

книги / Цифровая обработка сигналов
..pdf
|
|
|
N |
|
H (z) |
Y (z) |
|
ts b(k)z k |
. |
k 0 |
||||
|
M |
|||
|
X (z) |
|
||
|
1 a(k)z k |
|
||
|
|
|
k 1 |
|
Этап 7. Представить разностное уравнение БИХ-фильтра следующим образом:
y(n) ts [b(0)x(n) b(1)x(n 1) ... b(N )x(n N )]
N |
M |
a(1) y(n 1) ... a(M )x(n M ) ts b(k)x(n k) a(k) y(n k). |
|
k 0 |
k 1 |
Обратите внимание, что при переходе от передаточной функции к разностному уравнению знаки коэффициентов a(k) меняются на противоположные.
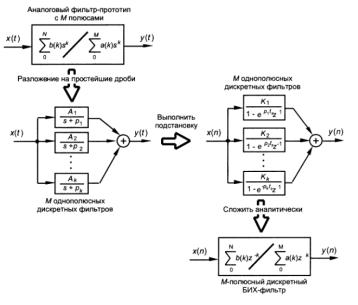
Сущность Метода 2 инвариантного преобразования импульсной характеристики сводится к разбиению аналогового фильтрапрототипа на несколько (M) однополюсных (1-го порядка) фильтров. Каждый из полученных однополюсных фильтров аппроксимируется БИХ-фильтром 1-го порядка, которые потом объединяются в БИХ-фильтр M-го порядка (рис. 4.16).
Преобразование по Методу 2.
Этап 1. Спроектировать (или выбрать) аналоговый фильтрпрототип. В результате получить передаточную функцию фильтра в виде
|
N |
|
|
bc (k)sk |
, N M . |
Hc (s) M |
||
|
k 0 |
|
|
ac (k)sk |
|
|
k 0 |
|
Этап2. Определитьчастоту (fs) ипериод(ts = 1/fs) дискретизации. Этап 3. Выразить передаточную функцию в виде суммы однополюсных передаточных функций. Для этого необходимо использовать разложение отношения полиномов на простейшие
дроби:
81
|
N |
|
|
|
|
|
bc (k)sk |
M |
Ak |
M |
|
Hc (s) M |
|
|
Hk (s), |
||
|
k 0 |
|
|
|
|
|
ac (k)s |
k |
|
(s p ) |
|
|
|
k 1 |
k k 1 |
||
|
|
|
|||
k 0
где Ak – константы, – pk – полюс соответствующей дроби, Hk(s) – однополюсная передаточная функция.
Рис. 4.16. Иллюстрация Метода 2
Этап 4. Для перехода в z-плоскость (от Hk(s) к Hk(z)) необходи-
мо заменить знаменатель (s + pk) на выражение |
Hk (z) |
|
|
Ak |
, |
|
1 |
e pk ts z 1 |
|||||
|
|
|
||||
которое представляет собой передаточную функцию однополюсного (1-го порядка) БИХ-фильтра. Просуммировав все Hk(z), получим передаточную функцию для БИХ-фильтра M-го порядка:
M |
M |
Ak |
|
|
H (z) Hk (z) |
|
|
. |
|
p t |
s z 1 ) |
|||
k 1 |
k 1 |
(1 e k |
|
|
82
Этап 5. Для вычисления коэффициентов фильтра необходимо преобразовать передаточную функцию к виду отношения полиномов. Для этого нужно привести простейшие дроби к общему знаменателю и получить результат в виде:
|
|
|
N |
|
|
H (z) |
Y (z) |
|
b(k)z k |
|
. |
k 0 |
|
||||
|
M |
|
|||
|
X (z) |
|
|
||
|
1 a(k)z |
k |
|||
|
|
|
k 1 |
|
|
Этап 6. Представить разностное уравнение БИХ-фильтра следующим образом:
y(n) [b(0)x(n) b(1)x(n 1) ... b(N )x(n N )]
N |
|
M |
a(1) y(n 1) ... a(M )x(n M ) ts b(k)x(n k) a(k) y(n k). |
||
k |
0 |
k 1 |
Обратите внимание, что при переходе от передаточной функции к разностному уравнению знаки коэффициентов a(k) меняются на противоположные.
