

Пособие ТММ (УМО) переработанное
.pdfЕ.К.КИЧАЕВ, А.М.ЛАШМАНОВ, П.Е. КИЧАЕВ, Л.А. ДОВНАР
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
УЧЕБНОЕ ПОСОБИЕ ДЛЯ СТУДЕНТОВ ОЧНОЙ И ЗАОЧНОЙ ФОРМ ОБУЧЕНИЯ
2-е издание переработанное
Самара 2011

МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования «Самарский государственный технический университет»
Е.К.КИЧАЕВ, А.М.ЛАШМАНОВ , П.Е. КИЧАЕВ, Л.А. ДОВНАР
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
УЧЕБНОЕ ПОСОБИЕ ДЛЯ СТУДЕНТОВ ОЧНОЙ И ЗАОЧНОЙ ФОРМ ОБУЧЕНИЯ
2-е издание переработанное
Самара 2011
2
УДК 621. 01
Теория механизмов и машин: Учеб. пособ./Е. К. Кичаев, А. М. Лашманов, П. Е. Кичаев, Л. А. Довнар; Самарс. гос. техн.
ун-т. Самара, 2007. 124 с.
В пособии описаны методы структурного, кинематического и динамического анализа рычажных механизмов. Рассмотрены основные принципы синтеза зубчатых и кулачковых механизмов. Материал изложен с учетом требований и стандартов; представлены как графоаналитические, так и аналитические методы определения параметров механизмов и машин.
Пособие предназначено для студентов технических вузов заочной формы обучения при решении самостоятельных практических работ и выполнении курсового проекта по теории механизмов и машин.
Ил. 48. Табл. 22. Библиогр.: 9 назв.
Печатается по решению редакционно-издательского совета Самарского государственного технического университета
Рецензенты: д-р техн. наук В. Б. Б а л я к и н Д-р техн. наук Ю. Э. С е н и ц к и й
ISBN 5-06-003118-7 Е.К.Кичаев, А.М.Лашманов, П.Е.Кичаев, Л.А.Довнар, 2007 Самарский государственный технический университет 2007
3
|
|
СОДЕРЖАНИЕ |
|
|
|
|
Предисловие………………………………………………………………………… |
|
|
…. |
5 |
||
1.Календарный план освоения курса…………………………………………………. |
6 |
|
|
|
||
2.Теоретический курс………………………………………………………………….. |
|
|
|
7 |
||
2.1 |
Лекция №1. |
Введение. Структурный анализ механизмов………………… |
|
7 |
||
2.2 |
Лекция №2. |
Кинематический анализ механизмов………………………… |
|
13 |
||
2.3. Лекция №3. Силовой анализ механизмов…………………………………. |
20 |
|
|
|||
2.4. Лекция №4. Динамический анализ механизмов…………………………... 25 |
|
|
||||
2.5. Лекция №5. Виброзащита машин. Уравновешивание……………………. |
29 |
|
||||
2.6. Лекция №6. Проектирование зубчатых передач…………………………... |
|
34 |
||||
2.7. Лекция №7. Кинематика зубчатого зацепления…………………………… |
|
40 |
||||
2.8 |
Лекция №8. |
Кулачковые механизмы……………………………………….. |
47 |
|
|
|
3.Курсовая работа……………………………………………………………………… |
|
|
|
50 |
||
3.1Альбом заданий………………………………………………………………. 51
3.2Методические указания…………………………………………………….... 62
3.3Пример оформления расчетно-пояснительной записки и графической части…………………………………………………………. 89
3.4Перечень вопросов, выносимых на защиту работы……………………….. 115
4. Оценка знания курса……………………………………………………………… |
... 118 |
Приложения……………………………………………………………………………. 119 |
|
Библиографический список…………………………………………………………… |
123 |
4
ПРЕДИСЛОВИЕ Сложившаяся ситуация в университетах по сокращению часов на общетехни-
ческие дисциплины создает затруднение для успешного освоения студентами изучаемого материала. Подобная тенденция коснулась и курса «Теория механизмов и машин» (ТММ). Так, например, для машиностроительных специальностей 151001, 151002, 151003 и др. односеместровый лекционный курс составляет 17 аудиторных часов с параллельным выполнением 5-ти листового курсового проекта. В худшем положении находятся студенты факультетов дистанционного и заочной формы обучения. Обилие литературы по ТММ как в теоретическом так и в практическом аспектах создает студентам затруднение в соответствующем выборе для выполнении самостоятельных контрольных работ, курсовых проектов и при подготовке к экзаменам. Единственным способом облегчения и улучшения качества в освоении предмета является интерактивные методы обучения, которые требуют создания новых методических продуктов.
