plc states - 12.34
12.4 PRACTICE PROBLEM SOLUTIONS
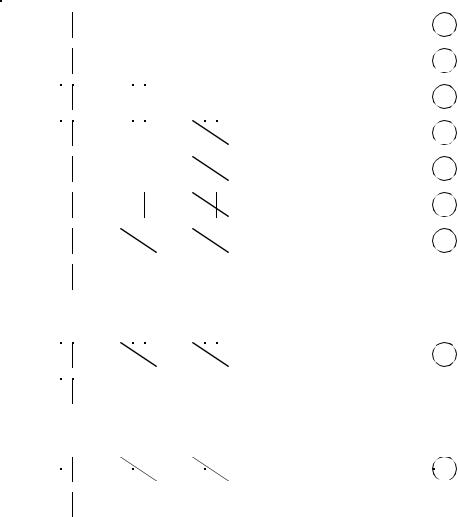
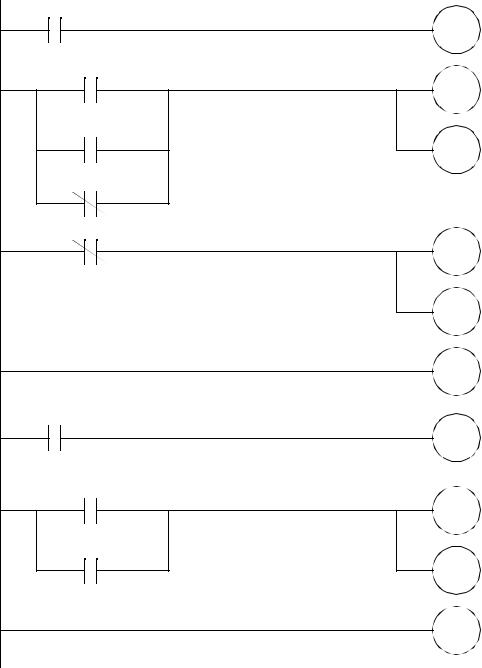
1.
IDLE |
Time Button |
|
Timer Done + Cancel Button + Door Open
COOK |
|
Time Button |
|
|
|
|
Cancel Button |
CLOCK |
|
SET |
|
|
|
|
|
|
Power Button |
Start Button
COOK
TIME SET
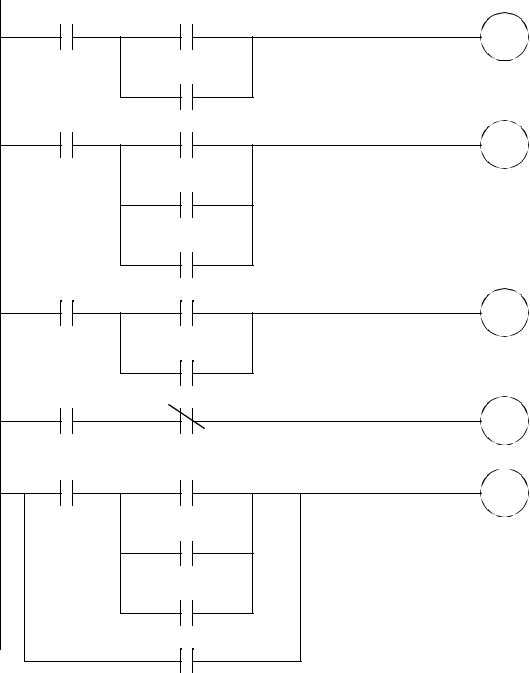
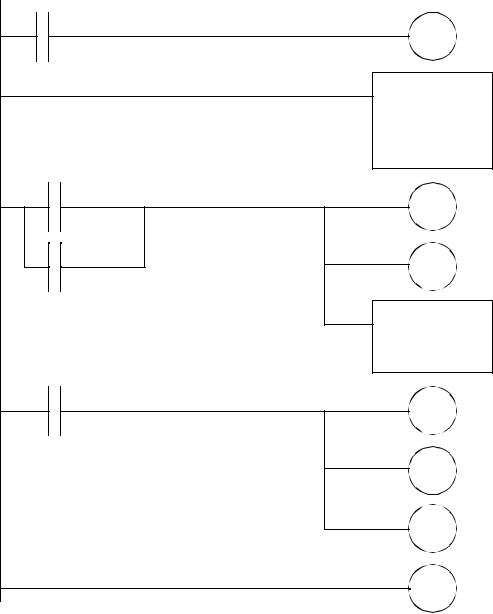
2.
