

4.3 Аналоговые регуляторы
 .
При условии
.
При условии
![]() ,
,
![]() .
.
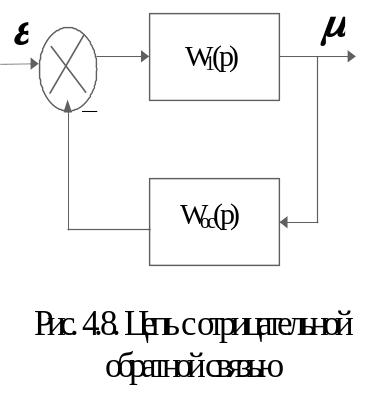
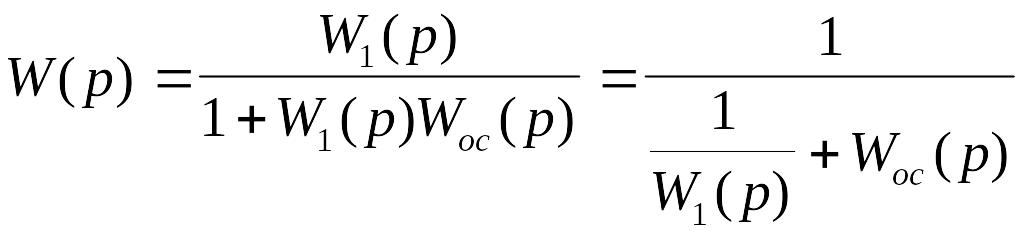
Отсюда можно сделать вывод, что при достаточно большом коэффициенте передачи в прямой цепи звено обратной связи практически полностью определяет передаточную функцию соединения звеньев, охваченных отрицательной обратной связью. Это свойство широко используется при построении регуляторов с различными характеристиками.
4.3.1 Аналоговый пропорциональный регулятор
Простейшим
пропорциональным регулятором
(П-регулятором) является пропорциональное
звено (усилитель), описываемое уравнением
![]() и имеющее передаточную функцию W(p)=K.
и имеющее передаточную функцию W(p)=K.
![]() ,
где ТИМ
– величина обратная скорости перемещения
ИМ при единичном входном воздействии.
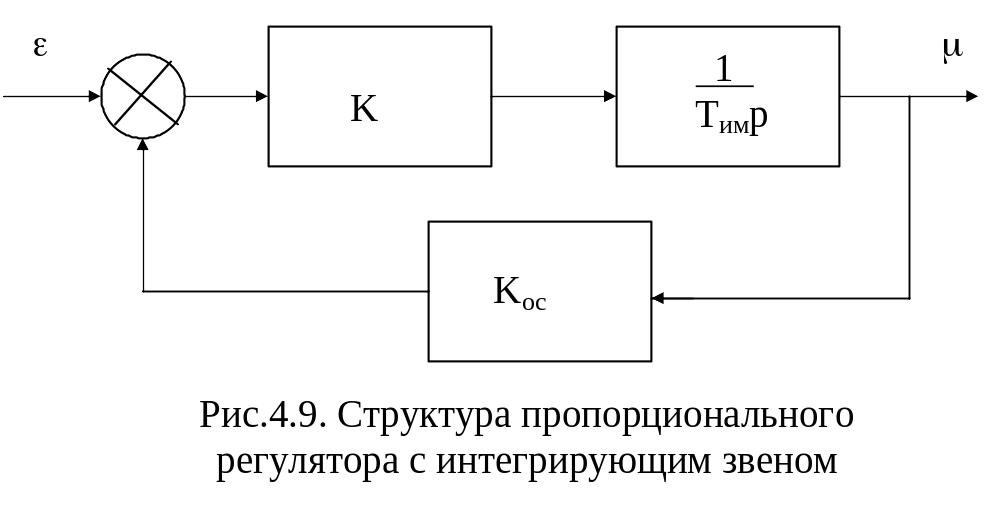
Для получения П-закона регулирования
при последовательном соединении
усилителя и интегрирующего звена они
охватываются отрицательной обратной
связью как показано на рисунке 4.9, тем
самым включая ИМ в состав регулятора.
Для организации обратной связи по
положению ИМ используется его датчик
положения. При использовании резистивного
датчика положения ИМ, представляющего
собой реостат, и единичном усилении его
выходного сигнала
,
где ТИМ
– величина обратная скорости перемещения
ИМ при единичном входном воздействии.
