

907
.pdfБМРЗ-ДЗШ характеристика торможения приведена на рисунке 3. Ток торможения для терминала БМРЗ-ДЗШ согласно [1] определяется как:
Iторм |
|
1 |
|
|
*k |
|
. |
(1) |
|
|
|
||||||||
2 |
|||||||||
|
|
k |
|
||||||
Участки характеристики на рисунке 3 моделируются по неравенствам для горизонтального участка
II
торм
дифф
I
I
нт
нач
(2)
и для наклонного участка
I |
торм |
I |
нт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
I |
|
K |
|
I |
|
I |
|
. |
I |
|
|
|
|
|
|||||
|
дифф |
|
нач |
|
т |
|
торм |
|
нт |
|
(3)
Рисунок 3. Пример моделируемой характеристики торможения для терминала Механотроника БМРЗ-ДЗШ
Проверка логической схемы ДЗШ выполнена путём подачи на входы подсистемы разных сочетаний тормозного и дифференциального тока и контроля логического сигнала на выходе.
Вхарактеристику торможения также добавлена дифференциальная отсечка
иблокировка по второй гармонике, являющуюся уже известным методом для отстройки от токов небаланса, использующим косвенные признаки насыщения ТТ. Блокировка устанавливается путём выделения из дифференциального тока второй гармоники с помощью блока преобразования Фурье (Fourier) и сравнения этого тока в подсистеме характеристики торможения с уставкой, равной 0,15 о.е. Отключение произойдёт тогда, когда сработает один из заданных участков характеристики торможения согласно (2) или (3), а дифференциальный ток второй гармоники будет меньше заданной уставки. Для добавления токовой отсечки достаточно сравнить в обход всех блокировок и условий дифференциальный ток с уставкой, равной 6 о.е. Логическая схема характеристики торможения с токовой отсечкой и блокировкой по второй гармонике приведена на рисунке 4. Итоговая модель ДЗШ с торможением представлена на рисунке 5.
На этапе исследований определены параметры модели, влияющие на переходные режимы, и организован перебор различных сочетаний этих параметров с помощью цикла в скрипте MATLAB. В числе параметров, влияющих на работу ДЗШ, рассмотрены:
21

1.вторичная нагрузка на ТТ, от величины которой зависит степень их насыщения и форма вторичного тока;
2.остаточная индукция ТТ, от величины которой зависит степень их насыщения и форма вторичного тока;
3.начальная фаза ЭДС питающих систем, от которой зависит величина апериодической составляющей тока в момент начала КЗ.
Для понимания того, как далеко ДЗШ находится от состояния срабатывания при внешних КЗ, на график характеристики торможения добавлены зависимости дифференциального тока от тока торможения (небаланса).
Рисунок 4. Логическая схема характеристики торможения
Рисунок 5. Модель дифференциальной защиты шин с торможением
В модели MATLAB выполнена замена уставок защит на буквенные переменные с введением их в скрипт. Сформированы первый горизонтальный участок характеристики торможения (рисунок 3) путём задания набора точек по горизонтальной оси от нуля до тока Iнт и подъёмом этого набора точек по вертикальной оси на величину тока Iнач. Наклонный участок характеристики торможения сформирован путём задания диапазона токов торможения по горизонтальной оси от
22

тока Iнт до максимально возможного тока КЗ (6 о.е.) и задания диапазона дифференциальных токов по вертикальной оси с помощью формулы (3). Характеристика дифференциальной токовой отсечки добавлена на график аналогично первому участку характеристики торможения.
Создан цикл, который поочередно перебирает упомянутые выше параметры, влияющие на работу защиты, и запускает расчёт соответствующих этим параметрам режимов. Вторичная нагрузка на ТТ установлена равной 50% и 100% от номинальной нагрузки. Значения остаточной индукции принимались равными 100%, 50%, 0%, –50% и –100% от индукции насыщения ТТ. Для начального угла сдвига ЭДС фазы A блоков взяты значения 0º, 45º, 90º, 135º, 180º, 225º, 270º и 315º. В скрипт также добавлена возможность сохранения результатов расчёта в изображение с указанием всех изменяемых параметров и автоматического расчёта 800 режимов внешних КЗ для выявления тех из них, при которых ДЗШ срабатывает ложно. 800 режимов рассчитаны для каждого варианта оборудования.
