

2021_059
.pdfВторым этапом следует перепрограммирование исходного кода. Для реализации этого необходимо поставить определенные задачи:
Проанализировать исходный код;
Убрать излишние функции и команды, которые не потребуются в данном прототипе;
Создать новую систему управления движения электромоторами;
Изменить работу сервоприводов, которая будет подходить для мани-
пулятора;
Добавить дополнительный режим, способный управлять манипулятором для захвата предметов;
Провести серию тестов, в различных условиях для отладки всех режимов управления.
Исходный код опубликован разработчиками на сайте GitHub и находится в свободном доступе. Программирование выполняется среда разработки Arduino IDE
[1].Весь исходный код детально прокомментирован программистами, что существенно облегчило анализ. По мере изучения кода сразу вносились изменения.
Управление движением робота теперь реализовано не через четыре кнопки, а с помощью аналоговых «стиков». Управление работает по принципу трактора - есть две гусеницы, и за каждую отвечает свой «стик». Благодаря этому маневренность робота выросла в несколько раз.
Из рабочего режима отключены все, что отвечало за управление «старым обвесом» робота. Также добавлен второстепенный режим работы робота - режим для манипулятора. Эти два режима работают только отдельно друг от друга. Это сделано специально, чтобы предотвратить аварийные ситуации.
Старая система центрирования сервоприводов не подходила для манипулятора. При переключении сервоприводов она «выстреливала» из своего положения в центральное. Поэтому было решено заменить центральное положения начальным. При выходе из режима манипулятора все сервоприводы возвращается в свое начальное положение. За это отвечает участок кода, в котором сервоприводы перебираются от первой до последней, далее позиция сервопривода постепенно либо увеличивается, либо уменьшается до тех пор, пока не вернется в начальное положение. Таким образом все сервоприводы постепенно возвращаются в начальное положение одна за другой
Каждый из шести сервоприводов управляется по отдельности. Принцип заключается в следующем: сервоприводы переключаются по кругу, и в каждый момент времени активна только один сервопривод, который изменяет свое положение в пространстве.
В ходе тестирования было выявлено несколько особенностей:
Ходовая подвеска робота изменила свои свойства, в связи с возросшей массой. Центр тяжести переместился значительно выше, что уменьшило проходимость прототипа в отличие от оригинала.
Сервоприводы, использованные в прототипе имеют пластмассовые шестерни, и рассчитаны на малую нагрузку которая значительно ограничивает вес поднимаемых манипулятором предметов.
20

Подводя итоги можно сказать, что данный прототип прошёл все проверки и отвечает поставленной перед ним задачей. А именно будет участвовать в проведении АгроНТИ 2021 в качестве демонстрационной модели.
Литература
1. Гагарин А.А. Курс «Arduino для начинающих» // Занимательная робототехника [Элек-
тронный ресурс]. URL: http://edurobots.ru/kurs-arduino-dlya-nachinayushhix (дата обращения: 01.03.2021)
УДК 621.315.592
И.Ю. Змитрачков – студент; М.В. Шимановская – научный руководитель, старший преподаватель, ФГБОУ ВО Пермский ГАТУ
СОЗДАНИЕ ПРИЛОЖЕНИЯ, ПРИМЕНЯЮЩЕГО ПРИНЦИП ПАРЕТО ДЛЯ НАХОЖДЕНИЯ ОПТИМАЛЬНОГО РЕШЕНИЯ
Аннотация. Цель данной статьи — реализовать алгоритм формирования множества Эджворта-Парето, описать полученное приложение. В статье рассмотрен прицнип формирования множества, описан реализованный алгоритм, проблемы при его создании и возможные решения.
Ключевые слова: принятие решений, выбор альтернативы, множество Эджворта-Парето, алгоритм, приложение.
Принцип Эджворта-Парето является фундаментом многочисленных теоретических исследований, а также надежным инструментом при решении различных прикладных многокритериальных задач. Свое применение он находит в качестве фильтра для первичного отсева неконкурентоспособных альтернатив, оставляя за собой множество несравнимых альтернатив, называемых множеством ЭджвортаПарето. Далее уже из этого множетсва делается выбор альтернатив с применением более сильных методов. Принцип Парето не является универсальным. Существуют задачи, в которых его применение невозможно, но он все равно служит хорошим инструментом там, где его применение уместно.
Целью данной статьи будет описание приложения, формирующего множество Эджворта-Парето из множества альтернатив, поданных на вход.