Для масштабирования передаточной функции относительно частоты дискретизации нужно умножить ее на значение периода дискретизации:
|
|
|
N |
|
H (z) |
Y (z) |
|
ts b(k)z k |
. |
k 0 |
||||
|
M |
|||
|
X (z) |
|
||
|
1 a(k)z k |
|
||
|
|
|
k 1 |
|
Соответственно, разностное уравнение тоже должно иметь указанный коэффициент:
y(n) ts [b(0)x(n) b(1)x(n 1) ... b(N )x(n N )]
N |
|
M |
a(1) y(n 1) ... a(M )x(n M ) ts b(k)x(n k) a(k) y(n k). |
||
k |
0 |
k 1 |
Для улучшения частотных характеристик фильтра (например, увеличение крутизны АЧХ) необходимо увеличивать частоту дискретизации.
83

Метод проектирования БИХ-фильтров с помощью билинейного преобразования
Метод билинейного преобразования нашел широкое применение потому, что он:
устраняет необходимость в применении обратного преобразования Лапласа и z-преобразования,
отражает всю s-плоскость в z-плоскость, за счет чего полностью устраняяются явления наложения,
вносит нелинейные искажения частотной оси передаточной функции H(z), благодарячему увеличивается крутизна фронтовАЧХ.
Этап 1. Спроектировать (или выбрать) аналоговый фильтрпрототип. В результате получить передаточную функцию фильтра
ввиде
|
N |
|
|
|
bc (k)sk |
, N M . |
|
Hc (s) M |
0 |
||
|
k |
|
|
ac (k)sk
k 0
Этап2. Определитьчастоту (fs) ипериод(ts = 1/fs) дискретизации. Этап 3. Комплексную переменную s заменить следующим вы-
ражением:
s 2 1 z 1 . ts 1 z 1
ЗаписатьвыражениедляпередаточнойфункцииБИХ-фильтраH(z). Этап 4. Умножить числитель и знаменатель передаточной функции фильтра H(z) на (1 + z–1) и получить передаточную функ-
цию в традиционном виде:
|
|
|
N |
|
|
H (z) |
Y (z) |
|
b(k)z k |
|
. |
k 0 |
|
||||
|
M |
|
|||
|
X (z) |
|
|
||
|
1 a(k)z |
k |
|||
|
|
|
k 1 |
|
|
Этап 5. Записать разностное уравнение БИХ-фильтра:
84

y(n) [b(0)x(n) b(1)x(n 1) ... b(N )x(n N )]
N |
|
M |
a(1) y(n 1) ... a(M )x(n M ) ts b(k)x(n k) a(k) y(n k). |
||
k |
0 |
k 1 |
Оптимизационный метод проектирования БИХ-фильтров
Оптимизационный метод относится к численным методам вычисления. Они требуют, чтобы были заданы желаемые частотные характеристики фильтра: верхние и нижние частоты среза (f1 и f2), допустимые значения отклонений (δp и δs), частота дискретизации fs (рис. 4.17). После этого с использованием итерационных алгоритмов подбираются порядок и коэффициенты фильтра, которые обеспечат отличие частотной характеристики от требуемой не более заданной погрешности.
Рис. 4.17. Пример задания параметров при проектировании БИХ-фильтров оптимизационными методами
Рассмотрим некоторые особенности БИХ-фильтров, которые влияют на их применение. Вследствие определенной структуры (наличия обратных связей) БИХ-фильтры очень чувствительны к ошибкам, возникающим из-за округления или переполнения при сопутствующих математических операциях. При этом могут происходить значительные искажения частотных характеристик, а в некоторых случаях – потеря устойчивости, что приводит к нарушению работы фильтра.
85
Во избежание указанных негативных ситуаций можно увеличивать длину регистров, использовать более эффективные форматы представления данных (например, с плавающей точкой), применять различные виды структур БИХ-фильтров. Но наиболее эффективным способом решения данной проблемы является построение каскадных структур, позволяющих реализовать фильтр требуемого порядка за счет соединения нескольких фильтров более низкого порядка.
