

Ю.В. Кириллов
ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебное пособие

Воронеж 2008
ГОУВПО «Воронежский государственный технический университет»
Ю.В. Кириллов
ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
В
УДК 621.582
Кириллов Ю.В. Элементы систем автоматического управления: учеб. пособие/Ю.В. Кириллов. Воронеж: ГОУВПО «Воронежский государственный технический университет», 2008. 303 с.
В учебном пособии рассматриваются основные элементы автоматики: генераторы постоянного тока, управляемые выпрямители, инверторы, ведомые сетью, инверторы напряжения и тока, преобразователи частоты, триггеры, счетчики, аналого-цифровые, цифро-аналоговые преобразователи и др.
Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 140600 «Электротехника, электромеханика и электротехнологии», специальности 140604 «Электропривод и автоматика промышленных установок и технологических комплексов», дисциплине «Элементы систем автоматики».
Материал учебного пособия охватывает широкий круг вопросов автоматики и систем автоматического управления и по содержанию может использоваться при изучении соответствующих разделов курса «Автоматика», «Физические основы электроники», «Типовые элементы и устройства цифровой техники».
Издание предназначено для студентов 4-го курса очной формы обучения.
Учебное пособие подготовлено в электронном виде в текстовом редакторе MS Word XP и содержится в файле Автоматика. rar.
Табл. 11. Ил. 197. Библиогр. 4: назв.
Рецензенты: ОАО «Научно- исследовательский институт полупроводникового машиностроения» (нач. отдела канд. техн. наук В.Г. Махаев),
канд. техн. наук, профессор Д. А. Ефремов
©Кириллов Ю.В., 2008
©Оформление. ГОУВПО «Воронежский государственный технический университет», 2008
ВВЕДЕНИЕ
Автоматизация производственных процессов — применение технических средств и систем управления, освобождающих человека частично или полностью от непосредственного участия в этих процессах. Автоматизация облегчает умственный труд человека, освобождает его от сбора информации, ее обработки, исполнения принятого решения. В системах автоматики получение, передача, преобразование и использование информации осуществляются без непосредственного участия человека.
Для получения информации о ходе производственного процесса применяют элементы автоматики, преобразующие самые разные физические величины (размеры, температуру, давление, расход, скорость, уровень, влажность и т. д.) в некоторый сигнал, удобный для последующей обработки в автоматическом устройстве или ЭВМ. Затем этот сигнал обрабатывается: сравнивается с другими сигналами, анализируются его изменения.
В результате обработки информационных сигналов вырабатываются исполнительные сигналы, которые и воздействуют на технологический процесс. Эти сигналы в исполнительных элементах автоматики преобразуются в механическое воздействие, перемещающее деталь или инструмент, закрывающее или открывающее кран, включающее или отключающее нагревательную установку и т. п. Так как это воздействие требует значительной энергии, то обработка информационных сигналов предусматривает, как правило, их усиление.
Таким образом, системы автоматики состоят из преобразовательных и исполнительных элементов.
Наиболее универсальным и удобным для систем автоматики оказался электрический сигнал. По сравнению с другими (пневматическими или гидравлическими) электрический сигнал имеет следующие преимущества:
Электрический сигнал можно передавать на большие расстояния.
Энергию электрического сигнала можно преобразовывать в другие виды энергии, прежде всего в механическую и тепловую, необходимые на любом производстве.
Электрический сигнал можно обрабатывать, в том числе усиливать, с помощью простых технических средств.
Именно поэтому наибольшее распространение получили электрические системы автоматики, т. е. использующие именно электрический сигнал.
С применением электрических элементов автоматики мы постоянно сталкиваемся в быту: датчики температуры в холодильнике и утюге; переключатели и реле в электрофоне, магнитофоне; потенциометрические, индуктивные и емкостные датчики для настройки радиоприемника и телевизора. Насыщенность же современного производства элементами автоматики во много раз выше.
