

1505
.pdfVE = pe V , |
VS2 |
= ps2 V . |
||||
Угловая скорость звеньев AB, CB (1/с): |
|
|
||||
ω = |
VBA |
, |
ω |
= |
VCB |
. |
AB |
lAB |
BC |
lCB |
|||
|
|
|
||||
Построение планов ускорений |
||||||
1. Ускорение точки А: aA = ω 1 lOA , м/с. |
|
|
||||
n |
2 |
|
|
|
|
|
Вектор аА направлен по звену ОА к центру вращения – точке О. На чертеже выбираем точку p2 – полюс. ap = aC = 0 . Из точки p2 прово-
дим вектор pa, изображающий аА. Строим план ускорений, p1а – отрезок, изображающий в масштабе ускорение точки А.
Масштаб плана ускорений ((м/с2) /мм):
µa = aA . p2a
2. Ускорение точки В определяется из решения графически двух векторных уравнений:
|
|
|
|
|
B = |
|
|
A + |
|
|
BAn |
+ |
|
|
ABτ , |
|
|
|
|
|
(5.3) |
||||||
|
a |
a |
a |
a |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
= |
|
|
+ |
|
n |
+ |
|
τ . |
|
|
|
|
|
|
||||||||
|
a |
B |
a |
a |
a |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
C |
|
|
BC |
|
|
|
BC |
|
|
|
|
|
|
|||||||
где aBAn |
= ω 2ABlAB , м/с2 – нормальное ускорение точки В относительно точки |
||||||||||||||||||||||||||
А, направленное вдоль АВ от В к А; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
aBAτ |
– тангенциальное ускорение точки В относительно А, направлен- |
||||||||||||||||||||||||||
ное перпендикулярно АВ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
aBCn |
= ω 2BC lBC , м/c2 – нормальное ускорение точки В относительно точ- |
||||||||||||||||||||||||||
ки С, направленное вдоль ВС от В к С; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
aBCτ |
– тангенциальное ускорение точки В относительно С, направлен- |
||||||||||||||||||||||||||
ное перпендикулярно ВС; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
an |
соответствует отрезок an1 плана, длина которого an = |
aBAn |
, мм; |
||||||||||||||||||||||||
µa |
|||||||||||||||||||||||||||
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
an |
соответствует отрезок p2n1 плана, длина которого an |
2 |
= |
aBCn |
, мм. |
||||||||||||||||||||||
|
|||||||||||||||||||||||||||
BС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µa |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
191

С учетом системы (5.3), значений an1, pn2 и их направлений достраиваем план ускорений. Соединив полученную точку В с полюсом p, получим вектор pb, соответствующий aC:
aB = ( p2b) a ,
aBAτ = (bn1 )µa ,
aBCτ = (bn2 )µa .
3. Ускорение точки Е, принадлежащей звену 2, определяем из подобия:
AB = ab ae = ab AE , AE ae AB
aE = ( pe) a , aS 2 = ( ps2 ) a , aS 3 = ( ps3 ) a ,
Угловые ускорения ε3:
|
|
|
a |
τ |
a |
τ |
||
ε |
|
= |
|
BA |
, ε 3 = |
|
BC |
. |
BA |
|
|
|
|
||||
|
|
|
lAB |
lBC |
||||
5.9.4. Кинетостатический расчет механизма
Определение сил инерции и моментов сил инерции звеньев механизма
Масса звеньев
Массу звеньев определим по формуле
M = ql,
где q – погонная масса материала (q = 10 кг/м); l – длина звена. Масса кривошипа ОА (кг): m1 = qlOA .
Масса шатуна ЕВ (кг): m2 = qlEB . Масса коромысла СВ (кг): m3 = qlCB . Сила тяжести звеньев (Н):
–вес кривошипа ОА: G1 = m1g ,
–вес шатуна ЕА: G2 = m2 g ,
–вес коромысла СВ: G3 = m3 g .
192
Моменты инерции звеньев
Момент инерции масс звеньев-стержней относительно проходящей через центр масс S перпендикулярно плоскости движения определяем по приближенной формуле
JS = 0,1ml2.
Момент инерции масс кривошипа ОА – JS1, кгм2. Момент инерции шатуна ЕА: JS2, кгм2.
Момент инерции коромысла СВ: JS3, кгм2. Определение сил инерции звеньев (Н): Сила инерции кривошипа АВ: Fu1 = −m1 as1 .