Обычно применяются последовательные каскадные структуры. Передаточная функция всего фильтра при этом представляет собой произведение передаточных функций составляющих его фильтров более низкого порядка. Часто разработчики останавливают свой выбор на последовательном включении фильтров 2-го порядка (их еще называют «биквадратными»). Очевидно, что существует большое количество комбинаций коэффициентов и мест включения фильтров, поэтому применяются различные подходы к построению оптимизированных (или близких к оптимальным) структур. Они базируются на представлении передаточной функции в виде отношения произведений полиномов с нулями (в числителе) и полюсами (в знаменателе), а затем на определенной перестановке множителей.
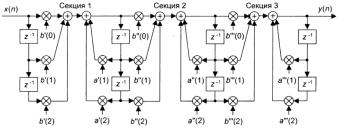
Пример построения фильтра 6-го порядка за счет каскадного включения трех биквадратных фильтров приведен на рис. 4.18.
Рис. 4.18. Пример построения фильтра 6-го порядка с каскадным включением биквадратных фильтров
ПриведемсравнительныйанализБИХ- иКИХ-фильтров(табл. 4.1).
86
|
|
Таблица 4 . 1 |
|
Сравнение характеристик КИХ- и БИХ-фильтров |
|||
|
|
|
|
Характеристика |
БИХ-фильтры |
КИХ-фильтры |
|
Количество умножений |
Наименьшее |
Наибольшее |
|
Чувствительность к |
Высокая (например, для |
Низкая |
|
аудиосистем высокого |
|||
квантованию |
(до 16 бит на один |
||
качества требуется 24 бита |
|||
коэффициентов |
на один коэффициент) |
коэффициент) |
|
|
|
||
Вероятность |
|
|
|
переполнений |
Высокая |
Очень низкая |
|
коэффициентов |
|
|
|
Устойчивость |
Должна быть обеспечена |
Гарантирована |
|
при проектировании |
|||
|
|
||
Линейность |
|
Гарантирована |
|
фазочастотной |
Невозможна |
(при симметричных |
|
характеристики |
|
коэффициентах) |
|
Возможность |
|
|
|
аппроксимации |
Есть |
Нет |
|
аналоговых фильтров |
|
|
|
Количество |
Наименьшее |
Наибольшее |
|
коэффициентов |
|||
|
|
||
Структура фильтра |
Средней сложности |
Очень простая |
|
Распространенность |
|
|
|
программ |
Широкая |
Очень широкая |
|
проектирования |
|
|
|
Сложность алгоритма |
Высокая |
Низкая |
|
проектирования |
|||
|
|
||
Поддержка адаптивной |
Есть |
Есть |
|
фильтрации |
|||
|
|
||
Контрольные вопросы и задания
1.Привести и обосновать достоинства и недостатки КИХфильтров.
2.Описать свойства импульсной характеристики КИХ-фильтра.
3.ОписатьсоотношениясверткиприменительнокКИХ-фильтрам.
4.Пояснить структуру КИХ-фильтра.
5.Практическое задание. Рассчитать параметры КИХ-фильтров (ФНЧ, ПФ, ФВЧ) для исходных данных: N = 32 ДПФ, частота дискретизации fs = 32 кГц, номер по порядку № (1...5).
87
ФНЧ – частота среза fср = (№ + 1) fs / N.
ПФ – ширина полосы пропускания B = 2(№ + 1) fs / N, цен-
тральная частота fc = fs / 4.
ФВЧ – частота среза fср = (N/2 – (№ + 1)) fs / N. Построить АЧХ и ФЧХ спроектированных фильтров.
6.ПривестииобосноватьдостоинстваинедостаткиБИХ-фильтров.
7.Пояснить понятие устойчивости применительно к БИХфильтрам.
8.Практическое задание. Дан БИХ-фильтр второго порядка
(M = 2, N = 2).
№ п/п |
Коэффициенты b(k) |
Коэффициенты a(k) |
|||
|
b(0) |
b(1) |
b(2) |
a(1) |
a(2) |
1 |
0.0704 |
0.1408 |
0.0704 |
–1.1997 |
0.5157 |
2 |
0.2180 |
0.4360 |
0.2180 |
–0.3514 |
0.3297 |
3 |
0.4047 |
0.8094 |
0.4047 |
0.4734 |
0.3430 |
4 |
0.2180 |
0.4360 |
0.2180 |
–0.3514 |
0.3297 |
5 |
0.3070 |
0.6141 |
0.3070 |
0.0641 |
0.3140 |
Определить и построить АЧХ и ФЧХ.