Данное пособие является одним из шагов в этом направлении, позволяя студентам в интерактивной форме на примере кривошипно-ползунных механизмов рассмотреть алгоритмы определения их параметров традиционными графоаналитическими и современными аналитическими методами.
Предлагаемое пособие не претендует на полноту изложения курса ТММ и не подменяет классические учебники, а является как бы «Путеводителем» при самостоятельном изучении предмета.
5
|
1. КАЛЕНДАРНЫЙ ПЛАН ОСВОЕНИЯ КУРСА |
|
|
Содержание |
№ п/п |
|
недели |
|
|
|
|
1. |
Лекция №1. Введение. Структурный анализ механизмов. |
2 |
|
Самоконтроль |
3 |
|
Рубежный контроль |
3 |
|
Выдача курсовой работы согласно п. 3.1 |
4 |
2. |
Лекция №2. Кинематический анализ механизмов |
4 |
|
Самоконтроль |
5 |
|
Рубежный контроль |
5 |
|
Готовность 1 листа курсовой работы |
6 |
3. |
Лекция №3. Силовой анализ механизмов |
6 |
|
Самоконтроль |
7 |
|
Рубежный контроль |
7 |
4. |
Лекция №4. Динамический анализ механизмов |
8 |
|
Готовность 2 листа курсовой работы |
8 |
|
Самоконтроль |
9 |
|
Рубежный контроль |
9 |
5. |
Лекция №5. Виброзащита машин |
10 |
|
Готовность 3 листа курсовой работы |
10 |
|
Самоконтроль |
11 |
|
Рубежный контроль |
11 |
6. |
Лекция №6. Геометрия зубчатого зацепления |
12 |
|
Готовность расчетно-пояснительной записки |
12 |
|
Самоконтроль |
13 |
|
Рубежный контроль |
13 |
7. |
Лекция №7. Кинематика зубчатого зацепления |
14 |
|
Готовность курсовой работы к защите |
14 |
|
Самоконтроль |
15 |
|
Рубежный контроль |
15 |
8. |
Лекция №8. Кулачковые механизмы |
16 |
|
Защита курсовой работы |
16-17 |
|
Самоконтроль |
17 |
|
Рубежный контроль |
17 |
9. |
Итоговый контроль |
18-19 |
6
2.ТЕОРЕТИЧЕСКИЙ КУРС
2.1.Лекция №1. Введение
Теория механизмов и машин (ТММ) – наука об общих методах исследования свойств механизмов и машин (анализ) и проектирования их схем (синтез). Излагаемые в ТММ методы являются общими и не зависят от целевого назначения механизмов и машин.
Механизм – это система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемое движение других тел относительно одного из них, принятого неподвижным.
Рассмотрим в качестве примера кривошипно-ползунный механизм рис. 2.1, который лежит в основе двигателей внутреннего сгорания, поршневых компрессоров и насосов, ковочных машин и прессов и т.д. Не смотря на специфические требования, они все имеют одинаковые зависимости, описывающие их структуру, геометрию, кинематику и динамику, что и является предметом изучения курса ТММ.
1 А |
2 |
|
S2 |
|
|
ϕ1 |
В |
3 |
О ω1 |
|
|
|
|
 0
0
Р и с . 2.1. Пример плоского механизма с низшими парами
Машина – устройство, выполняющее механические движения для преобразования энергии, материалов и информации.
Схема машины:
|
1 |
|
|
|
2 |
|
|
|
3 |
1 – |
двигатель |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 – |
передаточный механизм |
|
|
|
|
|
|
|
|
|
|
3 – |
исполнительный механизм |
|
|
|
|
|
4 |
|
|
|
3 |
||
|
|
|
|
|
|
|
|
4 – |
регулятор |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
Система |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
3 |
|
|
|||||
обратной |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||
|
связи |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Машины разделяются на:
Двигательпреобразующий один вид энергии в другой, например, двигатель внутреннего сгорания (ДВС);
7
Рабочая машина – потребляющая энергию извне и совершающая полезную работу. Например, станки, прессы, насосы, конвейеры, качалки и т.д. В качестве исполнительного механизма рабочей машины часто используют рычажные механизмы.