T1 = FS |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
) |
|
|
|
S1 = ( S1 + T1 + T3 + T5) |
|
|
|
P = S1 + S2 |
||||||
T2 = S1( BA |
|
|
|
T2 |
T4 |
||||||||||||
T3 = S2( E( C + D + F) ) |
|
|
|
|
|
|
|
|
|
|
Q = S0 + S2 |
||||||
S2 = ( S2 + T2) T3 |
|||||||||||||||||
T4 = S1( |
|
|
|
) |
|
|
S0 = ( S0 + T4 |
|
|
) |
|
|
|
|
|
R = S0 + S1 |
|
F + E |
|
|
T2 |
T5 |
|
||||||||||||
T5 = S0( A( C + |
|
) ) |
|
|
|
|
|
|
|
|
|
|
|
||||
D |
|
|
|
|
|
|
|
|
|
|
|
||||||
plc states - 12.35
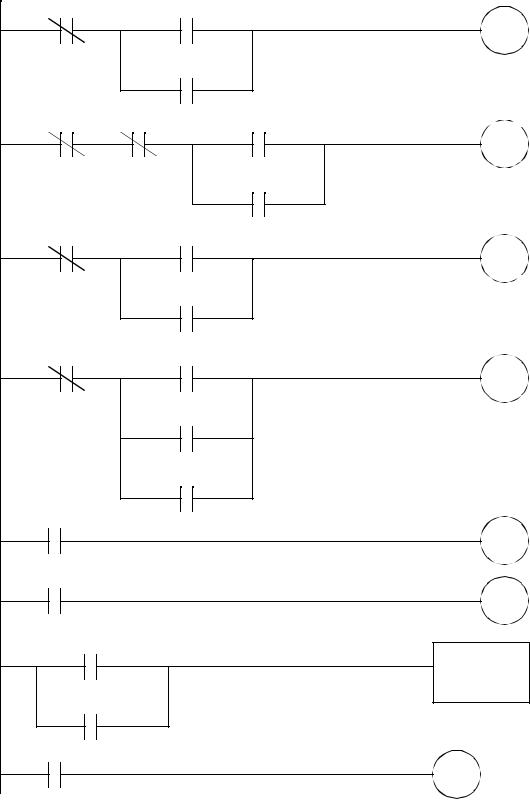
3.
|
T1 = ST1 • A |
|
|
|
|
|
ST1 = ( ST1 + T2 + T4 + T6) |
T1 |
|
T3 |
|
T5 |
|
|||||||||||||||||||||||||||||||
|
T2 = ST2 • |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
ST2 = |
( ST2 + T1 T3 T5) T2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
T3 = ST1 • |
C |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
ST3 = |
( ST3 + T3 |
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
T4 = ST3 • |
D |
|
|
|
|
|
T5 |
T4 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
ST4 = ( ST4 + T5 + FS) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
T5 = ST1 • E |
|
|
|
|
|
T6 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
T6 = ST4 • |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ST1 |
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ST2 |
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ST1 |
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ST3 |
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T4 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ST1 |
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T5 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ST4 |
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T6 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
ST1 |
|
|
|
|
|
|
|
|
|
|
|
T1 |
|
|
|
|
T3 |
|
|
|
T5 |
|
|
|
|
|
ST1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
ST2 |
|
|
|
|
|
|
|
|
|
|
|
T2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
T1 |
|
|
|
T3 |
|
|
T5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
ST3 |
|
|
|
|
|
|
|
|
|
|
|
T4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T3 |
|
|
|
T5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
ST4 |
|
|
|
|
|
|
|
|
|
|
|
T6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST4 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T5
FS

plc states - 12.36
4.
