

1.17. Определение устойчивости систем автоматического регулирования с помощью частотного критерия устойчивости Найквиста.
Критерий устойчивости Найквиста: замкнутая система управления устойчива, если она устойчива в разомкнутом состоянии и при этом АФЧХ разомкнутой системы не охватывает точку на комплексной плоскости с координатами (-1; j0). Если же АФЧХ устойчивой разомкнутой системы охватывает точку с координатами (-1, j0), то замкнутая система неустойчива.
Для определения устойчивости САР замкнутую систему размыкают, находят амплитудно-частотные характеристики каждого звена и общую АЧХ системы:


Значение φ
приравнивают к -π
(значение на границе устойчивости),
отсюда находят значение критической
частоты
 .
Найденное значение подставляют в
выражение для амплитуды и вычисляют ее
значение. Если выполняется условие
.
Найденное значение подставляют в
выражение для амплитуды и вычисляют ее
значение. Если выполняется условие
 то
система устойчива.
то
система устойчива.
Таким образом, если усиление собственных колебаний в разомкнутой системе меньше единицы, то колебания затухают и система устойчива, а если усиление собственных колебаний в разомкнутой системе больше единицы, то колебания расходятся и система неустойчива.
1.18. Определение параметров настройки регулятора с помощью частотного критерия устойчивости Найквиста.
Критерий устойчивости Найквиста: замкнутая система управления устойчива, если она устойчива в разомкнутом состоянии и при этом АФЧХ разомкнутой системы не охватывает точку на комплексной плоскости с координатами (-1; j0). Если же АФЧХ устойчивой разомкнутой системы охватывает точку с координатами (-1, j0), то замкнутая система неустойчива.
С помощью частотного критерия устойчивости
Найквиста можно определить параметр
настройки регулятора
 Для этого систему размыкают, находят
амплитудные и частотные характеристики
системы:
Для этого систему размыкают, находят
амплитудные и частотные характеристики
системы:
Если есть значение запаса устойчивости
по амплитуде (ЗУА), то значение φ
приравнивают к -π
(значение на границе устойчивости),
отсюда находят значение критической
частоты
.
После чего находят значение
 из
выражения для амплитуды, причем аплитудная
характеристика системы равна 1-ЗУА.
из
выражения для амплитуды, причем аплитудная
характеристика системы равна 1-ЗУА.
Если есть значения запаса устойчивости по фазе (ЗУФ), то значение φ приравнивают к –π+ЗУФ, отсюда находят значение критической частоты . После чего находят значение из выражения для амплитуды, причем аплитудная характеристика системы равна 1 (значение на границе устойчивости).
1.19. Статические, нейтральные и неустойчивые объекты регулирования.

Если объект выходит на некое значение, то этот объект является устойчивым (статическим) объектом управления (1,2,3).
Если выходная величина у объекта изменяется с постоянной скоростью, то это нейтральный объект управления (4).
Если выходная величина изменяется с возрастающей скоростью, то это неустойчивый объект управления (5).
В случае устойчивого объекта управления степень самовыравнивания изменяется от 0 до ∞ (0 <p <∞).
Если степень самовыравнивания равна 0, то это нейтральный объект управления (p=0).
Если степень самовыравнивания меньше 0, то это неустойчивый объект управления (p <0).
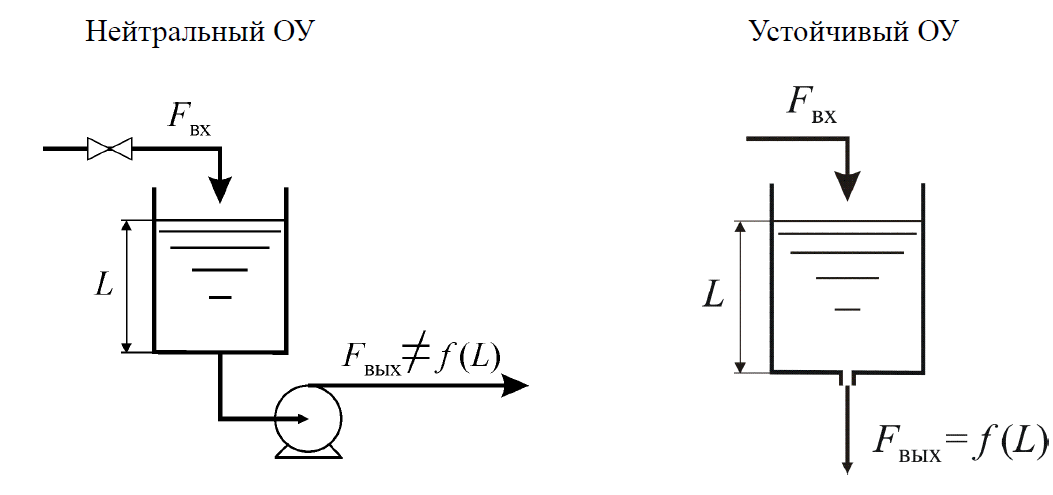
Нейтральный ОУ
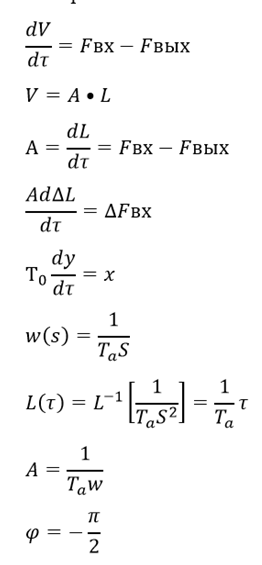

Устойчивый ОУ