Сила инерции шатуна ЕА: Fu 2 = −m2 as 2 . Сила инерции коромысла ВС: Fu 3 = −m3 as 3 .
Направление моментов инерции сил (Нм) противоположно направлению угловых ускорений ε.
M u1 = −J s1 ε 1 .
M u 2 |
|
= |
|
|
|
−J s 2 ε AB |
|
. |
|||
|
|
|
|
||||||||
M u3 |
|
|
= |
|
−J s 3 ε CB |
|
. |
||||
|
|
|
|
||||||||
Определение реакций в кинематических парах структурной группы 212
Неизвестную силу R12 раскладываем на две составляющие:
R12 = R12n + R12τ .
Эта сила проходит через центр шарнира А.
Порядок определения реакций в кинематических парах структурной группы 212 представлен в табл. 5.4.
|
|
|
|
|
|
|
|
|
Таблица 5.4 |
|
|
|
|
|
|
Порядок силового расчета группы 22 |
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
Искомые |
|
|
|
Уравнения |
Равновесие звена |
|
||
|
|
реакции |
|
|
|
равновесия |
или структурной группы |
|
||
|
|
12τ |
|
|
|
|
Звено 2 |
|
||
R |
|
|
|
|
|
|||||
|
|
43τ |
|
∑M |
B = 0 |
Звено 3 |
|
|||
|
R |
|
||||||||
|
|
12τ и |
|
43τ |
|
∑F |
= 0 |
Структурная группа 2–3 |
|
|
|
R |
|
|
|||||||
|
R |
|
||||||||
|
|
32 |
|
∑F |
= 0 |
Звено 2 |
|
|||
R |
|
|
||||||||
193
1. Сумма моментов всех сил, действующих на звено 2 относительно точки В:
∑ M B = 0 ,
−R12τ AB µl + Fu 2 µl hu 2 − G2 hG 2 µl − M и2 = 0;
|
Rτ = |
Fu 2 hF l − G2 hG 2 l − M и2 |
. |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB µl |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
2. Сумма моментов всех сил, действующих на звено 3 относительно |
|||||||||||||||||||||||||||||||||||||||||||||
точки В: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑M B = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
−R43τ AB µl + pu′3 hu3 µl − G3 hG 3 µl + M и3 = 0, |
|||||||||||||||||||||||||||||||||||||||||||||
|
Rτ = |
|
Fи3 hu 3 l − G3 hG 3 l + M и2 |
. |
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BC µl |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
3. Общее уравнение равновесия всей структурной группы: |
|||||||||||||||||||||||||||||||||||||||||||||
∑ F |
= |
|
12n + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43n = 0. |
|||||||
R |
R |
12τ + Fu 2 + G |
2 + Fu 3 + G |
3 + |
R43τ + |
R |
|||||||||||||||||||||||||||||||||||||||
Из произвольной точки а в масштабе F |
|
|
(Н/мм) откладываем после- |
||||||||||||||||||||||||||||||||||||||||||
довательно все известные силы, |
перенося |
|
их |
параллельно им самим |
|||||||||||||||||||||||||||||||||||||||||
в плане сил. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Модули реакций |
|
τ и |
|
|
|
|
|
|
|
τ определяются из плана сил: |
|||||||||||||||||||||||||||||||||||
R |
R |
||||||||||||||||||||||||||||||||||||||||||||
12 |
|
|
|
43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
Rn |
= |
|
|
|
|
|
|
|
n |
|
µ |
, |
|
R = |
|
|
|
|
|
|
|
|
|
|
|
µ , |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
R |
|
R |
|||||||||||||||||||||||||||||||||||||||
12 |
|
|
|
|
12 |
|
F |
|
12 |
|
|
12 |
|
|
|
|
F |
||||||||||||||||||||||||||||
|
|
|
|
Rn |
|
|
= |
|
n |
|
µ |
, |
|
R = |
|
|
|
|
|
µ . |
|||||||||||||||||||||||||
|
|
|
|
|
R |
|
|
|
R |
|
|||||||||||||||||||||||||||||||||||
43 |
|
|
43 |
|
F |
|
43 |
|
|
|
|
|
|
|
|
43 |
|
|
|
|
F |
||||||||||||||||||||||||
4. Из уравнения равновесия звена 3 находим R32 :
∑ F = R12n + Fu 2 + G2 + R32 = 0.
