

книги / Несущая способность конструкций в условиях теплосмен
..pdfгде δ – удлинение стержня, L – его длина. Для удобства и упрощения дальнейших выкладок индексы «ξ» у компонент вектора перемещения, тензоров напряжения и деформации опускаются: u, σ и ε.
На рис. 12.1 представлена конструкция, сформированная из стержневых элементов, закрепленных между собой в узлахшарнирах.
Q Q Q Q
Рис. 12.1. Стержневая конструкция
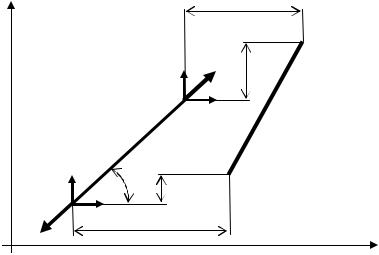
Рассматривается произвольно расположенный элемент (рис. 12.2) стержневой конструкции, изображенной на рис. 12.1. Узлы выбранного стержня имеют номера i и j, координаты узлов –
{xi , yi } , {xj , yj } . Стержень растянут внешними усилиями Pi и Pj.
Из равновесия выделенного стержня следует, что модули усилий равны, то есть Pi = Pj = P .
Первоначально рассматривается геометрическое (кинематическое) состояние выделенного стержневого элемента. Его длина в первоначальном положении определяется координатами узлов:
L = (xj − xi )2 + (y j − yi )2 . |
|
Удобно полученное выражение представить в форме |
|
L2 = (xj − xi )2 + (yj − yi )2 . |
(12.2) |
|
191 |
В результате нагружения конструкции рассматриваемый стержень переместился в новое положение, определяемое индекса-
ми «i'» и «j'».
Координаты узлов в новом положении определяются выражениями
xi′ = xi + xi , x′j = x j + x j ;
yi′ = yi + yi , |
y′j = y j + y j . |
y |
xj |
|
|
|
j' |
Pyj |
Pj yj |
|
|
j |
Pxj |
Pyi |
i' |
|
αyi
i
Pxi
xi
Pi
x
Рис. 12.2. Расчетная схема метода стержневых элементов
Дифференциал выражения (12.2) записывается в видеуравнения
2LdL = 2(xj − xi )dxj − 2(xj − xi )dxi + 2(yj − yi )dyj − 2(yj − yi )dyi ,
которое преобразуется к форме |
|
|
|
|
|
|
|
|||||
dL = |
xj − xi |
dx |
|
− |
xj − xi |
dx + |
yj − yi |
dy |
|
− |
y j − yi |
dy . |
|
j |
|
|
j |
|
|||||||
|
L |
|
L |
i |
L |
|
L |
i |
||||
|
|
|
|
|
|
|
||||||
Далее, учитывая, что |
|
|
|
|
|
|
|
|||||
|
xj − xi |
= cosα, |
yj − yi |
= sin α, |
|
L |
L |
||
|
|
|
||
192 |
|
|
|
|

предыдущее выражение можно представить в виде
dL = cosα dxj − cosα dxi + sin α dyj − sin α dyi .
В соответствии с геометрической схемой, приведенной на рис. 12.2, можно перейти от дифференциалов d к конечным прира-
щениям |
, то есть заменить в полученном выражении dxi и dxj на xi |
||||||
и xj, dyi и dyj – на yi и yj, dL – на L: |
|
|
|
||||
|
L = cosα |
xj − cosα xi + sin α y j |
− sin α |
yi . |
|||
Поскольку L по физическому смыслу является удлинением |
|||||||
стержня, xi, xj, yi |
и yj – перемещениями узлов стержня, принято |
||||||
использовать обозначения |
|
|
|
|
|
||
|
L = δ, |
xi = ui , |
x j = u j , yi = vi , |
|
y j = v j . |
||
В итоге получается выражение, связывающее удлинение δ |
|||||||
стержня с перемещениями ui, uj, vi и vj его узлов: |
|
|
|||||
|
δ = cosα u j − cosα ui |
+ sin α vj − sin α vi . |
(12.3) |
||||
Удобно формулу (12.3) представить в матричном виде: |
|||||||
|
|
|
δ = A {u} , |
|
|
(12.4) |
|
где |
A = − cos α |
− sin α |
cos α |
sin α |
– |
матрица-строка; |
|
uiv
{u} = ui – матрица-столбец узловых перемещений.
