

1.11. Статические звенья второго порядка: уравнение, примеры, характеристики, основные свойства.
Статическим звеном второго порядка называется звено, входная и выходная величины которого связаны между собой линейным дифференциальным уравнением второго порядка:

Передаточная функция статического звена второго порядка
![]()
Переходная функция статического звена второго порядка

АЧХ статического звена второго порядка

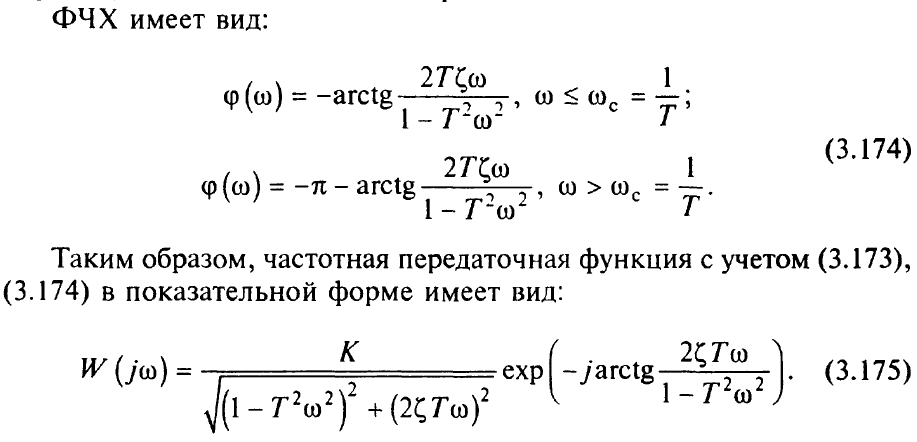
ЛАЧХ
![]()
1.12. Идеальное интегрирующее звено: уравнение, примеры, характеристики, основные свойства.
Звено называют интегрирующим (астатическим, нейтральным), если скорость изменения его выходной величины пропорциональна входной величине:
 ,
где
,
где
Та — постоянная времени интегрирования.
Выходная величина интегрирующего звена пропорциональна интегралу входной величины, т. е.
Передаточная функция интегрирующего звена

Переходная функция

Интегрирующее звено не обладает самовыравниванием, т. е. при небольшом изменении входного сигнала выходной сигнал интегрирующего звена начинает изменяться с постоянной скоростью и никогда не достигает нового установившегося состояния.
Частотная передаточная функция
![]()
Модуль АЧХ интегрирующего звена обратно пропорционален частоте колебаний

Так как выражение частотной передаточной функции не содержит действительной части, то фазовый сдвиг на всех частотах постоянен
![]()
Частотная передаточная функция интегрирующего звена в показательной форме

ЛАЧХ интегрирующего звена в децибелах

1.13. Звено запаздывания: уравнение, примеры, характеристики, основные свойства.
Звено запаздывания — это такое звено, которое не изменяет вид входного сигнала (точно повторяет), а лишь задерживает во времени.
Уравнение звена запаздывания
![]()
Явление запаздывания (так называемого транспортного запаздывания) имеет место в объектах управления, когда возмущающее воздействие, распространяясь в ОУ с конечной скоростью, вызывает изменение управляемого параметра лишь спустя некоторое время.
Частотная передаточная функция звена запаздывания


Передаточная функция звена запаздывания
![]()
АЧХ звена запаздывания равна единице и не зависит от частоты.

ФЧХ пропорциональна частоте с коэффициентом пропорциональности, равным -τзап.
![]()
В звене запаздывания имеет место отставание по фазе выходных колебаний от входных, пропорциональное частоте колебаний. Отставание по фазе звена запаздывания будет тем больше, чем больше время транспортного запаздывания и чем больше частота входных колебаний.
ЛАЧХ звена запаздывания
![]()
1.14. Дифференцирующие звенья: уравнение, примеры, характеристики, основные свойства.
Звено называется идеальным дифференцирующим, если его выходная величина пропорциональна скорости изменения входной величины.
 ,
где
,
где
Td — постоянная времени дифференцирования.
Передаточная функция идеального дифференцирующего звена
![]()
Переходная функция

Частотная передаточная функция идеального дифференцирующего звена
![]()
АЧХ идеального дифференцирующего звена
![]()
Фазовый сдвиг идеального дифференцирующего звена постоянен, положителен и при всех частотах равен +π/2
![]()
Частотная передаточная функция
![]()
Логарифмическая частотная характеристика идеального дифференцирующего звена
![]()