Строим план сил, откуда находим R32 (Н): R32 = R32 µF .
Силовой расчет ведущего звена
Прикладываем к звену 1 в точке А силу R21 = – R12 , а также пока еще не известную уравновешивающую силу Py , направив ее предварительно в произвольную сторону перпендикулярно кривошипу АВ. Так как
194

ω 1= const , то M u1 = 0 . Вначале из уравнения моментов всех сил относительно точки А определяем Py .
−Fy OA µl + G1 hG1 µl + R21 hR 21 µl = 0,
откуда
F = G1 hG1 l + R21 hR 21 l . |
|
y |
OA µl |
|
|
Реакцию R41 определим, построив силовой многоугольник, решая векторное уравнение равновесия звена 1:
R41n + G1 + Fy + R21 = 0.
Построение плана сил. Из произвольной точки а в масштабе F (Н/мм), откладываем последовательно все известные силы R21 , G1 , перенося их параллельно векторам в плане сил:
R21 (мм), G (мм), Fy (мм).
Измеряя на плане сил вектор, получаем
R41 = R41 µF =39 0, 4 =15,6.
Определение уравновешивающего момента с помощью рычага Жуковского
Строим в произвольном масштабе повернутый против часовой стрелки на 90° план скоростей. В одноименные точки плана переносим вне внешние силы (без учета масштаба), действующие на звенья механизма. Составляем уравнения моментов сил относительно полюса р плана скоростей, учитывая плечи сил.
Уравнения равновесия рычага Жуковского имеют следующий вид:
n |
|
∑M F = 0 или Fu 3 hFu 3 + Fu 2 hFu 2 + G2 hG 2 + G3 hG 3 + G1 hG1 − Fy pa = 0. |
|
i=1 |
|
F = Fu 3 hFи3 + Fu 2 hFu 2 + G2 hG 2 + G3 hG 3 + G1 hG1 . |
|
y |
pa |
|
|
Расхождение результатов определения уравновешивающей силы методом Жуковского и методом планов сил равно ∆ , % .
195
5.9.5. Определение кинетической энергии
Звено 1 совершает только вращательное движение вокруг неподвижной оси через шарнир О с угловой скоростью ω 1 .
Момент инерции (кгм2) звена 1 относительно шарнира О таков:
JO1 = J S1 + m1lOS2 1 .
Кинетическая энергия (Дж) определяется по формуле
T1 = JO1 ω 2 .
2
Звено 2 совершает сложное движение: поступательное со скоростью VS2 и вращательное относительно подвижной оси, проходящей через шарнир А с угловой скоростью ω 2 . В этом случае кинетическая энергия
(Дж) определяется по формуле:
|
m ·V 2 |
J |
S 2 |
·ω |
2 |
|
|
T = |
2 S 2 |
+ |
|
|
2 |
. |
|
|
|
|
|
|
|||
2 |
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|||
Звено 3 совершает только вращательное движение вокруг неподвижной оси через шарнир С с угловой скоростью ω 3 . Момент инерции (кгм2)
звена 3 относительно шарнира С:
JO 3 = J S1 + m3lOS2 3 .
Кинетическая энергия (Дж) определяется по формуле
T3 = JO 3 ·ω 32 .
2
Кинетическая энергия (Дж) всего механизма в заданном положении:
T= T1 + T2 + T3.
5.9.6.Определение приведенной массы
Найдем приведенную массу из выражения
T=mП·V2/2,
откуда mП = 2T , кг.
VA2
196
5.9.7. Определение мгновенной мощности сил трения
Для вращательных пар О, А, В, С момент сил трения (Нм) определяется по формуле
MTP = f R (d/2),
где f – коэффициент трения (f = 0,1);
d – диаметр шипов в парах (d = 20 мм); R – сила реакции в шарнире.
Шарнир О: M O |
= fR |
|
d |
. |
||||
|
|
|
|
|
||||
ТР |
41 2 |
|
|
|||||
Шарнир А: M A |
= fR |
d |
. |
|||||
2 |
||||||||
ТР |
12 |
|
|
|
|
|||
Шарнир В: M B |
= fR |
d |
. |
|||||
|
|
|||||||
ТР |
23 |
2 |
|
|
|
|
||
Шарнир С: M C |
= fR |
|
d |
. |
||||
|
|
|||||||
ТР |
34 |
2 |
|
|
|
|||
Расход мощности на трение в каждой вращательной паре определяется по формуле
WTP = MTP ω,
где ω – относительные угловые скорости звеньев.