На примере варианта схемы №2 из таблицы 1 получено, что в 626 из 800 режимов внешнего КЗ, рассчитанных в работе, ДЗШ срабатывала некорректно. Лишь в 174 случаях из-за отсутствия насыщения ТТ при близком внешнем КЗ защита работала правильно. Неправильные срабатывания преимущественно наблюдались при максимальной вторичной нагрузке на все ТТ и при неблагоприятном знаке остаточной индукции. Пример результата расчёта с некорректным срабатыванием защиты при внешнем КЗ приведён на рисунке 6. Для двух других вариантов схемы также получены числа правильных и неправильных действий защиты: в варианте №1 обнаружено 316 некорректных срабатываний и 484 правильных несрабатывания, в варианте №3 – 712 неправильных срабатываний и 88 корректных несрабатываний.
Рисунок 6. Пример некорректного срабатывания ДЗШ при внешнем КЗ – в левом столбце сверху вниз: осциллограммы трёхфазных токов в 4 плечах ДЗШ (i1 – i4), в правом столбце сверху вниз: графики изменения во времени трёхфазных дифференциальных токов (Id), токов торможения (It), логических сигналов срабатывания защиты и зависимость токов небаланса (Id) от токов торможения (It) по трём фазам
Для обеспечения правильной работы ДЗШ в режимах с насыщением ТТ предложено усовершенствование алгоритма защиты с применением блокировки от непосредственной причины возникновения тока небаланса – от апериодической составляющей тока, так как некорректные срабатывания ДЗШ появляются
23

преимущественно при насыщении ТТ из-за апериодической составляющей вторичного тока. После затухания апериодического тока данная блокировка разрешает действие защиты.
Также рекомендуется применение дифференциально-фазного органа (ДФО), осуществляющего сравнение токов в плечах ДЗШ по фазе [3]. Предлагаемый к применению ДФО является дополнительным критерием для различения внешнего и внутреннего КЗ. Когда угол между током наиболее мощного присоединения и суммарным током остальных присоединений меньше 90º, то это является признаком внутреннего КЗ, а когда тот же угол больше 90º – внешнего КЗ.
Предложенные усовершенствования добавлены в блок формирования дифференциального и тормозного токов, а затем в логическую схему характеристики торможения. При появлении блокирующего сигнала запрещается работа ступени с торможением. Также реализован блок замедления на возврат защиты «Off Delay» для продления сигнала защиты на отключение. Новизна данного решения состоит в совместном использовании данных принципов блокировки ДЗ, а не в виде отдельных органов.
Для проверки эффективности проведённых усовершенствований выполнен расчёт 8 режимов внутреннего КЗ при различных начальных фазах ЭДС системы и 800 режимов внешнего КЗ аналогично предыдущему этапу. Результат расчёта внутреннего КЗ с максимальным замедлением, которое составляет примерно 0,025 с от начала КЗ, показан на рисунке 7.
Рисунок 7. Пример корректного срабатывания ДЗШ при внутреннем КЗ – в левом столбце сверху вниз: осциллограммы трёхфазных токов в 4 плечах ДЗШ (i1 – i4), в правом столбце сверху вниз: графики изменения во времени трёхфазных дифференциальных токов (Id), токов торможения (It), логических сигналов срабатывания защиты и зависимость дифференциальных токов от токов торможения по трём фазам
На рисунке 8 представлен результат расчёта того же режима внешнего КЗ, что приведён ранее на рисунке 6, где наблюдалась некорректная работа защиты.
24

Как видно по логическому сигналу на рисунке 8, излишнее срабатывание ДЗШ при внешнем КЗ устранено.
Таким образом, в данной статье разработаны модели и предложены методы, позволяющие отстроить ДЗШ от тока небаланса при внешних КЗ и повысить за счёт этого надёжность её функционирования. Проведенное исследование режимов с усовершенствованной защитой показало, что применение блокировки по апериодической составляющей тока и ДФО во всех случаях помогает избавиться от некорректных срабатываний при внешних КЗ. При этом КЗ в зоне действия отключаются с достаточной чувствительностью, а замедление не превышает 0,025 с во всех рассмотренных режимах. Рекомендуется реализовать данное усовершенствование путём изменения алгоритмов цифровых терминалов ДЗШ и применения в терминалах ДЗШ измерительных преобразователей вторичного тока для контроля апериодической составляющей.
