

156
.pdf
|
A |
A |
... |
A |
|
|
|
11 |
12 |
... |
1n |
|
|
А* = |
A21 |
A22 |
A2n |
, |
||
... ... |
... |
... |
|
|||
|
An1 |
An2 |
... |
|
|
|
|
Aпn |
|
||||
Матрица А−1 называется обратной по отношению к матрице A , если выполняется условие
А× А−1 = А−1 × А = Е ,
где E — единичная матрица того же порядка, что и матрица A . Матрица А−1
имеет те же размеры, что и матрица A .
Теорема 3. Всякая невырожденная матрица имеет обратную, которая вычисляется следующим образом
A−1 = 1 × (A* )T ,
A
где A - определитель матрицы, А* — союзная матрица.
Свойства обратной матрицы:
1. A−1 = 1 ;
A
2.( A × B)−1 = B −1 × A−1 ;
3.(A−1 )T = ( AT )−1 .
3.2.Способы нахождения обратной матрицы
1)«Классический» метод (с помощью алгебраических дополнений);
2)Метод Гаусса (с помощью элементарных преобразований).
22
Классический метод
(с помощью алгебраических дополнений)
1)Вычисление определителя матрицы A ;
2)Нахождение алгебраических дополнений Aij ;
3)Построение союзной матрицы А* ;
4)Нахождение обратной матрицы;
5) Проверка А× А−1 = А−1 × А = Е .
|
1 |
2 |
4 |
|
Пример 20. Найти обратную матрицу для А = |
0 |
2 |
4 |
. |
|
|
−1 |
|
|
3 |
2 |
|
||
Решение.
|
|
1 |
2 |
4 |
|
|
|
|
8 |
12 |
-6 |
|
|
|
|
|
|||||||||
1) D = |
|
0 |
2 |
4 |
= 8 ¹ 0 . 2,3) |
* |
= |
|
-8 |
-10 |
7 |
|
|
А |
|
. |
|||||||||
|
|
3 |
-1 |
2 |
|
|
|
|
0 |
-4 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
-8 0 |
|
|
1 |
|
-1 |
|
|
|
0 |
|
|
|
||||||
|
|
−1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4) А |
|
|
= |
|
|
× |
|
12 |
|
-10 -4 |
= |
3 / 2 |
-5 / 4 |
|
-1 / 2 |
. |
|
|
||||||||||
|
|
8 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
-6 |
|
|
7 |
2 |
|
|
-3 / 4 7 / 8 |
|
|
1 / 4 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
-1 |
|
0 |
1 |
2 4 |
|
1 0 |
|
0 |
|
|||||||
5) А |
−1 |
A = |
|
3 / 2 |
|
-5 / 4 -1 / 2 |
|
|
0 |
2 4 |
|
|
|
0 1 |
|
0 |
|
и |
||||||||||
|
|
|
|
× |
|
= |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
-3 / 4 |
|
|
7 / 8 |
1 / 4 |
|
|
3 |
-1 2 |
|
|
|
0 0 |
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 2 |
4 1 |
|
-1 |
|
|
0 |
1 |
|
0 0 |
|
|
|||||||||||||
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
-5 / 4 -1/ 2 |
|
|
|
|
|
|
|
|
|
|||||
AА |
|
|
= |
0 2 |
4 |
|
× |
3 / 2 |
|
= |
0 |
|
1 0 |
. |
|
|
||||||||||||
|
|
|
|
|
3 |
|
-1 |
2 |
|
|
-3 / 4 7 / 8 |
|
|
1 / 4 |
|
|
0 |
|
0 1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