Определим относительные угловые скорости для каждой вращательной пары:
ω 4−1= ω |
|
1 – относительнаяскоростьзвена1 относительностойки4; |
||||||||
ω 1−2= ω |
|
−1 ω |
2 |
|
|
– относительная скорость звена 1 относительно звена 2; |
||||
|
|
|||||||||
ω 3−1= ω |
|
|
−2 ω |
3 |
|
|
– относительнаяскоростьзвена2 относительнозвена3; |
|||
|
|
|
|
|||||||
ω 4−3= ω |
|
3 – относительнаяскоростьзвена3 относительностойки4. |
||||||||
Расход мощности на трение в шарнире О (Дж): |
||||||||||
|
|
|
|
|
|
|
W O |
= M O ω |
4−1 |
. |
|
|
|
|
|
|
|
TP |
TP |
|
|
Расход мощности на трение в шарнире А (Дж): |
||||||||||
|
|
|
|
|
|
|
W A |
= M A ω |
1−2 |
. |
|
|
|
|
|
|
|
TP |
TP |
|
|
Расход мощности на трение в шарнире В (Дж): |
||||||||||
|
|
|
|
|
|
|
W B |
= M B ω |
2−3 |
. |
|
|
|
|
|
|
|
TP |
TP |
|
|
Расход мощности на трение в шарнире С (Дж): |
||||||||||
|
|
|
|
|
|
|
W C |
= M C ω |
4−3 |
. |
|
|
|
|
|
|
|
TP |
TP |
|
|
197
5.10. Примеры динамического анализа механизмов
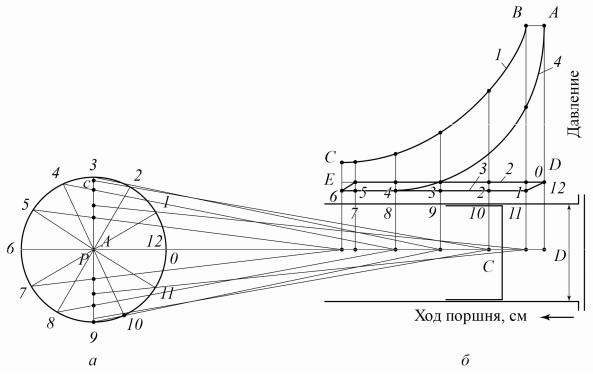
На рис. 5.8, а изображена схема одноцилиндрового четырехтактного двигателя Дизеля, а на рис. 5.8, б приведена его индикаторная диаграмма, которая снимается при помощи прибора, носящего название индикатора. В таком приборе имеется бумажная лента, которая может копировать движение поршня в цилиндре. Во время движения ленты на ней вычерчивается кривая при помощи пера, находящегося под действием давления газов в цилиндре.
Рис. 5.8. Механизм двигателя Дизеля: а – схема; б – индикаторная диаграмма
Разберем вычерченную индикатором диаграмму рис. 5.8, а. Ее можно разделить на четыре части, соответствующие четырем так называемым тактам работы двигателя. Первый такт начинается в крайнем правом положении поршня, соответствующем точке А на диаграмме. В момент, когда поршень занимает это положение, в среду сжатого воздуха, находящегося в правой части цилиндра, подается в распыленном виде нефть. Поскольку воздух вследствие сильного сжатия нагрет до нескольких сотен градусов, то нефть воспламеняется, температура газовой смеси повышается и смесь, увеличиваясь в объеме, давит па поршень, который, движется влево. Несмотря на происходящее при этом увеличение объема, давление в цилиндре остается приблизительно постоянным, ибо продолжа-
198

ется сгорание непрерывно поступающей в цилиндр нефти. Давление остается постоянным до положения поршня, соответствующего точке В на диаграмме, когда прекращается поступление нефти в цилиндр. Далее газы, получившиеся после сгорания нефти, продолжают расширяться и гонят поршень дальше влево до крайнего положения, соответствующего точке С на диаграмме. При этом давление падает.
После этого начинается второй такт, при котором поршень перемещается от крайнего левого до крайнего правого положений, соответствующих точкам С и D на диаграмме. Во время второго такта впускной клапан закрыт, а выпускной на всем ходе остается открытым, вследствие чего обработанные газы выталкиваются в атмосферу. Давление в цилиндре в это время остается постоянным и немногим выше атмосферного.