В нашей стране создана Государственная система приборов и средств автоматизации (ГСП), в которую входят тысячи самых разнообразных элементов. С их помощью может быть построена практически любая система автоматики. Естественно, что элементы, входящие в ГСП, непрерывно совершенствуются, а состав системы расширяется.
Общие законы получения, хранения, передачи и преобразования информации в управляющих системах изучает кибернетика. Таким образом, изучение систем автоматики также является одной из задач кибернетики. Технические средства, с помощью которых построены автоматические системы, называются элементами автоматики.
Рассмотрим назначение этих элементов в системе автоматического регулирования. Работа любого технического агрегата или ход любого технологического процесса характеризуются различными физическими величинами, например температурой, давлением, скоростью, расходом вещества. Эти величины должны поддерживаться на заданном уровне или изменяться по заданному закону.
С помощью системы автоматического регулирования (САР) автоматически решаются задачи изменения какой-либо физической величины по требуемому закону. Физическая величина, подлежащая регулированию (изменению по заданному закону) в САР, называется обычно регулируемой величиной, а технический агрегат, в котором осуществляется автоматическое регулирование, — объектом регулирования. Автоматическое регулирование является частным случаем автоматического управления. Цель управления в этом случае
как раз и заключается в обеспечении требуемого закона изменения регулируемой величины.
1. Автоматика и обобщенные характеристики элементов систем автоматики
Системы автоматики выполняют три основные задачи: автоматическое управление, автоматический контроль и автоматическое регулирование.
Технические средства автоматики, содержащие различные автоматические устройства служат для получения, преобразования и хранения контрольной информации, формирования и передачи командной информации и использования ее для воздействия на управляемый процесс. Носитель информации – сигнал, который содержит сообщение, используемое в системах автоматического управления (САУ). Соответственно операциям, производимым с сигналами информации в САУ, могут быть выделены функциональные элементы автоматики. Элемент – это устройство, предназначенное для выполнения определенной операции. В автоматике применяют следующие функциональные элементы: датчики, усилители, модуляторы, демодуляторы, автоматические регуляторы, аналого-цифровые и цифро-аналоговые преобразователи, распределители, коммутаторы, генераторы постоянного тока, управляемые выпрямители и т. д. Так, например, датчики обеспечивают преобразование контролируемого параметра в сигнал, однозначно связанный с информацией об этом параметре; усилители предназначены для преобразования сигналов по величине, модуляторы и демодуляторы преобразуют сигналы по форме, например, сигнал постоянного тока в сигнал переменного тока и наоборот, управление и поддержание на заданном уровне параметров производится автоматически регулятором, распределение сигналов по различным цепям обеспечивают распределители, коммутаторы. Для выполнения логических операций с сигналами предназначены логические элементы. Хранение информации обеспечивают элементы памяти, накопители. Для программного управления в САУ широко применяются программаторы, для выполнения необходимых операций служат исполнительные устройства.
Элементы автоматики, представляющие собой конструктивно обособленную часть и выполняющие определенные самостоятельные функции образуют САУ, которая обеспечивает управление комплексом, технологическими процессами. Структурная схема САУ представлена на рис. 1.1, где ЗЭ – задающий элемент, СЭ – сравнивающий элемент, ЧЭ – преобразующий элемент (иногда объединяется вместе с датчиком), УЭ – усилительный элемент, ИЭ – исполнительный элемент, ОУ – объект управления, КУ – местная обратная связь (ОС), ГОС – главная ОС, РО – регулирующий орган. Для каждой САУ составляются алгоритм функционирования и алгоритм управления.
Алгоритм функционирования – это совокупность предписаний, правил или систематических зависимостей, определяющих правильное выполнение технологического процесса в каком-либо устройстве или комплексе.
Алгоритм управления – это совокупность предписаний, определяющих характер управляющих воздействий на объект с целью осуществления управления или заданного алгоритма функционирования.