23
Метод Гаусса
(с помощью элементарных преобразований)
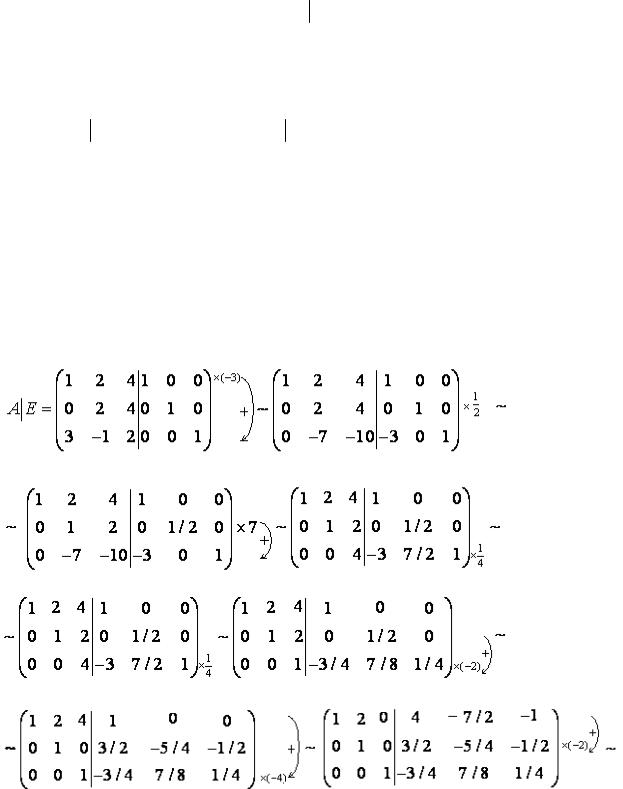
1)Составление матрицы A E (к матрице A справой стороны приписывается единичная матрица E той же размерности, что и матрица A ).
2)С помощью элементарных преобразований над строками матрицы A E приводят ее к виду E A−1 .
3)Справа будет получена обратная матрица.
|
1 |
2 |
4 |
|
|
|
|
|
|
Пример 21. Найти обратную матрицу для А = 0 |
2 |
4 |
. |
|
|
3 |
− 1 |
2 |
|
|
|
|||
Решение.
24
4.Системы линейных уравнений
4.1.Основные понятия
Линейными операциями над какими-либо объектами называются их
сложение и умножение на число.
Линейной комбинацией переменных называется результат применения к ним линейных операций, т. е.
α1x1 + α2 x2 + K + αn xn ,
где αi числа, xi − переменные.
Линейным уравнением называется уравнение вида
a1x1 + a2 x2 + K + an xn = b ,
где ai и b – числа, xi – неизвестные.
Линейное уравнение называется однородным, если b = 0 . В противном случае уравнение называется неоднородным.
Системой линейных уравнений (линейной системой) называется
система вида
a11x1 + a12 x2 + ... + a1n xn = b1 |
|
|||
|
+ a x |
+ + a x = b |
|
|
a x |
, |
|||
21 1 |
22 2 |
2n n |
2 |
|
.............................................. |
|
|||
a x + a x + ... + a x = b |
|
|||
m1 1 |
m2 2 |
mn n |
m |
|
|
25 |
|
|
|

где числа aij называются коэффициентами системы, числа bi — свободными членами, xi – неизвестные переменные, n – число неизвестных, m – число уравнений.
Такую систему удобно записывать в компактной матричной форме
А× Х = В.
Здесь A — матрица коэффициентов системы, называемая основной
а11
матрицей: А = а21
...
ат1
b1
неизвестных, B = b2 —...
bm
а12 |
... |
а1п |
|
х1 |
|
|
|
|
а22 |
... |
а2п |
, |
Х = х2 |
|
— |
вектор-столбец из |
|
... |
... |
... |
|
|
... |
|
|
|
ат2 |
... |
атп |
|
|
хп |
|
|
|
вектор-столбец из свободных членов.
Расширенной матрицей системы называется матрица АВ системы,
дополненная столбцом свободных членов
a11
=a21
АВ ...
am1
a |
... |
a |
|
b |
|
|
|||||
12 |
... |
1n |
|
1 |
|
a22 |
a2n |
|
b2 |
|
|
... |
... ... |
|
... . |
||
a |
... |
a |
|
b |
|
|
|
||||
m2 |
|
mn |
|
m |
|
|
|
||||
Решением линейной системы называется набор чисел x1 , x2 ,Kxn ,
которые при подстановке вместо неизвестных обращают каждое уравнение системы в верное равенство.
Линейная система может иметь единственное решение, бесконечно много решений или не иметь ни одного решения.
