для которого
,
т.е. только самому положению равновесия,
для которого
![]() и
и
![]() .
.
В положении
равновесия механической системы каждая
обобщенная сила
![]() равна нулю. Для случая потенциального
силового поля обобщенные силы через
потенциальную энергию вычисляют по
формулам
равна нулю. Для случая потенциального
силового поля обобщенные силы через
потенциальную энергию вычисляют по
формулам
![]() ,
,
![]() .
.
Следовательно, в
положении любого равновесия
![]() ,
поэтому потенциальная энергия при этом
может достигать своего экстремального
значения.
,
поэтому потенциальная энергия при этом
может достигать своего экстремального
значения.