Рисунок 8. Пример корректного несрабатывания ДЗШ при внешнем КЗ – в левом столбце сверху вниз: осциллограммы трёхфазных токов в 4 плечах ДЗШ (i1 – i4), в правом столбце сверху вниз: графики изменения во времени трёхфазных дифференциальных токов (Id), токов торможения (It), логических сигналов срабатывания защиты и зависимость токов небаланса от токов торможения по трём фазам
Литература
1.Блок микропроцессорный релейной защиты БМРЗ-ДЗШ-02. Руководство по эксплуатации. Часть 2. ДИВГ.648228.080-08.02 РЭ1. – Режим доступа: https:// www.mtrele.ru/files/filedoc/releynaya-zashita/bmrz/bmrz-dzsh-02.pdf (дата обращения: 09.03.2022)4.
2.Булатов Ю.Н., Крюков А.В. Исследование кибербезопасности прогностических алгоритмов управления для установок распределенной генерации // Системы анализа и обработки данных. – 2021. – № 2(82). – С. 19-34. – DOI 10.17212/2782-2001-2021-2-19-34.2.
3.Висящев А.Н., Зайцева Н.А., Федосов Д.С. Повышение надежности работы цифровых дифференциальных защит в режимах с глубоким насыщением трансформаторов тока // Релейщик.
–2021. – № 3(41). – С. 14-19.5.
4.Кужеков С.Л., Дегтярев А.А., Дони Н.А., Шурупов А.А., Петров А.А., Костарев Л.Н., Кошельков И.А. Анализ неселективных действий дифференциальных защит сборных шин при внешних однофазных коротких замыканиях с насыщением трансформатора тока в неповрежденной фазе // Релейная защита и автоматизация. – 2019. – № 1(34). – С. 28-36.1.
5.Федосов Д.С., Тарасов И.А., Воронцов Д.В., Ворогушин Р.Р. Физико-математическое моделирование работы трансформаторов тока в переходных режимах // Повышение эффективности производства и использования энергии в условиях Сибири: материалы Всероссийской научнопрактической конференции с международным участием (Иркутск, 21-25 апреля 2015 г.). – Иркутск: ИрГТУ, 2015. – С. 67-71.3.
25
ENSURING THE CORRECT OPERATION OF THE DIGITAL BUSBAR DIFFERENTIAL PROTECTION DURING EXTERNAL SHORT CIRCUITS
Ya.I. Artemyeva, R.E. Dementyev, S.A. Dodatko, A.S. Seleznev, D.S. Fedosov
FSBEI HE «INRTU»
Irkutsk, Russian Federation
Abstract. The problem of incorrect operation of differential protection of busbars in case of external short circuits is considered. In the MATLAB Simulink environment, models have been developed for busbars with six feeders, current transformers, and digital differential protections. A study was made of the protections behavior in transient conditions of external short circuits, which confirmed the high probability of busbar protections excessive operation in case of these faults. It is proposed to improve the protections through the use of blocking by the DC component of the differential current and the use of a phase comparison principle. The effectiveness of the improvement is confirmed on the protection models.
Keywords: MATLAB, relay protection, busbar differential protection, current transformer.
Об авторах
Артемьева Яна Ильинична (Иркутск, Россия) – студент (бакалавриат) кафедры электрических станций, сетей и систем, ФГБОУ ВО «Иркутский национальный исследовательский технический университет», e-mail: yartem102001 @gmail.com.
Дементьев Роман Евгеньевич (Иркутск, Россия) – студент (бакалавриат) кафедры электрических станций, сетей и систем, ФГБОУ ВО «Иркутский национальный исследовательский технический университет», e-mail: dementiev. roman2013@yandex.ru.
Додатко Софья Алексеевна (Иркутск, Россия) – студент (бакалавриат) кафедры электрических станций, сетей и систем, ФГБОУ ВО «Иркутский национальный исследовательский технический университет», e-mail: soffyad@list.ru
Селезнев Алексей Спартакович (Иркутск, Россия) – кандидат технических наук, доцент кафедры электрических станций, сетей и систем, ФГБОУ ВО «Иркутский национальный исследовательский технический университет», e-mail: seleznevas.ru@mail.ru.
Федосов Денис Сергеевич (Иркутск, Россия) – кандидат технических наук, доцент, заведующий кафедрой электрических станций, сетей и систем, ФГБОУ ВО «Иркутский национальный исследовательский технический универ-
ситет», e-mail: fedosov_ds@istu.edu.