|
|
|
|
|
|
|
|
|
|
|
|
|
FS = first scan |
|||||||||||
|
|
|
|
|
|
A |
|
T1 = ST2 A |
||||||||||||||||
|
ST1 |
|
|
|
ST3 |
T2 = ST1 B |
||||||||||||||||||
|
|
|
|
|
|
|
C * B |
|||||||||||||||||
|
|
|
|
|
|
T1 |
|
T3 = ST3 ( C B) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
T3 |
|
T4 = ST2 ( C + B) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T4 |
ST1 = ( ST1 + T1) |
|
|
+ FS |
||||||||
|
B |
T2 |
|
|
|
|
|
|
T2 |
|||||||||||||||
|
|
|
|
|
|
|
|
ST2 = ( ST2 + T2 + T3) |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
ST2 |
C + B |
T1 |
T4 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
ST3 = ( ST3 + T4 T1) T3 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
ST2 |
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
T1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST1 |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST3 |
|
C |
B |
|
|
|
|
|
|
T3 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST2 |
|
|
|
C |
|
|
|
|
|
|
T4 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
T2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
ST1 |
|
|
|
|
|
|
ST1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
first scan |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T4 |
|
|
|
|
ST2 |
|
|
|
|
|
|
ST2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2
T3
T3
ST3 |
ST3 |
T4 

 T1
T1
plc states - 12.37
5.
TA = ST2 A |
|
|
|
ST1 = ( ST1 + TA + TC) |
TB |
|
TD |
|
|
||||||||||||||||
TB = ST1 B |
|
|
|
ST2 = ( ST2 + TB + TF) TA TE |
|||||||||||||||||||||
TC = ST3 |
C |
|
|
|
ST3 = ( ST3 + TD + TE) TC TF |
||||||||||||||||||||
TD = ST1 D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
TE = ST2 E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
TF = ST3 |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
ST2 |
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
TA |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST1 |
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TB |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST3 |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TC |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST1 |
|
|
|
|
|
|
|
|
D |
|
|
|
B |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TD |
|
|
|
ST2 |
|
|
|
|
|
|
|
|
E |
|
|
|
|
A |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TE |
|
|
|
ST3 |
|
|
|
|
|
|
|
|
F |
|
|
|
|
C |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST1 |
|
|
|
|
|
|
|
|
TB |
|
|
TD |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST1 |
|
|
|
TA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TC |
|
|
|
|
|
|
|
|
TA |
|
TE |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
ST2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST2 |
|
|
|
TB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST3 |
|
|
|
|
|
|
|
|
TC |
|
TF |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ST3 |
|
|
|
TD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

plc states - 12.38
6.