Для получения П-закона регулирования
при последовательном соединении
усилителя и интегрирующего звена они
охватываются отрицательной обратной
связью как показано на рисунке 4.9, тем
самым включая ИМ в состав регулятора.
Для организации обратной связи по
положению ИМ используется его датчик
положения. При использовании резистивного
датчика положения ИМ, представляющего
собой реостат, и единичном усилении его
выходного сигнала
![]() ,
где UПИТ
– напряжение питания
реостата, ФП
– полный угол поворота ИМ.
,
где UПИТ
– напряжение питания
реостата, ФП
– полный угол поворота ИМ.
Д ействительно,
в этом случае для передаточной функции
регулятора можно записать W(P)=
ействительно,
в этом случае для передаточной функции
регулятора можно записать W(P)= .
Передаточная функция такой цепи равна
произведению передаточной функции
пропорционального звена и балластного
апериодического звена, представляющего
собой инерционное звено первого порядка.
Для уменьшения влияния балластного
звена необходимо увеличивать коэффициент
передачи усилительного
звена
К. Коэффициент передачи определяется
усилением в цепи обратной связи.
Параметром настройки регулятора является
коэффициент усиления звена обратной
связи. Его изменение приводит к изменению
коэффициента передачи регулятора и к
изменению постоянной балластного звена
.
Передаточная функция такой цепи равна
произведению передаточной функции
пропорционального звена и балластного
апериодического звена, представляющего
собой инерционное звено первого порядка.
Для уменьшения влияния балластного
звена необходимо увеличивать коэффициент
передачи усилительного
звена
К. Коэффициент передачи определяется
усилением в цепи обратной связи.
Параметром настройки регулятора является
коэффициент усиления звена обратной
связи. Его изменение приводит к изменению
коэффициента передачи регулятора и к
изменению постоянной балластного звена
![]() .
При увеличении Кос
уменьшается коэффициент передачи
регулятора и уменьшается постоянная
времени балластного звена и наоборот.
Балластное звено демпфирует кратковременные
отклонения регулируемой величины, как
показано на рисунке 4.10 переходной
функции регулятора.
.
При увеличении Кос
уменьшается коэффициент передачи
регулятора и уменьшается постоянная
времени балластного звена и наоборот.
Балластное звено демпфирует кратковременные
отклонения регулируемой величины, как
показано на рисунке 4.10 переходной
функции регулятора.
Например:
при напряжении питания датчика 20в и
полном угле поворота 1рад. получим
Кос=20в/рад.,
Кр=0.005рад/в.
Если
![]() и К=10,
то
и К=10,
то
![]() и
и
 .
.
4.3.2. Аналоговый интегральный регулятор
При
интегральном законе (И-законе) регулирования
![]() ,
где
-
отклонение регулируемой величины от
заданной,
- регулирующее воздействие. При постоянном
отклонении
,
где
-
отклонение регулируемой величины от
заданной,
- регулирующее воздействие. При постоянном
отклонении![]()
![]() .
Если
.
Если
![]() ,
то
,
то
![]() .
На практике И-закон не используется,
т.к. в системе при его применении
получается большое запаздывание. Он
используется в сочетании с П-законом.
.
На практике И-закон не используется,
т.к. в системе при его применении
получается большое запаздывание. Он
используется в сочетании с П-законом.
4.3.3. Аналоговый пропорционально-интегральный регулятор
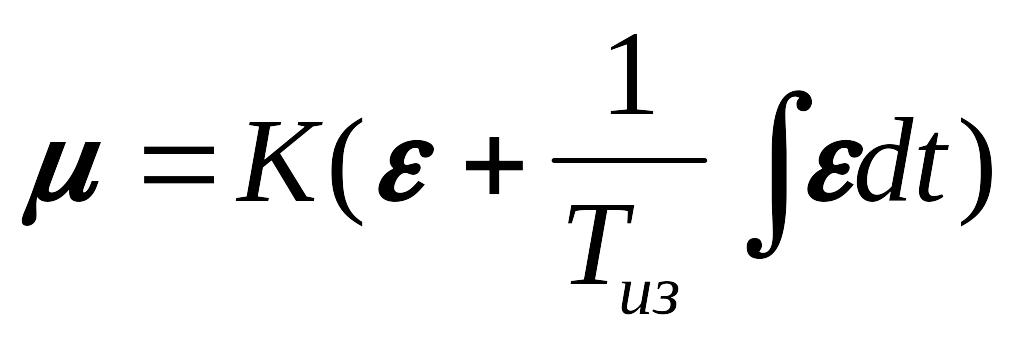
Идеальный ПИ-регулятор описывается уравнением
 ,
где К-коэффициент передачи регулятора,
,
где К-коэффициент передачи регулятора,
![]() -постоянная
времени интегрирования,
-постоянная
времени интегрирования,
![]() -
постоянная времени изодрома. При
ступенчатом воздействии
выходной сигнал равен
-
постоянная времени изодрома. При
ступенчатом воздействии
выходной сигнал равен
 .