Принцип формирования множества работает следующим образом — задаются критерии сравнения альтернатив, каждый из которых нужно максимизировать или минимизировать, после чего все альтернативы сравниваются попарно по всем критериям, в результате этих сравнений отсеиваются доминируемые альтернативы, а доминирующие, соответственнно, входят в множество Эджворта-Парето.
Определение. Альтернатива А называется доминирующей относительно альтернативы Б, если по всем критериям сравнения она не хуже, чем альтернатива Б, и хотя бы по одному критерию лучше. Альтернатива Б в таком случае называется доминируемой.
К множеству Эджворта-Парето относятся только те альтернативы, которые не находятся в отношении доминирования, их называют несравнимыми.
21
Для демонстрации выбора альтернативы на основе критериев приведем пример. Допустим, люди желают отдохнуть и выбирают для этого тур. Критериями выступают стоимость и привлекательность маршрута. Есть несколько альтернатив. Необходимо выбрать одну из них. Варианты можно представить в виде таблицы.
Сравним альтернативы попарно. При рассмотрении первого и третьего туров предпочтительнее третий тур, потому что он не хуже по критерию «стоимость» и лучше по критерию «привлекательность». Удаляем из рассмотрения первый тур, он доминируется третьим. Остаётся рассмотреть второй и третий туры. Здесь также третья альтернатива доминирует над второй, так как по критерию «привлекательность» оценки одинаковы, а по «стоимость» лучше третья альтернатива. В такой постановке задачи множество Э-П содержит одну альтернативу (третий тур), и, очевидно, его и следует выбрать.
Изменим условие. Предположим, что по какой-то причине поездка по третьему туру стала невозможной. В таким случае первый и второй туры не находятся в отношении доминирования. По одному из критериев лучше альтернатива 2, по другому – альтернатива 1, и они обе войдут в множество Э-П.
Задачей исследования было автоматизировать процесс выделения множества Эджворта-Парето из множества альтернатив задачи, разработать алгоритм и реализовать его. Приложение было написано на языке Python с применением парадигмы объектно-ориентированного программирования. Для формирования графического интерфейса была использована библиотека tkinter. На вход приложению подаются количество критериев и количество альтернатив, после чего программа формирует поля для ввода критериев и альтернатив для сравнения. На выходе получаем множество Эджворта-Парето.
Рис. 1. Двухмерный список с входными данными
Входные данные хранятся в виде двумерного списка, где каждый вложенный список содержит данные об одной альтернативе.
22

Есть также список с критериями, по которым идет сравнение.
Рис. 2. Список с критериями
Вычисления проводятся следующим образом — существуют 4 вложеннных цикла. Первые 2 из них идут по вложенному списку входных данных, то есть перебирают все альтернативы. За одну итерацию первого цикла полностью выполняется второй цикл, то есть каждая альтернатива успевает попарно сравниться со всеми другими альтернативами.
Сравнение альтернатив работает следующим образом — существует 2 цикла, перебирающих список с критериями. Прицнип аналогичен перебору входных данных, описанному выше. Выбирается главный критерий и побочный. За формирование главного критерия отвечает верхний цикл, а за формирование побочного — вложенный. Относительно главного критерия идет строгое сравнение(больше, меньше), а относительно побочного — не строгое(больше или равно, меньше или равно). В каждом сравнении набор критериев меняется несколько раз - главный критерий переходит по списку критериев от одного к другому и сравнение идет относительно каждого полученного набора. В конце имеем список булевских значений. Каждое значение — результат сравнения альтернатив по одному набору критериев. И если они все элементы списка положительны, то по каждому набору альтернатива является доминирующей. В таком случае вносим ее в множество Эджворта-Парето и отсеиваем доминируемую альтернативу.
Рис. 3. Метод compute(), производящий вычисления
Значения, получаемые в результате итераций циклов, являются индексами списков с входными данными. Сравнение реализовано в виде нескольких условных операторов, расположенных в самом нижнем цикле. В каждом условии идет обращение к спискам по индексам, полученным в переборе и сравнение полученных значений между собой
23
Приложение, описываемое в данной статье является начальным вариантом и нуждается в доработке. При таком большом количестве вложенных циклов вычисления большого объема будут проводиться очень долго. В дальнейшем планируется переписать приложение на более быстрый язык, например С++, Golang или другой компилируемый язык. Графическую библиотеку tkinter в будущем планируется заменить полноценным веб-интерфейсом, а само приложение разбить на 2 части — backend, написанный на компилируемом языке со статической типизацией, и frontend, выполненный в виде веб-приложения.
Литература
1.Муратова Е.А. Принятие эффективных управленческих решений в сельском хозяйстве : монография / Е. А. Муратова, Ю. Г. Югов. - Пермь : Пермская ГСХА, 2010. - 125с.