При следующем движении поршня, происходящем опять справа налево (третий такт), в цилиндр всасывается воздух. В это время в нем наблюдается небольшое разрежение.
В четвертом такте впускной и выпускной клапаны закрыты и при движении поршня слева направо от точки Ε к точке А имеющийся в цилиндре воздух сжимается. В результате сжатия его температура сильно увеличивается, благодаря чему опять поданная в начале первого такта нефть воспламеняется.
Из сказанного следует, что только в первом такте двигатель развивает движущую силу, а в остальных тактах движение поршня связано с преодолением сопротивлений. Таким образом, в первом такте движущимся массам необходимо сообщить запас кинетической энергии, при помощи которой в следующих тактах преодолеваются сопротивления. Для этого на коренном валу двигателя устанавливается маховое колесо с достаточно большим моментом инерции.
Решая задачу о моменте инерции такого махового колеса, будем считать заданными угловую скорость ωср, коэффициент неравномерности движения коренного вала двигателя и индикаторную диаграмму (см. рис. 5.8, б). По оси абсцисс индикаторной диаграммы отложены величины хода поршня, а по оси ординат – давление в цилиндре, выраженное в Н/с2, которое позволяет вычислить силу, действующую па поршень:
P3 = p π D2 , 4
где P3 – сила, действующая на поршень, Н; р –удельное давление на·поршень, Н/см2; D – диаметр поршня, см.
199
При помощи рис. 5.8 для всех намеченных положений поршня можно определить величину силы Р3. Такое определение надо произвести для двух оборотов кривошипа с тем, чтобы охватить все четыре такта работы двигателя. После этого силу Р3 следует привести к точке В кривошипа, для чего надо воспользоваться теоремой Жуковского, на основании которой для рассматриваемого случая можно использовать следующее равенство:
PД = P3 Vc = P3 pc , VB pb
где РД – приведенная к точке В сила давления на поршень; Vc – скорость точки С; рс – аналог вектора этой скорости; VВ – скорость точки В; pb – аналог вектора этой скорости.
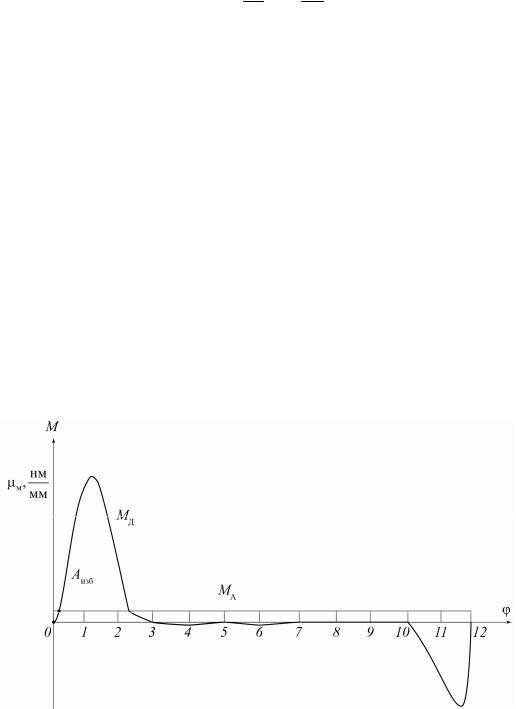
Для вычислений по формуле следует построить планы аналогов скоростей механизма двигателя. В данном случае очень удобно строить эти аналоги на схеме самого механизма. В качестве полюса намечаем точку р. Вектор рb направляем по АВ (см. рис. 5.8, а). Тем самым будем строить план аналогов скоростей, повернутый на 90°, поэтому все векторы следует поворачивать на этот угол. Из рис. 5.8, а видно, что концы векторов аналога скорости точки С располагаются на вертикальном диаметре. Воспользовавшись выполненными построениями, можно вычислить величину приведенной силы РД в каждом намеченном положении кривошипа для двух его оборотов. Умножив эти величины на длину кривошипа lAB, получим величины момента движущих сил, что дает возможность построить диаграмму МД(φ), которая изображена на рис. 5.9. Затем, пользуясь равенством, определяем величину МС момента сил сопротивления, диаграмма которого изображена на рис. 5.9 в виде горизонтальной прямой.
Рис. 5.9. Диаграммы приведенных к кривошипу механизма двигателя Дизеля движущего момента и момента сил сопротивления
200