При t=
.
При t=
![]() .
Таким образом,
- время за которое выходной сигнал
достигнет значения равного удвоенного
значения "П"-составляющей.
.
Таким образом,
- время за которое выходной сигнал
достигнет значения равного удвоенного
значения "П"-составляющей.
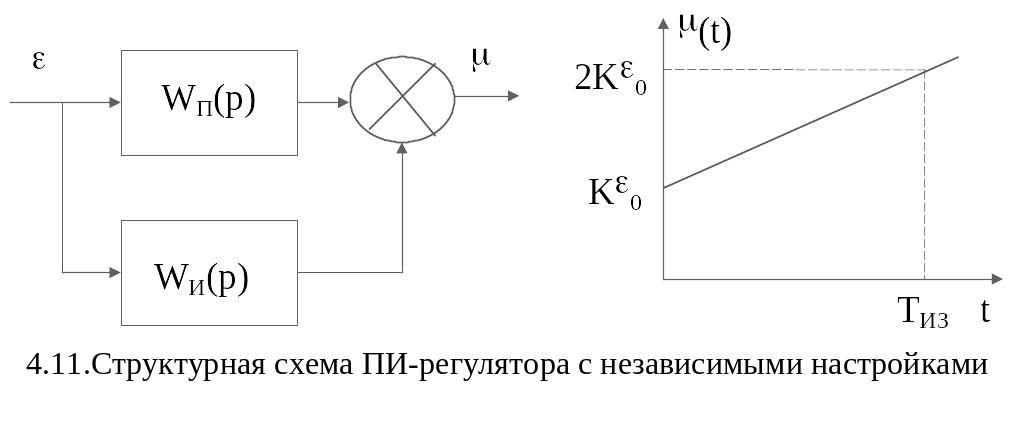
Параметры настройки такого регулятора независимы.
Возможно
построение системы и с зависимыми
настройками. В этом случае передаточная
функция будет иметь вид
 .
Структура такого регулятора представлена
на рисунке 4.12. Постоянная времени
интегрирующего звена равна времени
изодрома.
.
Структура такого регулятора представлена
на рисунке 4.12. Постоянная времени
интегрирующего звена равна времени
изодрома.
В реальных условиях ПИ-регулятор часто
нагружают на исполнительный механизм,
представляющий собой интегрирующее
звено. В этом случае ИМ необходимо
охватить отрицательной обратной связью
для получения эквивалентного
апериодического звена, как показано на
рисунке 4.13. Тогда передаточная функция
регулятора равна
реальных условиях ПИ-регулятор часто
нагружают на исполнительный механизм,
представляющий собой интегрирующее
звено. В этом случае ИМ необходимо
охватить отрицательной обратной связью
для получения эквивалентного
апериодического звена, как показано на
рисунке 4.13. Тогда передаточная функция
регулятора равна
 .
Из полученной передаточной функции
видно, что при реализации ПИ-закона в
системе появляется балластное звено.
Таким образом, реальный ПИ-регулятор
отличается от идеального тем, что в
функции передачи появляется усилительное
звено
.
Из полученной передаточной функции
видно, что при реализации ПИ-закона в
системе появляется балластное звено.
Таким образом, реальный ПИ-регулятор
отличается от идеального тем, что в
функции передачи появляется усилительное
звено
![]() и апериодическое балластное звено
и апериодическое балластное звено![]() с п
с п остоянной
времени
остоянной
времени![]() .
Переходная функция реального регулятора
с балластным звеном в этом случае имеют
вид, представленный на рисунке 4.14. На
практике для синтеза ПИ-регулятора
используются и другие схемы, например,
представленные на рисунках 4.15, 4.16.
.
Переходная функция реального регулятора
с балластным звеном в этом случае имеют
вид, представленный на рисунке 4.14. На
практике для синтеза ПИ-регулятора
используются и другие схемы, например,
представленные на рисунках 4.15, 4.16.
Передаточные
функции этих регуляторов равны
соотвествено:


Передаточные функции балластных звеньев определяются из структуры регулятора.