2.Светлов Н.М. Информационные технологии управления проектами : / Н. М. Светлов, Г. Н. Светлова. - Москва : ИНФРА-М, 2012. - 231с.
3.Сатунина А.Е. Управление проектом корпоративной информационной системы предприятия : учебное пособие / А. Е. Сатунина, Л. А. Сысоева. - М. : М. : Финансы и статистика,
ИНФРА-М, 2009. - 350с.
УДК 004.4
Е.И. Илларионова – студентка; А.Ю. Беляков – научный руководитель, доцент,
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
АВТОМАТИЗАЦИЯ ВНЕСЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В ДЕМОНСТРАЦИОННУЮ СИСТЕМУ ДОБЫЧИ НЕФТИ
Аннотация. В статье представлена разработка модуля корректировки данных демонстрационного стенда предприятия. Для решения данной задачи в программе AllFusion ERWin Process Modeler былп построена функциональная модель AS-IS, выявляющая ключевые недостатки бизнес-процесса предприятия, а также модель TO-BE, обеспечивающая устранение этих недостатков.
Ключевые слова: демонстрационный стенд, модель TO-BE, модель AS-IS,
модуль ручного ввода, PI Asset Framework OSIsoft.
Демонстрационный стенд добычи нефти является программным продуктом компании ООО «ИТ Профессиональные Решения» г. Пермь, предназначенный для визуализации технологических процессов АСУ ТП нефтедобывающих и нефтеперерабатывающих предприятий. На программном уровне демостенд представляет собой совокупность модулей системы, каждый из которых имеет определенную настраиваемую функцию, для взаимодействия и показа определённых параметров.
В рамках данной работы были изучены, промоделированы и проанализированы бизнес-процессы демостенда. В ходе исследований был выявлен следующий линейный алгоритм действий пользователя при работе с демостендом:
на первом этапе пользователь в PI Explorer должен самостоятельно найти с помощью древовидной иерархии необходимый ему элемент данных;
24
далее пользователь добавляет дочернюю или же изменяет имеющуюся переменную атрибута в Analizic, при этом надо учитывать тот фактор, что эта переменная должна быть на первом приоритете;
в дальнейшем пользователь запускает Тренд, чтобы создались временные ряды и точки в PI point и изменения вступили в силу;
далее пользователь фиксирует изменения;
после чего система проверяет скорректированные данные на целостность и, если были допущены ошибки в создании или изменении переменной, а также ошибки в процессе запуска или настройки тренда, то процедуру необходимо будет повторить.
Данные атрибутов, после проверки целостности, собираются в дашборде – они предназначены для последующей демонстрации графиков и текущего значения атрибутов. В дальнейшем данные отправляются в журнал событий и сформированный дашборт запускается и становится доступным для осмотра и анализа пользователем.
Таким образом, в результате исследования были выявлены следующие недостатки процесса:
существует вероятность допущения ошибок во время корректировки технологических параметров;
необходимо выделять для каждого пользователя учетную запись на Windows Server и допускать корректировки только через нее.
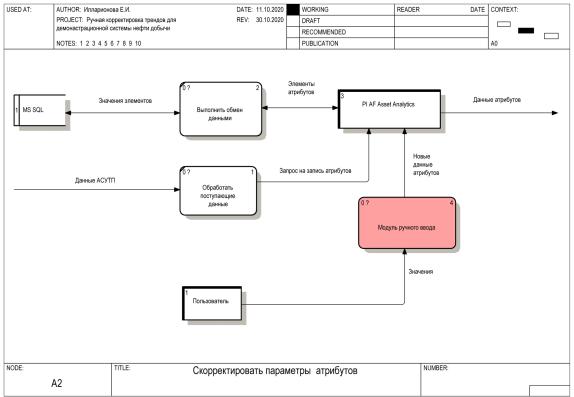
Выявленные недостатки могут быть устранены при реализации функциональной модели [1, 2] TO-BE (рис. 1).
Рисунок 1. Диаграмма TO-BE блока «Скорректировать параметры атрибутов»
25
Теперь у пользователя отпала необходимость включать PI AF, но он может изменить параметры атрибутов, управляя «Модулем ручного ввода», через оконный режим в демонстрационном стенде. Так как модуль использует при подключении к Базе данных учетную запись при входе в демонстрационный стенд, то пользователю нет необходимости снова аутентифицировать себя или запускать на Windows Server Базу данных PI Asset Framework OSIsoft на предприятии. Таким же образом модуль сам определят права и полномочия пользователя в отношении к демостенду.