button A + button B
a)
door idle |
motor on |
|
door opening |
||
|
counter > 20,000
thermal relay + 15 sec delay
service mode
reset button - assumed
b) |
Legend |
|
|
button A |
I:001/01 |
||
|
|||
|
button B |
I:001/02 |
|
|
motor |
O:000/03 |
|
|
thermal relay |
I:001/03 |
|
|
reset button |
I:001/04 - assumed |
|
|
state 1 |
B3:0/0 |
|
|
state 2 |
B3:0/1 |
|
|
state 3 |
B3:0/2 |
|
|
lamp |
O:000/07 |

plc states - 12.39
|
|
first scan |
MCR |
|
|
|
|
|
|||
|
|
|
|
state 1 |
|
|
|
|
|
L |
|
|
|
|
|
||
|
|
|
|
state 2 |
|
|
|
|
|
U |
|
|
|
|
|
state 3 |
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
MCR |
|
|
|
state 2 |
|
motor |
|
|
|
|
|||
|
|
|
|
|
|
|
|
state 3 |
|
light |
|
|
|
|
|||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
state 1 |
MCR |
|
||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
button A |
L |
state 2 |
||
|
|
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
state 1 |
|
|
|
|
|
button B |
|
|
U |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MCR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
plc states - 12.41
|
|
|
state 3 |
MCR |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
reset button ?? |
L |
state 1 |
|
|
|
|
||||
|
|
|
||||
|
|
|
|
|
state 3 |
|
|
|
|
|
|
U |
|
|
|
|
|
|
||
|
|
|
|
|
counter |
|
|
|
|
|
|
RES |
|
|
|
|
|
|
MCR |
|
|
|
|
|
|
|
|
c)S0 = ( S0 + S1( delay( 15) + thermal) ) S0( buttonA + buttonB)
S1 = ( S1 + S0( buttonA + buttonB) ) S1( delay( 15) + thermal) S3( counter)
S3 = ( S3 + S2( counter) ) S3( reset)
motor = S1 light = S3
plc states - 12.43
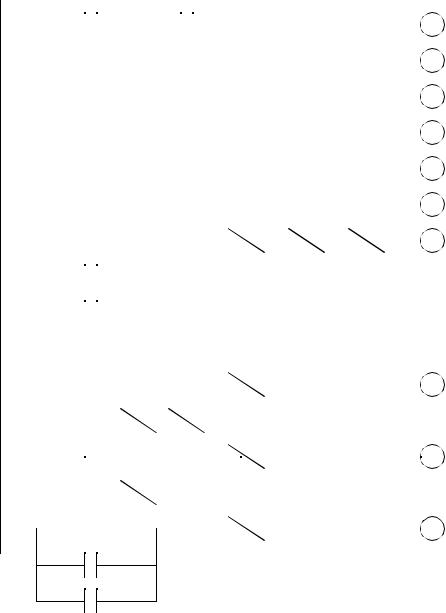
first scan |
|
L |
state 1 |
|
|
|
|
|
|
U |
state 2 |
|
|
|
|
|
|
U |
state 3 |
|
|
|
|
|
|
U |
state 4 |
|
|
|
|
state 2 |
|
|
close door |
state 4 |
|
|
open door |
state 2 |
TOF |
|
|
|
|
|
|
|
T4:0 |
|
|
|
preset 300s |
|
|
state 4 |
|
|
|
T4:0/DN |
|
garage light |
|
|
|
||
state 1 |
MCR |
|
|
|
|
|
|
remote |
U |
state 1 |
|
|
|
||
|
|
|
|
button |
L |