УДК 621.868.238.66
М.И. Ахметов, М.Ю. Старухина, И.В. Зуб; ФГБОУ ВО «ГУМРФ имени адмирала С.О. Макарова», Санкт-Петербург, Российская Федерация
ВНЕДРЕНИЕ АВТОМАТИЧЕСКИХ УПРАВЛЯЕМЫХ ТЕЛЕЖЕК (AGV) В КОНТЕЙНЕРНЫЕ ТЕРМИНАЛЫ
Аннотация. В мировой практике все чаще прибегают к автоматизированным системам с намерением облегчить работу человека. Прогресс не стоит на месте, и разрабатываются новые машины для обработки контейнеров. На смену тя-
26

гачам с полуприцепами-контейнеровозами приходит новое оборудование – автоматические управляемые платформы AGV.
Ключевые слова: техника, оборудование, машина, тележка, платформа, контейнер, порт, терминал, тягачи, AGV.
Автоматическая управляемая тележка (AGV – Automatic Guided Vehicle) – транспортер с электроприводом, который предназначенный для перемещения тяжеловесных грузов – контейнеров, внутри порта. Тележка автоматическая, а это значит, что для ее обслуживания не нужен отдельный оператор, как, например, в тягаче с прицепом. Тележки перемещаются в автономном режиме без участия человека по заданному маршруту, который строится системой RMS (Robotic Management System). AGV снабжена всеми необходимыми системами и датчиками безопасности. Транспортер может эксплуатироваться в местах большого количества скопления людей и других двигающихся AGV [4, 5]. Общий вид AGV представлен на рисунке 1.
Рисунок 1. Автоматическая управляемая тележка (AGV) Основные направления работы:
движение по определенно заданному маршруту, включая развилки и другие дорожные узлы;
поддержание постоянной скорости, как с грузом, так и без него;
остановка и продолжение передвижения, как в заранее определенных позициях, так и «по требованию» оператора;
беспроводная связь с другими AGV или центральным терминалом для создания сети, в которой тележки могут ориентироваться относительно других тележек;
картографирование неподвижных препятствий для проезда «в узких пространствах»;
распознавание перемещающихся препятствий, ожидание исчезновения их и продолжение работы дальше.
Принцип работы AGV.
В качестве сравнения возьмем тягач с полуприцепом-контейнеровозом. В отличие от него AGV не требует участие человека, так как управление осуществляется с помощью специальной программы (рис. 2).
27
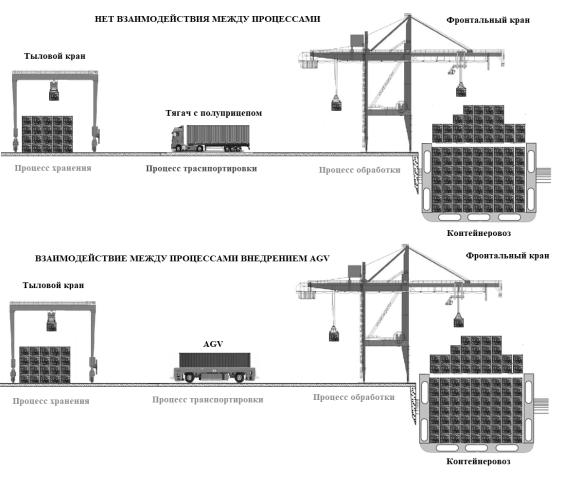
Рисунок 2. Схема принципа работы тягача и AGV
AGV следует по предварительно запланированному маршруту – к судну для принятия контейнера и перемещения его на склад или наоборот. В соответствии со стандартами безопасности внутри терминала, во время движения тележка подает светозвуковой сигнал. За безопасность во время движения тележки отвечает лазерный сканер. В случае обнаружения сканером препятствия AGV останавливается и издает звуковой сигнал. Технические характеристики представлены в таблице 1.
Таблица 1
Технические характеристики AGV
Показатель |
|
Значение |
|
|
|
Длина |
|
14,8 м |
|
|
|
Ширина |
|
2,8 м |
|
|
|
Высота |
|
1,7 м |
|
|
|
Масса тележки |
|
25 т |
|
|
|
Грузоподъемность |
|
70 т |
|
|
|
Скорость передвижения |
|
1-2 м/с |
|
|
|
Температура эксплуатации |
|
-40…+50 |
|
|
|
Система управления |
|
Цифровой контроллер |
|
|
|
Питание |
|
Тяговые аккумуляторные батареи |
|
|
|
|
28 |
|
Проведем сравнение двух систем: RTG + терминальные тягачи и RTG + AGV. В случае этих двух систем штабелирование контейнеров производится с помощью пневмоколесных козловых кранов (RTG), однако транспортирование контейнеров внутри терминала в первом случае выполняется с помощью терминальных тягачей, а во втором случае с помощью автоматических транспортных платформ.