jvj
Далее рассматривается статическое равновесие выделенного стрежневого элемента. Проекции на координатные оси x и y усилий Pi и Pj, растягивающих стержневой элемент (см. рис. 12.2), определяются соотношениями
Pxi = − P cos α, Pyi = −Psin α ,
193

Pxj = P cosα, Pyj = Psin α,
которые удобно также представить в матричном виде:
|
|
|
|
{P} = A T P, |
(12.5) |
|
|
|
− cosα |
Pxi |
|
||
|
|
|
|
|
|
|
где A |
T |
|
− sin α |
Pyi |
– |
|
|
= |
|
– матрица-столбец коэффициентов; {P} = |
|
||
|
|
cosα |
Pxj |
|
||
|
|
|
|
P |
|
|
|
|
|
sin α |
|
yj |
|
матрица-столбец узловых нагрузок.
Растягивающее усилие P связано с напряжением σ, удлинением δ и деформацией ε стержня и зависит от модуля упругости E материала, площади F поперечного сечения и длины стержня:
P = Fσ= FEε = |
FE |
δ. |
(12.6) |
|
L |
|
|
Подстановка выражений (12.4) и (12.6) в формулу (12.5) приводит к соотношению
|
{P} = A T P = |
A T FE |
δ= |
FE |
A T A {u} = [B]{u}, |
(12.7) |
||||||
где |
|
|
|
L |
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[B] = FE |
A T |
A = |
|
|
|
|
||
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
cos2 α |
cosα sin α |
− cos2 α |
− cos α sin α |
||||||
|
|
|
cosα sin α |
sin |
2 |
α |
− cosα sin α |
− sin |
2 |
α |
|
|
= |
FE |
|
|
|
||||||||
L |
|
− cos2 α |
− cosα sin α |
cos2 α |
cosα sin α |
|||||||
|
|
|
− cosα sin α |
− sin2 α |
|
cos α sin α |
sin2 α |
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
– квадратная матрица жесткости стержневого элемента. Согласно построению, матрица жесткости является симметричной, при этом суммы элементов в каждой строке и в каждом столбце матрицы равны нулю.
194

Теперь формула (12.7) может быть записана в виде
|
|
cos2 α |
cosα sin α |
− cos2 α |
− cosα sin α |
|
|||||
|
|
cosα sin α |
sin |
2 |
α |
− cosα sin α |
− sin |
2 |
α |
|
× |
FE |
|
|
|
||||||||
L |
|
− cos2 α |
− cos α sin α |
cos2 α |
cosα sin α |
|
|||||
|
|
− cosα sin α |
− sin2 α |
cosα sin α |
sin2 α |
|
|
||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ui |
Pxi |
|||
v |
|
P |
|
|
i |
|
yi |
||
× |
|
= |
|
. |
u j |
Pxj |
|||
v |
|
P |
|
|
|
j |
|
yj |
|
Система четырех линейных алгебраических уравнений (12.7), связывающая узловые перемещения ui, vi, uj, vj и узловые нагрузки Pxi, Pyi, Pxj, Pyj, построена для одного стержневого элемента. Если конструкция содержит N стержневых элементов, можно получить систему 4N аналогичных линейных алгебраических уравнений. Добавив к ней условия совместного деформирования стержней и закрепления конструкции, а также внешние нагрузки, можно решить задачу по определению узловых перемещений u1, v1, …, un, vn и узловых нагрузок Px1, Py1, …, Pxn, Pyn, где n – число узлов стержневой конструкции. Далее, используя выражение (12.3), можно определить удлинение δ каждого стержня, вычислить его деформацию ε по формуле (12.1) и напряжение σ согласно закону Гука (6.2).