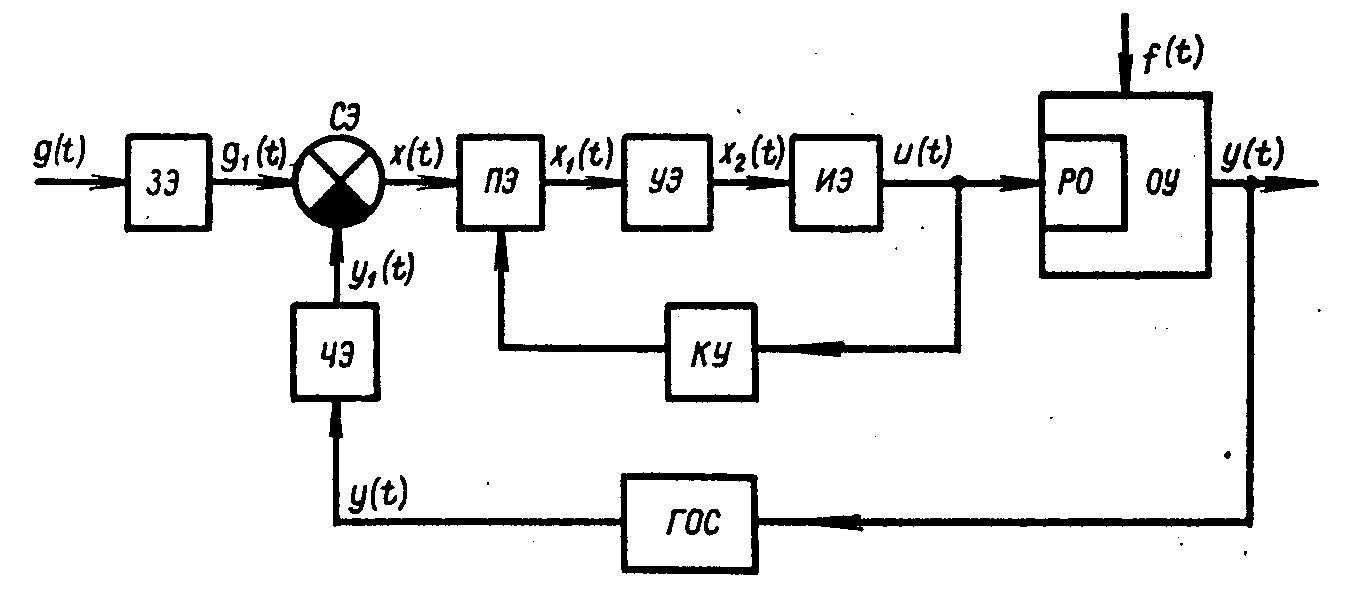
Рис. 1.1. Структурная схема САУ
Рассмотрим элементы автоматики с позиции применения электронных устройств.
Характеристики управления элементов сау
В автоматике применяются различные элементы систем автоматического управления: преобразовательные элементы, датчики, усилители, генераторы, реле, модуляторы, автоматические регуляторы, шифраторы, дешифраторы, счетчики, элементы микропроцессорной техники, наиболее широко применяемые из них представлены в данном пособии.
Основной характеристикой элемента, определяющей функциональную связь между входными и выходными сигналами в статике, т.е. в установившемся режиме работы, является характеристика управления.
Элементы систем автоматического управления, выполняя операции с сигналами, осуществляют функциональную связь между физическими величинами.
Изменение входной и выходной величин, характеризующих состояние элемента системы, осуществляется не мгновенно, а в течение определенного промежутка времени, и невозможно без изменения запаса энергии или вещества, содержащегося в данном элементе. В связи с этим процессы, протекающие в системах автоматического управления и в их элементах, описываются дифференциальными уравнениями, связывающими между собой зависимые величины и их производные по времени. Дифференциальное уравнение математически выражает физические процессы формирования выходного сигнала элемента при подачи входного сигнала.