Машинным агрегатом называют объединение двигателя и рабочей машины. В качестве передаточного механизма используют фрикционные, цепные и
зубчатые передачи.
Структурный анализ механизмов
Основными элементами механизма являются звенья и кинематические пары. Звеном называется одно или несколько жестко соединенных твердых тел, входящих в состав механизма. Основные типы звеньев механизмов представлены в приложении 1. Звенья разделяются на входные и выходные. Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Звенья могут быть упругими (пружины, мембраны), гибкими (ремни, цепи, канаты), жидкими и газообразными (масло, вода, воздух). Кинематической парой называется подвижное соединение двух звеньев. Звенья пары могут соприкасаться по поверхностям, линиям и точкам. В зависимости то этого пары называются высшими и низшими (касание по поверхности). Существование пар обеспечивается условиями замыкания, сохраняющими постоянство контактов звеньев. Замыкание бывает геометрическим (обычно низшие пары) и силовым. Различают пары плоские, когда относительное движение звеньев происходит в параллельных плоскостях, и пространственные.
Основные виды механизмов – это рычажные, зубчатые и кулачковые. |
Ры- |
|
чажные механизм – |
это механизм, звенья которого образуют только вращатель- |
|
ные, поступательные, цилиндрические и сферические пары. Зубчатый |
ме- |
|
ханизм (зубчатая |
передача) - передаточный механизм, в котором подвижными |
|
звеньями являются зубчатые колеса, образующие со стойкой или водилом вращательные или поступательные пары. Кулачковый механизм – механизм, в состав которого входит кулачок. Кулачок имеет рабочую поверхность переменной кривизны и образует с взаимодействующим с ним звеном высшую пару.
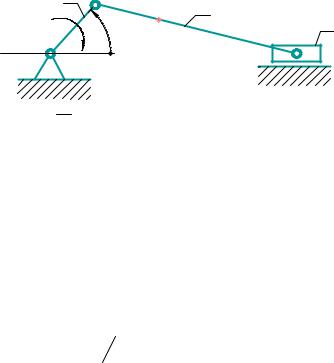
Кинематической цепью называют связанную систему звеньев, образующую кинематические пары. Открытая цепь та, в которой имеются звенья, входящие в
одну кинематическую пару. Пример на рисунке 2.2. |
|
|
Замкнутая цепь – цепь, у которой все звенья входят не менее чем в |
две па- |
|
ры. Механизм представляет собой |
частный вид кинематической цепи, у кото- |
|
рой одно звено обращено в стойку, |
а движение выходных звеньев |
вполне |
8

|
|
|
определяется заданным движением входных (ис- |
|
|
|
ключение для механизмов манипуляторов). Меха- |
О |
|
|
низмы бывают пространственные и плоские; ры- |
|
1 |
|
чажные, когда звенья образуют лишь низшие пары; |
|
|
шарнирные, когда имеются лишь вращательные па- |
|
|
2 |
А |
|
|
|
ры. Кинематические цепи разделяют на классы в за- |
|
|
|
|
|
3 |
|
В |
висимости от числа условий связи, налагаемых на |
|
|
|
относительное движение двух звеньев. Тело в про- |
Р и с . 2.2. Механизм |
странстве имеет шесть степеней свободы. Если обо- |
|
значить число связей налагаемых кинематической |
||
манипулятора |
||
парой через U, то |
||
|
W = 6 – U, |
(2.1) |
где W – относительное число степеней двух звеньев.