В первом случае причальный перегружатель захватывает контейнеры с судна-контейнеровоза и помещает контейнеры на терминальные тягачи, которые транспортируют контейнеры к складу, где пневмоколесные козловые краны (RTG) штабелирует контейнеры в длинные блоки. Данная система обеспечивает сравнительно высокую плотность штабелирования.
Во втором же случае схема идентична, но вместо тягачей используются AGV. Данная схема имеет ряд отличий по сравнению с первой, представленных в таблице 2. Также важно помнить, что в целях безопасной эксплуатации при автоматизации терминала необходимо соблюдать строгое разграничение между участками терминала, на которых используется автоматизированное оборудование, и участками с оборудованием, управляемым людьми.
|
|
Таблица 2 |
|
|
Сравнение систем |
|
|
|
|
|
|
Показатель |
RTG + тягачи |
RTG + AVG |
|
Плотность складирования кон- |
1000 |
1100-1200 |
|
тейнеров, TEU/га |
|||
|
|
||
Инвестиционные капиталовло- |
Средние |
Очень высокие |
|
жения |
|||
|
|
||
Гибкость системы к изменениям |
Относительно высокая |
Невысокая |
|
Необходимость наличия больно- |
Есть |
Нет |
|
го количества персонала |
|||
|
|
||
Наличие человеческого фактора |
Присутствует |
Исключен |
|
|
Достаточная простота |
Высокая производитель- |
|
Иные достоинства |
ность. Высокая работоспо- |
||
системы. Доступность |
|||
|
собность |
||
|
|
||
|
Высокие трудовые за- |
Необходимы высококва- |
|
Иные недостатки |
лифицированные рабочие |
||
траты |
|||
|
кадры |
||
|
|
Таким образом, оптимальную систему перемещения контейнеров внутри терминала необходимо выбирать с учетом характеристик, которые наиболее важны в каждом конкретном случае. Данные системы имеют свои плюсы и минусы и при выборе решений необходимо опираться на результат, который необходимо получить [3].
Принцип навигации AGV.
Существуют несколько методов навигации автоматических тележек. У каждого из методов есть свои достоинства и недостатки.
1. Навигация по магнитной ленте.
На поверхность пола наклеивается магнитная лента (не препятствующая проезду транспорта), по которой осуществляется движение. Это наиболее востребованный и дешевый метод, в качестве навигации. Преимуществом метода является возможность создания новых развилок, остановок и поворотов. Недостатком
– истираемость ленты в условиях эксплуатации.
29

2. Навигация с помощью WiFi.
Такая система работает без меток и внешних ориентиров, вся система позиционирования базируется на WiFi. Преимуществом этого метода заключается в том, что система функционирует практически бесперебойно. Но и главным недостатком является уязвимость к средствам подавлениям сигнала – глушилкам.
Автоматическая управляемая тележка самое прогрессивное решение для складских площадок. Тележка обладает высокой маневренностью, что позволяет ей спокойно перемещаться внутри склада. Такая складская машина позволяет перемещать контейнеры в самых ограниченных пространствах. Точность позиционирования составляет не более 25 мм. Благодаря высокой маневренности AGV способна начать движение «прямо с места» [4].
Преимущества AGV:
полностью автоматизированная, точная и быстрая работа;
помогает оптимизировать размер автопарка благодаря более эффективному использованию мощностей;
оптимизация затрат на персонал;
исключение ошибок вследствие человеческого фактора;
гибкость и мобильность системы;
минимальные затраты в случае изменения конфигурации маршрута;
повышение экологической эффективности [6].
Рисунок 3. Работа AGV. Порт Роттердам
Применение AGV тележек показано на рисунке 3 в порту Роттердама. Порт начал работать с 58 машинами, а в настоящее время использует парк объемом около 150 единиц [2].
Внедрение AGV в контейнерные терминалы РФ.
По итогам 2021 года грузооборот российских морских портов составил 835,2 млн тонн (рост на 1,7 % по сравнению с 2020 г.). Динамика грузооборота морских портов РФ представлена на рисунке 4. Рассматривая текущую ситуацию и опираясь на официальные сведения Ассоциации морских торговых портов, можно сделать вывод о том, что динамика объема грузооборота российских портов в последние годы показывает устойчивый рост. Экспертами прогнозируется дальнейший рост до 2030 года. Такой рост возможно обеспечить за счет влияния
30