Протекающие в элементе (системе) процессы в общем случае описываются нелинейным дифференциальным уравнением
![]() (1.1)
(1.1)
где
x
и у — соответственно входная и выходная
величины;
![]() -возмущающее воздействие;
-возмущающее воздействие;
![]() — время.
— время.
В элементе возможно наличие нескольких входных и выходных величин; может быть и несколько возмущающих воздействий.
Если возмущающим воздействием можно пренебречь, то уравнение (1.1) имеет вид
![]() (1.2)
(1.2)
Для установившегося (статического) режима имеют место соотношения
![]()
![]()
и
уравнение (1.2) принимает вид
![]() ,
решение которого относительно y
дает
,
решение которого относительно y
дает
y = f(x). (1.3)
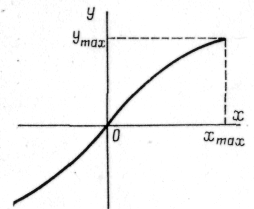
Полученная зависимость y = f(x) называется характеристикой управления элемента (иногда статической характеристикой). Для реальных элементов автоматики свойственны в основном нелинейные характеристики управления. Элементы с линейными характеристиками управления практически встречаются редко. Нелинейность характеристики обусловлена физическими свойствами элементов, т. е. наличием в них насыщения, зоны нечувствительности, зазоров, трения и т. п. На рис. 1.2 приведены некоторые типичные нелинейные характеристики управления элементов.
Характеристика, представленная на рис. 1.2, а, изображает непрерывную функциональную связь, когда непрерывному изменению входной величины х соответствует непрерывное плавное изменение выходной величины у; при этом крутизна характеристики уменьшается с увеличением х. Такая характеристика свойственна многим электрическим элементам с насыщением.
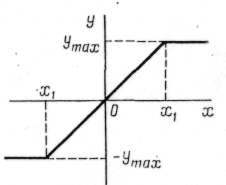
На рис. 1.2, б приведена идеализированная характеристика управления с ограниченной зоной линейности (в диапазоне от -х1 до x1). Область |x|>x1 называют зоной насыщения (y=±ymax). Эта характеристика свойственна различным элементам с насыщением, например магнитным, электронным и электромашинным усилителям, а также электродвигателям, имеющим ограничение по скорости вращения.
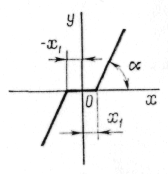
На рис. 1.2, в изображена идеализированная характеристика управления с зоной нечувствительности, т. е. с зоной, в пределах которой непрерывное изменение входной величины не вызывает появления выходной величины. В элементах с такой характеристикой отсутствует сигнал на выходе при |x|<x1. Минимальное абсолютное изменение входной величины (x1), необходимое для появления выходной величины, называют порогом чувствительности, а интервал изменения входной величины от — x1 до x1—зоной нечувствительности. Такую характеристику с нечувствительностью к малым сигналам имеют некоторые схемы с полупроводниковыми диодами, электродвигатели с напряжением трогания, зависящим от момента сопротивления, и др.
Для характеристики, приведенной на рис. 1.2, г, свойственно наличие как зоны нечувствительности (от - x1 до x1), так и зоны насыщения (|x| > x2).
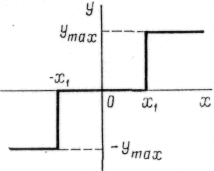
Функциональная зависимость y = f(x), в которой только при некоторых определенных значениях непрерывно изменяющейся входной величины выходная величина изменяется скачком, называется релейной характеристикой. Релейная характеристика с зоной нечувствительности изображена на рис. 1.2, д. При входной величине х = x1 (или х = -x1) происходит скачок выходной величины до постоянного значения ymax (или -ymax). Характеристику такого вида имеют, например, переключающие электронные устройства.
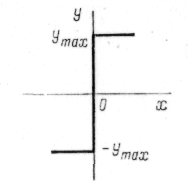
Если зона нечувствительности мала, то, положив x1 = 0, получим идеальную релейную характеристику, изображенную на рис. 1.2, е, которая иногда используется для приближенного анализа процессов в релейных устройствах.
