

1.15. Устойчивость систем автоматического регулирования.
Под устойчивостью понимают способность САУ восстанавливать свое состояние равновесия после устранения возмущающего воздействия. Различают три типа систем:
устойчивые системы после устранения возмущающего воздействия возвращаются в исходное состояние равновесия; в результате ступенчатого возмущающего воздействия устойчивая система или апериодически, или совершая затухающие колебания, переходит в новое состояние равновесия;
неустойчивые системы после устранения возмущающего воздействия апериодически удаляются от состояния равновесия или начинают совершать расходящиеся колебания;
нейтральные системы после устранения возмущающего воздействия или приходят в состояние равновесия, отличающееся от исходного, или совершают незатухающие колебания.
Устойчивость является одним из главных требований, предъявляемых к САУ, поскольку определяет ее работоспособность. Иначе говоря, неустойчивая система принципиально неработоспособна.
Чтобы определить, устойчиво ли состояние равновесия какой- либо системы, обычно изучают поведение этой системы при малых отклонениях от положения равновесия.
Поведение линейной стационарной системы в общем случае при наличии внешних воздействий

Свободная составляющая с течением времени должна стремиться к нулю. Свободная составляющая изменения выходной величины является общим решением однородного дифференциального уравнения, которое характеризует собственные динамические свойства системы.
Характеристическое уравнение системы
![]()
Корни характеристического уравнения в полной мере определяют устойчивость САУ.
Итак, линейная система устойчива, если все вещественные корни и вещественные части комплексных корней характеристического уравнения отрицательны.
Если характеристическое уравнение системы имеет только один нулевой корень, а все остальные корни имеют отрицательную вещественную часть: свободная составляющая решения с течением времени не затухает, а стремится к некоторому постоянному значению. Следовательно, такая система является нейтрально-устойчивой. О такой системе говорят также, что она находится на апериодической границе устойчивости.
Если характеристическое уравнение системы имеет только одну пару сопряженных мнимых корней, а все остальные корни имеют отрицательную вещественную часть, то свободная составляющая решения в этом случае совершает незатухающие колебания. Следовательно, такая система тоже является нейтрально-устойчивой (находится на колебательной границе устойчивости).
1.16. Предельное усиление регулятора и обеспечение запаса устойчивости.
Предельное усиление регулятора –
значение параметра регулятора
 на границе устойчивости системы, когда
САР и объект переходят в колебательный
режим.
на границе устойчивости системы, когда
САР и объект переходят в колебательный
режим.
Запас устойчивости необходим для обеспечения устойчивости системы. Различают запас устойчивости по амплитуде (ЗУА или ∆А) и запас устойчивости по фазе (ЗУФ или ∆φ).
ЗУА показывает, насколько должен увеличиться модуль частотной передаточной функции разомкнутой системы при критической частоте, чтобы замкнутая система оказалась на границе устойчивости. ЗУФ показывает, насколько должно увеличиться отставание по фазе в разомкнутой системе, чтобы замкнутая система оказалась на границе устойчивости.
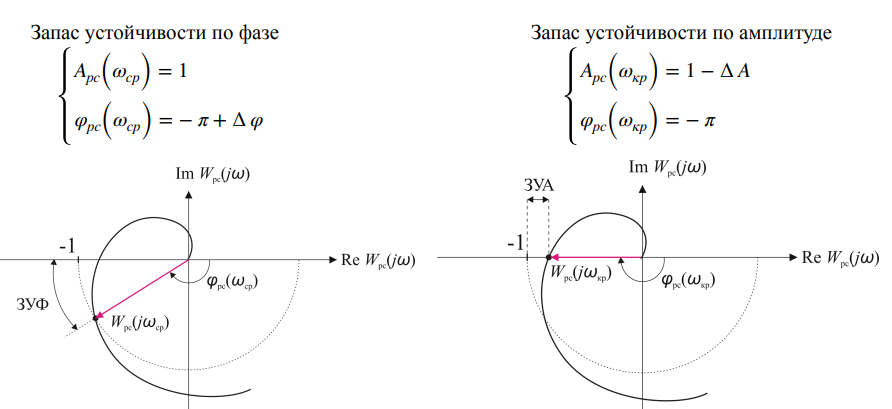
Одно из преимуществ использования запаса по фазе состоит в том, что определяемая при этом частота среза практически совпадает с частотой затухающих колебаний в замкнутой системе регулирования и может служить показателем быстродействия системы.