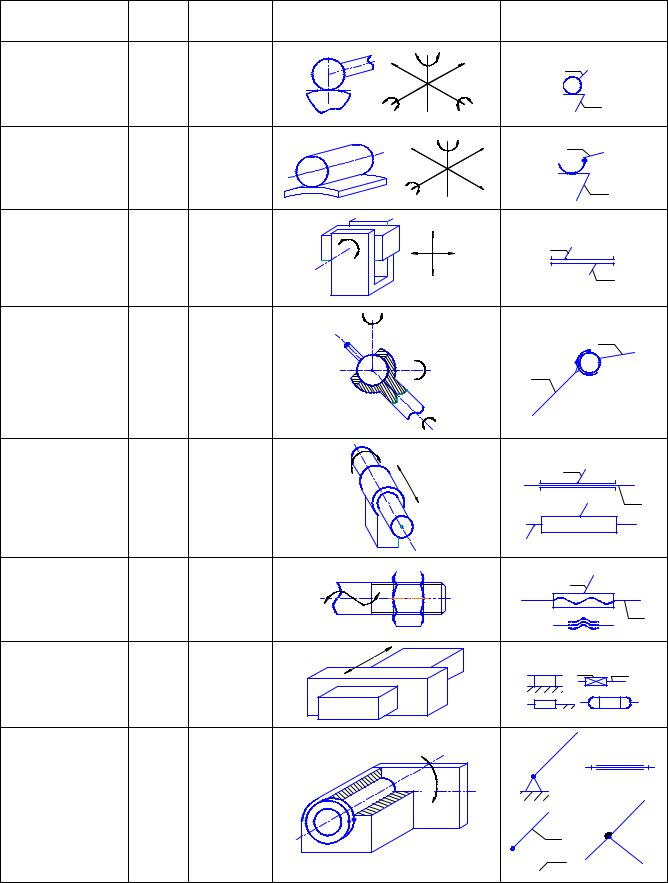
Кинематические пары обозначаются как Р1, Р2, …, Р5, т.е. пары 1, 2, …, 5 классов. Примеры различных кинематических пар представлены в таблице 1.2.
Степень свободы пространственных кинематических цепей подсчитывается по формуле Малышева (1923г.)
|
5 |
|
W = 6 n – 5 p5 – 4 |
p4 – 3 p3 – 2 p2 - p1 = 6 n - ∑ i×Pi , |
(2.2) |
|
i=1 |
|
где n – число подвижных звеньев. |
|
|
Степень подвижности плоской кинематической цепи подсчитывается по |
||
формуле Чебышева (1869г.) |
|
|
|
5 |
|
W = 3 n – 2 |
p5 – p4 = 3 n - ∑(i-3)Pi . |
(2.3) |
i=4
Примечание: на плоскости существуют только пары 4 и 5 классов, причем пары 5 класса являются низшими, т.е. касание звеньев происходит по поверхности. Это могут быть вращательные и поступательные пары. Каждая низшая пара рнп накладывает два условия связи, а высшая рвп одно.
Формула (2.3) верна лишь для статически определимых систем.
Согласно формуле Чебышева, плоский кривошипно-ползунный механизм (рис.2.1) имеет степень подвижности W = 1. За счет погрешностей при изготовлении и сборки возможны натяги в кинематических парах и деформации звеньев, т.е. возникают избыточные контурные связи q, число которых можно определить, если рассматривать механизм как пространственный
q = W – 6 n + 5p5 = 1 - 6×3 + 5×4 = 3
Для исключения этих трех избыточных связей следует применять более подвижные цилиндрические и сферические кинематические пары. Например, если пару в т.А представить как цилиндрическую, а в т.В как сферическую, то
9
|
|
|
|
|
Таблица 2.1 |
|
|
|
Классификация кинематических пар |
|
|||
Наименование |
Класс |
Подвиж- |
|
Схема пары |
Условные |
|
пары |
пары |
ность |
|
обозначения |
||
|
|
|||||
|
|
|
|
n |
1 |
|
Точечная |
1 |
5 |
|
|
||
t |
n t |
2 |
||||
|
|
|
||||
|
|
|
|
|
1 |
|
Линейная |
2 |
4 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
Плоская |
3 |
3 |
|
|
2 |
|
|
|
|
|
|
||
1
Сферическая |
3 |
3 |
2 |
|
|
|
1 |
|
Цилиндриче- |
4 |
2 |
2 |
|
ская |
||||
|
|
|
1
Винтовая |
5 |
1 |
2 |
|
|
|
|
Поступатель- |
|
1 |
2 |
5 |
1 |
|
|
ная |
|
||
|
|
|
Вращательная |
5 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1

 2
2
10