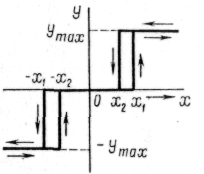
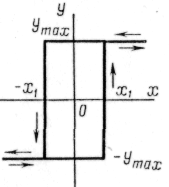
Характеристика управления элемента часто является неоднозначной, т. е. может иметь гистерезисный вид, в этом случае выходная величина зависит не только от изменения входной величины, но и от направления ее изменения (рис. 1.2, ж, з, и).
a) б) в)

г) д) е)

ж) з) и)
Рис. 1.2. Разновидности характеристик управления элементов
Неоднозначность, обуславливающую наличие в характеристике двух ветвей, из которых одна соответствует нарастанию входной величины, а другая - ее убыванию, можно объяснить, например, потерями энергии внутри элемента на перемагничивание, трение, нагревание и т. д. Неоднозначность может иметь место как в непрерывных, так и релейных характеристиках управления.
На рис. 1.2, з представлена релейная характеристика управления с неоднозначностью, а на рис. 1.2, ж, — с зоной нечувствительности и неоднозначностью. Первая характеристика присуща двухпозиционным реле, вторая — трехпозиционным электромагнитным поляризованным реле.
Неоднозначность характеристики управления, изображенной на рис. 1.2, и, свойственна элементам с наличием люфта и сухого трения в подвижных частях, например поводковым муфтам, редукторам и другим механическим передачам. Подобная характеристика, дополненная зоной насыщения, встречается в устройствах с петлей гистерезиса магнитной цепи.
Следует отметить, что характеристики управления y = f(x) могут проходить (см. рис. 1.2) и не проходить (см. рис. 1.3 и 1.4) через начало координат, что свойственно обычно для реверсивных и нереверсивных элементов соответственно.
От многих элементов автоматики требуется нелинейная характеристика управления. Например, нелинейную характеристику должны иметь стабилизаторы, элементы памяти, некоторые счетно-решающие элементы и др. Существенно нелинейной релейной характеристикой должны обладать реле, триггеры, импульсные усилители па основе реле и др. Кроме того, преднамеренное введение элементов с нелинейной характеристикой управления в систему автоматики часто является основным путем получения требуемых характеристик системы (повышения быстродействия, точности в установившемся режиме и т. п.). Например, введением в систему управления электродвигателями элементов с релейной характеристикой может достигаться повышение быстродействия, а также уменьшение веса и габаритов устройства.
Однако иногда нелинейность характеристики управления является нежелательным и даже вредным свойством элемента. Так, например, в устройствах автоматических измерений электрических и неэлектрических величин, в аналого-цифровых преобразователях требуется высокая линейность характеристик управления ряда элементов. В этих случаях или выбирают режимы работы элементов в ограниченной зоне характеристики, которая может быть принята линейной, или используют специальные линеаризующие устройства, совместная работа которых с нелинейными элементами позволяет получить линейную, либо близкую к линейной характеристику управления.
В теории нелинейных систем разработано большое число методов, позволяющих учитывать различные нелинейные зависимости. Ряд методов, оперирующих с реальными нелинейными характеристиками, дает возможность получить как количественные соотношения, так и качественные показатели, характеризующие работу устройств и систем с нелинейными элементами. Однако при теоретических исследованиях устройств и систем автоматики не всегда удобно использовать реальные нелинейные характеристики управления, поэтому нередко прибегают к линеаризации, т. е. замене фактических нелинейных зависимостей между входными и выходными величинами приближенными линейными зависимостями. Применяются различные методы линеаризации: метод малых отклонении (разложение нелинейной функции в ряд Тейлора), метод гармонической линеаризации, метод вибрационной линеаризации (линеаризация релейных характеристик), метод статистической линеаризации и т. д. Все эти вопросы рассматриваются в курсах теории автоматического управления и регулирования.