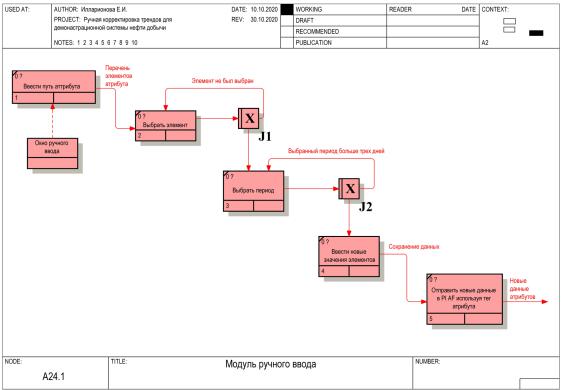
Декомпозиция блока представлена на рисунке 2 в нотации IDEF3.
Рисунок 2. Диаграмма TO BE блока «Скорректировать данные»
Процесс «Модуль ручного ввода» представлен в виде последовательности простых действий. Пользователю нет необходимости настраивать, либо пытаться подключиться к PI AF, так как модуль производит эти действия на программном уровне самостоятельно. Теперь корректировка данных происходит следующим образом:
пользователь вводит путь атрибута, по категориям: Месторождение, Куст, Скважина, Узел;
в дальнейшем из списка элементов атрибута пользователь выбирает элемент, в котором необходимо сделать корректировку. Если элемент не был выбран, то последующие действия вызовут сообщение о том, что элемент не выбран;
далее выбирается период, который не должен превышать трех дней;
кроме того, пользователь может вести изменения значений и сохранить свои действия;
26
все изменения поступят в PI AF, где будут внесены в базу данных. Таким образом, разработанный модуль ручного ввода данных в демонстра-
ционную систему добычи нефти значительно упрощает работу пользователя на этапах подключения, аутентификации, выполнения запросов и внесения изменений. Кроме того, ограничение доступа к определенным параметрам АСУ ТП обеспечивает сохранение целостности и конфиденциальности данных.
Литература
1.Григорьев, М. В. Проектирование информационных систем: учеб. пособие для вузов / М. В. Григорьев, И. И. Григорьева. – Москва: Издательство Юрайт, 2018. – 318 с.
2.Маклаков С.В. Моделирование бизнес-процессов с AllFusion ERWin 4.0.-М.: Диа-
лог МИФИ, 2002.-224с.
УДК 633.1:631.542.4
В.С. Калинин – студент; А.В. Кондратьев - научный руководитель, к.пед.н., доцент,
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
ПЕРЕПРОГРАММИРОВАНИЕ ЭЛЕКТРОННОГО БЛОКА УПРАВЛЕНИЯ АВТОМОБИЛЕМ
Аннотация. Статья посвящена перепрограммированию электронного блока управления автомобиля. В ней рассматриваются приборы для диагностики и программирования, а также порядок действий при перепрограммировании.
Ключевые слова: электронные блоки управления, перепрограммирование, диагностика, инжектор.
Электронные блоки управления (ЭБУ) автомобильными двигателями, реализованные на микропроцессорах и микроконтроллерах, используются уже более 40 лет. Первые образцы были направлены на уменьшение расхода топлива, улучшение смесеобразования, снижение токсичности выхлопных газов. Такие двигатели получили название впрысковых или инжекторных.
Впервые отечественная микропроцессорная система управления двигателем (МСУД) появилась на автомобиле ВАЗ 21083 в 1985 году. Так как двигатель был карбюраторным, то система управляла лишь углом опережения зажигания и углом накопления энергии в катушке зажигания [1]. Датчиками этой системы являлись: датчик положения коленчатого вала, датчик разрежения во впускном коллекторе, датчик температуры двигателя, исполнительным механизмом были две двухвыводные катушки зажигания. Блок управления был реализован на секционированном микропроцессоре К589. Эта система показала себя эффективной и надежной, улучшились динамические качества автомобиля, снизились расход топлива и токсичность выхлопных газов. Улучшилась стабильность характеристик во времени.
За прошедшее время системы управления существенно изменились, управление ведется уже не по одному параметру, число датчиков и исполнительных механизмов возросло. Примерная структура системы управления приведена на рисунке 1.