26
Система уравнений называется совместной, если она имеет, хотя бы одно решение, и несовместной, если она не имеет ни одного решения.
Совместная система называется определенной, если она имеет единственное решение, и неопределенной, если она имеет более одного решения. В последнем случае каждое ее решение называется частным решением системы. Совокупность всех частных решений называется общим
решением.
Решить систему — это значит выяснить, совместна она или несовместна. Если система совместна, найти ее общее решение.
Две системы называются эквивалентными (равносильными), если они имеют одно и то же множество решений. Другими словами, системы эквивалентны, если каждое решение одной из них является решением другой,
и наоборот.
Эквивалентные системы получаются при элементарных преобразованиях системы при условии, что преобразования выполняются лишь над строками матрицы.
Элементарными преобразованиями системы уравнений называют
следующие преобразования:
•перестановка любых двух уравнений;
•умножение обеих частей любого уравнения на любое число, отличное от нуля;
•прибавление к обеим частям одного из уравнений соответствующих частей другого, умноженных на любое число.
Система линейных уравнений называется однородной, если все
свободные члены равны нулю:
27
a11x1 + a12 x2 + ... + a1n xn = 0 |
||||
|
|
|
|
= 0 |
a21x1 + a22 x2 + ... + a2n xn |
||||
.............................................. . |
||||
|
|
|
|
|
a x + a x + ... + a x = 0 |
||||
|
m1 1 |
m2 2 |
mn n |
|
Однородная система |
всегда |
совместна, |
так |
как x1 = x2 = K = xn = 0 |
является решением системы. Это решение называется нулевым или
тривиальным.
4.2.Решение систем линейных уравнений методом Гаусса
Одним из наиболее универсальных и эффективных методов решений линейных алгебраических систем является метод Гаусса, состоящий в последовательном исключении неизвестных.
Пусть дана система уравнений
a x + a x ...+ + a x = b |
||||
|
11 1 |
12 2 |
1n n |
1 |
a21x1 + a22 x2 ...+ + a2n xn = b2 |
||||
............................................... |
||||
|
|
|
|
|
a |
x + a x ...+ + a |
x = b |
||
|
n1 1 |
n2 2 |
nn n |
n |
Процесс решения по методу Гаусса состоит из двух этапов. На первом этапе выписывается расширенная матрица, которая приводится к ступенчатому виду (в частности, треугольному, это матрица, у которой под главной диагональю все нули).
На втором этапе производится переход от расширенной матрице обратно к системе, затем идет последовательное определение неизвестных переменных из последней строки системы, поднимаясь по ступени вверх.
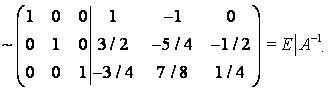
x + 3y − z = 4
Пример 22. Решить систему методом Гаусса: 2x − y − 5z = −15
5x + y + 4z =19
28
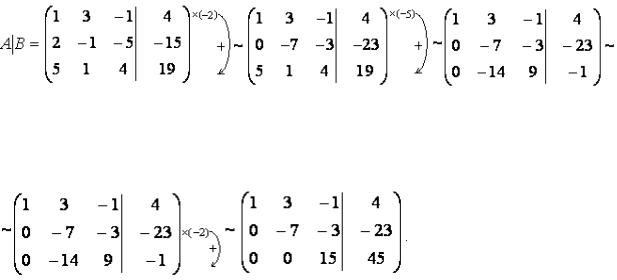
Решение.
Записываем расширенную матрицу. Затем первое уравнение умножим на -2 и прибавим ко второму, и первое умножим на -5 и прибавим к третьему.