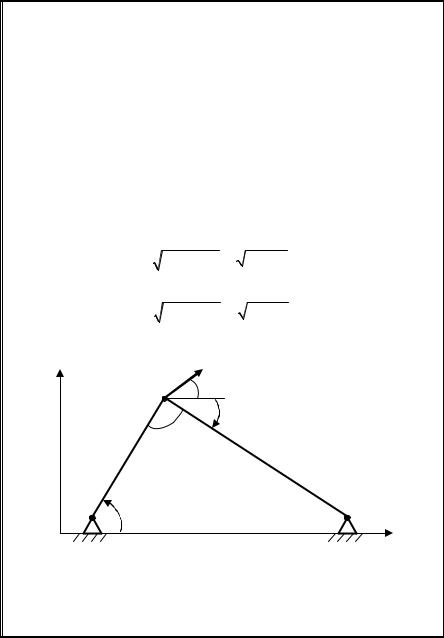
Пример. На рис. 12.3 приведена конструкция, состоящая из двух балочных элементов и находящаяся в равновесии под действием силы Q, модуль которой равен 10 кН. Длины стержней известны: LAB = 3 м, LBC = 4 м. Площади поперечных сечений стержней заданы: FAB = FBC = 0,01 м2. Опоры А и С закреплены неподвижно. Требуется определить величины перемещений uВ и vВ узла В стержневой конструкции, значения удлинения стержней δАВ и δВС, деформации εAB и εBC тех же стержней, напряжения σAB и σBC в них, реакции связей RxA и RyA, PxB и PyB, RxC и RyC в узлах А, В и С. Модули упругости материала стержней одинаковы – E = 2 105 МПа.
195
1. Моделирование расчетной области.
Принимается, что балочные элементы конструкции моделируются прямолинейными однородными упругими стержневыми элементами АВ и ВС постоянного поперечного сечения (см. рис. 12.3), соединенными шарниром В и прикрепленными к неподвижному основанию шарнирами А и С. Угол αBC (см. рис. 12.3), отсчитываемый в направлении «против хода часовой стрелки», положителен. Поскольку треугольник ABC прямоугольный, можно определить величину угла и соответствующиезначения тригонометрических функций:
αAB = arctg |
|
LBC |
|
= arctg |
4 |
= 0,927 295 рад; |
|||||||||||
|
LAB |
|
3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
sin αAB = |
|
|
|
LBC |
|
= |
|
|
4 |
= |
4 |
= 0,8; |
|||||
|
L2AB |
|
|
|
|
|
32 |
+ 42 |
5 |
||||||||
|
|
+ L2BC |
|
|
|
|
|
||||||||||
cos αAB = |
|
|
LAB |
|
|
= |
|
|
|
3 |
|
= |
3 |
= 0,6. |
|||
|
L2AB |
+ |
|
|
|
32 |
+ 42 |
|
5 |
||||||||
|
|
|
L2BC |
|
|
|
|
|
|||||||||
y |
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
45° |
|
|
|
|
|
|
|
|
|
|
|||
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
αBC |
|
|
|
|
|
|
|
|
||
|
|
|
90° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
αAB |
C x |
|
Рис. 12.3. Расчетная схема стержневой конструкции
Угол αBC отрицателен, поскольку отсчитывается в направлении «по ходу часовой стрелки»:
196

|
αBC = −arctg |
LAB = −arctg |
3 = −0,643 501 рад; |
|||||||
|
|
LBC |
|
4 |
|
|
|
|
|
|
|
sin αBС = − |
LAB |
= − |
|
3 |
= − |
3 |
= −0,6; |
||
|
|
32 |
+ |
5 |
||||||
|
L2AB + L2BC |
42 |
|
|
||||||
|
cos αBС = |
LBC |
= |
|
4 |
= |
4 |
|
= |
0,8. |
|
L2AB + |
32 |
+ |
5 |
|
|||||
|
|
L2BC |
42 |
|
|
|
||||
2. Формирование системы разрешающих соотношений для |
||||||||||
произвольного стержневого элемента. |
|
|
|
|
|
|
||||
Стержневая конструкция (см. рис. 12.3) расчленяется на от- |
||||||||||
дельные стержневые элементы (рис. 12.4, а и б), при этом действие |
||||||||||
отделяемых частей заменяется реакциями связей: |
PxB и Px′B , PyB и |
|||||||||
Py′B в шарнире В; RxA и RyA на опоре А; |
RxC и RyC |
на опоре С. |
||||||||
|
P'yB |
PyB |
|
|
|
|
|
|
|
Q |
y |
|
|
|
|
P'xB PxB |
|||||
|
B |
|
|
|
|
|
||||
|
B |
PxB |
|
|
|
|
|
|
|
|
|
P'xB |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
в |
PyB |
|
|
|
|
|
|
|
|
|
P'yB |
||
|
|
|
|
|
|
|
|
|
|
|
RyA |
|
|
|
|
|
|
|
|
|
RyC |
|
αAB |
|
|
|
|
|
αBC |
C RxC |
||
A RxA |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
x |
|
а |
|
|
|
|
|
|
|
б |
|
|