state 2 |
|
|
|
||
|
|
|
|
|
MCR |
|
|
plc states - 12.44
state 2 |
MCR |
|
|
|
|
remote |
U |
state 2 |
|
||
|
|
|
button |
L |
state 3 |
|
||
|
|
|
bottom limit |
|
|
light beam |
U |
state 2 |
|
||
|
|
|
|
L |
state 4 |
|
|
|
|
MCR |
|
state 3 |
MCR |
|
|
|
|
remote |
U |
state 3 |
|
||
|
|
|
button |
L |
state 4 |
|
||
|
|
|
|
MCR |
|

plc states - 12.45
state 4 |
MCR |
|
|
|
|
remote |
U |
state 2 |
|
||
|
|
|
button |
L |
state 3 |
|
||
|
|
|
top limit |
|
|
|
MCR |
|

plc states - 12.46
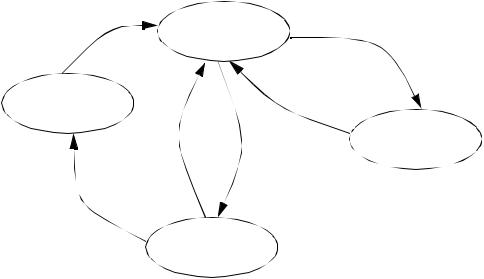
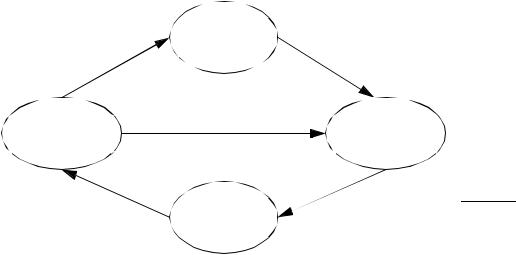
b) state-transition equations |
door |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
closed |
|
remote OR button |
|||
|
|
|
|
|
|
|
|
(state 3) |
|
|
|
|
|
remote OR button OR bottom limit |
|
|
|
|
|||||||||
door |
|
|
|
|
door |
||||||||
light sensor |
|
|
|||||||||||
closing |
|
|
|
|
|
|
|
|
|
opening |
|||
|
|
|
|
|
|
|
|
||||||
(state 2) |
|
|
|
|
(state 4) |
||||||||
remote OR button |
door |
|
|
remote OR button OR top limit |
|||||||||
opened |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
(state 1) |
|
|
|
|
|
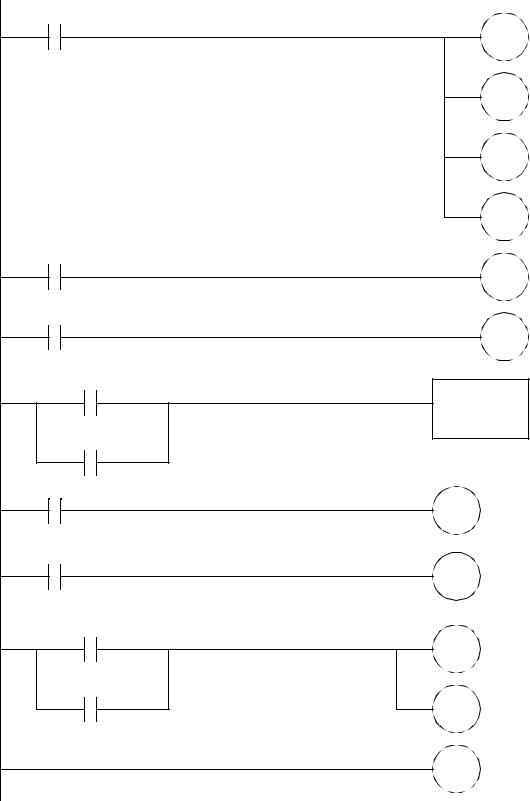
using the previous state diagram. |
|
|
|
|
|
||||||||
ST1 = state 1 |
T1 = state 1 to state 2 |
||||||||||||
ST2 = state 2 |
T2 = state 2 to state 3 |
||||||||||||
ST3 = state 3 |
T3 = state 2 to state 4 |
||||||||||||
ST4 = state 4 |
T4 = state 3 to state 4 |
||||||||||||
FS = first scan |
T5 = state 4 to state 1 |
||||||||||||
ST1 = ( ST1 + T5) |
|
|
|
|
|
|
T1 = ST1 ( remote + button) |
||||||
T1 |
|||||||||||||
|
|
|
|
|
|
|
|
T2 = ST2 ( remote + button + bottomlimit) |
|||||
ST2 = ( ST2 + T1) T2 T3 |
|||||||||||||
T3 = ST2 ( remote + button) |
|||||||||||||
ST3 = ( ST3 + T2) |
|
|
|
|
|
|
|
||||||
T4 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
T4 = ST3 ( lighbeam) |
|||||||
ST4 = ( ST4 + T3 + T4) |
|
|
|
||||||||||
T5 |
|
T5 = ST4 ( remote + button + toplimit) + FS |
|||||||||||