Получим
Теперь прибавим ко второму уравнению, умноженному на -2, третье уравнение. Получим
По ступенчатому виду расширенной матрицы выписываем систему
x + 3y − z = 4 |
|
|
|
|
|
уравнений: −7 y − 3z = −23 . Отсюда z = 3 , y = 2 , |
x = 1 |
– |
единственное |
||
|
15z = 45 |
|
|
|
|
|
|
|
|
|
|
решение системы. |
|
|
|
|
|
|
|
2х1 − х2 + 3х3 − 5х4 = 1 |
|||
|
|
х1 − х2 − 5х3 = 2 |
|||
|
|
||||
Пример 23. Решить систему методом Гаусса: |
3х − 2х − 2х − 5х = 3 |
||||
|
|
||||
|
1 |
2 |
3 |
4 |
|
|
7х − 5х − 9х −10х = 8 |
||||
|
|
1 |
2 |
3 |
4 |
Решение.
В результате элементарных преобразований над расширенной матрицей системы получим
29

По ступенчатому виду расширенной матрицы выписываем систему
|
|
х1 − х2 − 5х3 = 2 |
||||
уравнений: |
х |
+13х |
|
− 5х = −3 . Выражаем из второго уравнения неизвестную |
||
|
|
2 |
3 |
|
4 |
|
переменную |
|
|
х2 , |
т.е. |
х2 = 5х4 − 13х3 − 3 . Затем подставляем в первое |
|
уравнение х2 |
и выражаем неизвестную переменную х1 , т.е. х1 = 5х4 − 8х3 − 1 , |
|||||
получаем общее решение системы линейных уравнений. Если положить,
например, x3 = 0 , x4 = 0 то найдем одно из частных решений этой системы
(−1;−3;0;0) .
4.3.Решение систем линейных по правилу Крамера
Рассмотрим систему трех уравнений первой степени с тремя
a x + a y + a z = b |
||||||||||
|
11 |
|
12 |
13 |
|
1 |
|
|||
неизвестными a21 x + a22 y + a23 z = b2 . |
||||||||||
a |
31 |
x + a |
32 |
y + a |
33 |
z = b |
||||
|
|
|
|
|
|
3 |
|
|||
|
|
|
= |
|
а11 |
|
а12 |
а13 |
|
|
|
|
|
|
|
|
|||||
Определитель |
|
а21 |
а22 |
а23 |
, составленный из коэффициентов |
|||||
|
|
|
|
|
|
а31 |
а32 |
а33 |
|
|
при неизвестных данной системы, называется главным определителем этой
системы.
30
Определитель |
x |
получается из определителя ∆ путем замены первого |
|||||||||||||||||
столбца коэффициентов при |
искомом |
x столбцом |
свободных |
членов. |
|||||||||||||||
Определители y |
и |
z получают из определителя |
системы ∆ |
заменой |
|||||||||||||||
второго и третьего столбцов коэффициентов при y и z |
столбцом свободных |
||||||||||||||||||
членов, соответственно. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
х = |
|
b1 |
а12 |
а13 |
|
y = |
|
а11 |
b1 |
а13 |
|
, z = |
|
а11 |
а12 |
b1 |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
b2 |
а22 |
а23 |
, |
|
а21 |
b2 |
а23 |
|
|
а21 |
а22 |
b2 |
|
. |
||||
|
|
b3 |
а32 |
а33 |
|
|
|
а31 |
b3 |
а33 |
|
|
|
|
а31 |
а32 |
b3 |
|
|
Рассмотрим следующие возможные случаи.
1. D ¹ 0 Тогда решение системы находим как
x = |
x |
; y = |
D y |
; z = |
D |
z |
, |
|
|
|
|
при этом полученные формулы называются формулами Крамера.
2. |
Если |
= 0 , а |
2x + |
2y + |
2z |
> 0, т.е. по крайней мере один из Dx , D y |
или Dz |
отличен от нуля, тогда |
система не имеет решений (система |
||||
несовместна). Пусть, например, Dx |
¹ 0 . Тогда из неравенства следует, что |
|||||
D × x = Dx |
или 0 × x = Dx , что невозможно. |
|||||
3. |
Если |
= 0 и |
x = |
y = |
z |
= 0 , то система, либо не имеет решения, |
либо имеет бесконечное множество решений. |
||||||
|
|
|
|
|
|
2x − 4 y + z = 3 |
Пример 24. Решить систему x − 5 y + 3z = −1. |
||||||
|
|
|
|
|
|
x − y + z = 1 |
|
|
|
|
|
|
|
Решение.
31