9.Практическое задание. Показать, что структуры фильтров, рассмотренные на рис. 4.14, эквивалентны и описываются одним разностным уравнением.
10.Практическое задание. Спроектировать БИХ-фильтр методами инвариантногопреобразованияимпульснойхарактеристики(методом2)
ибилинейного преобразования для заданного аналогового фильтра-
прототипа: частота дискретизации fs, уровень среза Rp, частота среза по уровнюRp fср, типфильтра, порядокфильтраравен2.
№ п/п |
fs, Гц |
fср, Гц |
Rp, дБ |
Тип фильтра |
1 |
100 |
30 |
1 |
Чебышева I типа |
2 |
100 |
30 |
0.7071 |
Баттерворта |
3 |
200 |
50 |
1 |
Чебышева I типа |
4 |
200 |
50 |
0.7071 |
Баттерворта |
5 |
200 |
70 |
1 |
Чебышева I типа |
По типу фильтра необходимо определить его передаточную функцию. Для этого можно использовать функции Matlab или Scilab.
88
5. ПРЕОБРАЗОВАНИЕ ЧАСТОТЫ ДИСКРЕТИЗАЦИИ
Процедура преобразования частоты дискретизации проводится над уже оцифрованным сигналом. Это позволяет уменьшить объем вычислений и, соответственно, сложность фильтров.
Преобразование частоты дискретизации может быть как понижающим, так и повышающим. Понижение частоты дискретизации
внекоторое целое число раз называется прореживанием (в англоязычной литературе изначально использовался термин «децимация», т.е. уменьшение в десять раз). Повышение частоты дискретизации
внекоторое целое число раз называется интерполяцией.
5.1. Понижение частоты дискретизации (прореживание)
Прореживание в D раз как наиболее простой процесс преобразования частоты дискретизации предусматривает оставление во входной последовательности данных отчетов с шагом D (индексы 0, D, 2D, 3D и т.д.) и удаление всех промежуточных. Таким образом, новая частота дискретизации fnew уменьшилась в D раз относительно старой частоты fold и стала fnew = fold / D (рис. 5.1).
а
b
Рис. 5.1. Иллюстрация прореживания (D = 3)
В частотной области в результате прореживания в целое количество раз D появляются дополнительные копии на частотах, кратных частоте fnew (рис. 5.2).
89
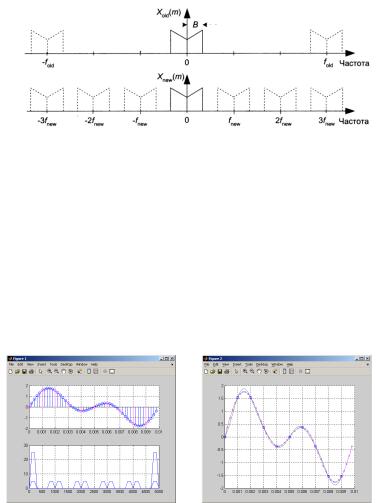
а
b
Рис. 5.2. Спектры исходного и прореженного сигналов
Очевидно, что во избежание явления наложения копий спектров соотношение fnew > 2B должно обязательно выполняться.
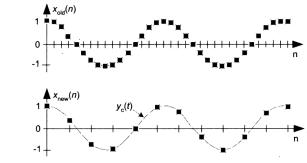
Пример 5.1. Рассмотрим следующие исходные данные:
x(t) = sin(2 100t) + + sin(2 200t); fold = 5 кГц; D = 5. На рис. 5.3,а
показан сигналы, дискретизированные с частотами дискретизации fold и fnew = fold/D, и спектры при обоих параметрах дискретизации. На рис. 5.3,б показаны восстановленные сигналы, дискретизированные с разными частотами. На нем видно, что качество восстановления достаточное и при уменьшении частоты дискретизации в 5 раз.
а |
б |
Рис. 5.3. Иллюстрация к прореживанию
При большом значении коэффициента прореживания D (на практике больше 10) эффективнее организовать преобразование в несколько ступеней. Например, при наличии двух ступеней преобразования общий коэффициент D представляется как произведение: D = D1·D2. Таким образом, сначала проводится прореживание
90