27
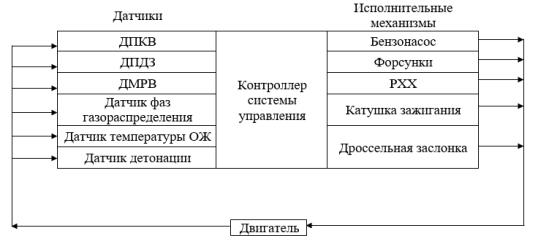
Рис. 1 Структура системы управления
На рисунке:
ДПКВ – датчик положения коленчатого вала;
ДПДЗ – датчик положения дроссельной заслонки;
ДМРВ – датчик массового расхода воздуха;
РХХ – регулятор холостого хода;
Датчик температуры ОЖ – датчик температуры охлаждающей жид-
кости.
Наряду с достоинствами появились и трудности. Если карбюратор и система зажигания автомобиля доинжекторного периода могли быть отрегулированы в любом гараже (как правило, с невысоким качеством, поскольку это требовало достаточно серьезных знаний теории двигателя внутреннего сгорания). Поэтому значительная часть легкового парка эксплуатировалось с разрегулированными системами зажигания. Но электроника на автомобиле нуждалась в квалифицированном сервисе.
Гаражный период для тех умельцев, которые не освоили компьютер, не обзавелись нужной аппаратурой и программным обеспечением (ПО) безвозвратно завершился.
Система управления представляет возможность быстрой диагностики неисправностей, а также изменения программы управления для улучшения каких-либо качеств автомобиля для конкретного потребителя. На слуху термины «перепрошивка», «чип-тюнинг».
Перепрограммирование алгоритма управления (чип-тюнинг) – это самый бюджетный и доступный вид тюнинга своего автомобиля, когда меняя параметры в ЭБУ можно кардинально изменить поведение автомобиля, сделать его более послушным, «приемистым», экономичным.
Однако, отсутствие у многих автолюбителей достаточной IT-подготовки является психологическим барьером перед самостоятельными настройками, регулировками, диагностикой электронного блока.
В статье сделана попытка показать, что самостоятельные работы в этой области возможны, не слишком затратны и вполне посильны многим пользователям
28
ПК. Однако, цельная и законченная методика, как правило, не публиковалась в автомобильной периодике. Такая методика была разработана по результатам анализа нескольких публикаций.
Рассмотрим её на примере диагностики и перепрограммирования ЭБУ Ителма М73, установленного штатно на автомобиль ВАЗ-2114.
Мы не рассматриваем тюнинговые алгоритмы управления, т.к. это сфера деятельности специалистов по двигателям, хотя имеется множество готовых программ тюнинга для различных ЭБУ.
Чтобы сменить программу, нужен специальный прибор и ПК, в редких случаях все же нужно разбирать и дорабатывать блок управления.
Внастоящее время можно выделить несколько приборов для диагностики и чип-тюнинга, позволяющие менять ПО.
ELM327 – это специальное Bluetooth-устройство, которое позволяет произвести диагностику автомобиля, выявить ошибки в ЭБУ, понять их причину и устранить, не прибегая при этом к помощи квалифицированных специалистов. Данное устройство поддерживает все современные протоколы и поэтому позволяет просканировать большое количество автомобилей.
VAG-COM KKL — сканер дилерского уровня для компьютерной диагностики автомобилей VAG, оборудованных разъемами OBD II. Адаптер совместим со всеми моделями автомобилей Volkswagen, Audi, Seat, Skoda, ВАЗ (производит диагностику отечественных автомобилей ВАЗ и ГАЗ выпущенных по 2010 год.). Оснащен стандартным разъемом OBD-2 для подключения к автомобилю, что исключает ошибки в подключении. Достоинство также в том, что данный адаптер подключается к компьютеру посредством USB порта, что важно при использовании современного ноутбука для диагностики автомобиля.
Перед проведением программных изменений следует убедиться в отсутствии неисправности автомобиля. Для диагностики ЭБУ Ителма М73 можно использовать программу «OpenDiag».
Для изменения внутреннего ПО необходимо следующее оборудование: - K-line адаптер;
- Аккумуляторная батарея или блок питания, выдающий напряжение 12 В; - компьютерная программа для загрузки прошивки; - файл прошивки.
Дальнейшие действия нужно проводить на деинсталлированном ЭБУ. Блок управления подключаем к компьютеру в режиме программирования согласно представленной схеме на рисунке 2.
На схеме обозначены номера используемых контактов: 51,53 – масса; 12 – неотключаемое питание; 13 – включение зажигания; 44, 63 – питание главного реле; 71 – K-line; S2 – ключ программирования [3].
Вкомпьютерной программе для загрузки прошивки (в данном случае используется «OpenDiagFlasher») необходимо выбрать последовательный порт, к которому подключен K-Line адаптер, модель блока, скорость последовательного порта.
29