Рис. 12.4. Отдельные элементы стержневой конструкции: |
|||||||||
|
а – стержень АВ; б – стержень ВС; в – шарнир В |
|||||||||
|
с действующими на него нагрузками |
|||||||||
Формируется матрица жесткости для стержневого элемен- |
||||||||||
та АВ (см. рис. 12.4, а): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
197 |
|
|
|
cos2 αAB |
|
|
|
|
|
cos αAB sin αAB |
|
− cos2 αAB |
|
|
− cos αAB sin αAB |
|
|
||||||||||
|
F E |
|
cosα |
AB |
sin α |
AB |
|
|
|
sin |
2 α |
AB |
|
− cos α |
AB |
sin α |
AB |
|
− sin2 α |
AB |
|
|
||||
[BAB ] = |
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
||||||||
LAB |
|
− cos2 αAB |
|
|
|
|
− cos αAB sin αAB |
|
cos2 αAB |
|
|
|
cosαAB sin αAB |
|
||||||||||||
|
|
|
− cos αAB sin αAB |
|
|
− sin2 αAB |
|
cos αAB sin αAB |
|
|
sin2 αAB |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,36 |
|
|
0,48 |
|
−0,36 |
−0,48 |
|
|
|
|
|||||
|
|
|
= 0,01 2 |
|
|
11 |
|
0,48 |
|
|
0,64 |
|
−0,48 |
|
|
|
|
= |
|
|
|
|||||
|
|
|
10 |
|
|
|
|
|
−0,64 |
|
|
|
||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
−0,36 |
|
−0,48 |
0,36 |
0,48 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
−0,48 |
|
−0,64 |
0,48 |
0,64 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
0,36 |
|
0,48 |
−0,36 −0,48 |
|
|
|
|
|
|||||||||
|
|
|
|
= |
2 |
10 |
9 |
|
|
0,48 |
|
0,64 |
−0,48 −0,64 |
|
|
|
|
|
||||||||
|
|
|
|
3 |
|
|
−0,36 |
−0,48 |
|
0,36 |
|
0,48 |
. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
−0,64 |
|
0,48 |
|
0,64 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
−0,48 |
|
|
|
|
|
|
|
|
|||||||||
Это позволяет сформировать систему линейных алгебраических уравнений (12.7) для первого стержневого элемента:
|
|
|
|
|
|
0,36 |
|
0,48 |
−0,36 |
|
−0,48 |
uA |
|
RxA |
|
|
|
|
|
|
||||||||||||||
|
2 |
|
|
|
|
|
0,48 |
|
0,64 |
−0,48 |
|
−0,64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
10 |
9 |
|
|
|
|
vA |
|
RyA |
|
|
(12.8) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
P′ |
. |
|
|
|||||||||||
|
3 |
|
|
|
|
|
−0,36 |
|
−0,48 |
0,36 |
|
|
0,48 |
|
|
uB |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
xB |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P′ |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
−0,48 |
|
−0,64 |
0,48 |
|
|
0,64 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
vB |
|
|
|
yB |
|
|
|
|
|
|
|||||||||||||||
Аналогичным образом формируется матрица жесткости для |
||||||||||||||||||||||||||||||||||
стержневого элемента ВС (см. рис. 12.4, б): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
cos2 αBС |
cosαBС sin αBС |
|
− cos2 αBС |
|
|
− cosαBС sin αBС |
|
|
|||||||||||||||||||
|
F |
|
E |
|
cosα |
BС |
sin α |
BС |
sin2 α |
BС |
|
|
− cosα |
BС |
sin α |
BС |
|
− sin |
2 α |
BС |
|
|
|
|||||||||||
[BBС ] = |
BС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
||||||||
L |
|
|
|
|
|
− cos |
2 α |
BС |
− cosα |
BС |
sin α |
BС |
|
cos2 α |
BС |
|
|
cosα |
BС |
sin α |
BС |
|
||||||||||||
|
BС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
− cosαBС sin αBС |
− sin2 αBС |
|
|
cosαBС sin αBС |
|
|
sin2 αBС |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
198

