

2.8. Моделирование и оптимизация параметров алгоритма.
Согласно алгоритму
(45) первоначально определяется максимум
ФП
 ,
а затем находится временной сдвиг
,
а затем находится временной сдвиг
 .
Можно упростить алгоритм и сделать его
более эффективным, если произвести
следующие рассуждения.
.
Можно упростить алгоритм и сделать его
более эффективным, если произвести
следующие рассуждения.
Если схема синхронизации работает по оптимальному алгоритму, то в момент синхронизации

 (47),
(47),
а при отсутствии синхронизации



 ,
,
где
 - независимые центрированные случайные
величины (СВ), т.е.
- независимые центрированные случайные
величины (СВ), т.е.
 ,
поэтому
,
поэтому
 ,
,
тогда
 (48)
(48)
Разность между средними значениями ФП в момент синхронизации и при её отсутствии по (47, 48) составляет
 (49).
(49).
Если вместо оптимального алгоритма использовать квазиоптимальный, в котором ФП имеет вид
 ,
,
тогда в момент синхронизации
 (50),
(50),
а при отсутствии синхронизации
 (51)
(51)
Разность между средними значениями ФП в момент синхронизации и при её отсутствии по (50, 51) составляет
 (52).
(52).
Из формул (49, 52)
следует, что использование квазиоптимального
алгоритма надёжнее, поскольку
 при большом количестве пилотов
при большом количестве пилотов
 ,
т.е. в упрощённом алгоритме в момент
синхронизации получается более ярко
выраженный максимум ФП.
,
т.е. в упрощённом алгоритме в момент
синхронизации получается более ярко
выраженный максимум ФП.
В стандарте EN
300 744 указаны позиции постоянных
пилотов. В режиме 2к в спектре сигнала
находятся 45 постоянных пилотов с номерами
0 48 54 87 141 156 192 201 255 279 282 333 432 450 483 525 531
618 636 714 759 765 780 804 873 888 918 939 942 969 984
1050 1101 1107 1110 1137 1140 1146 1206 1269 1323 1377 1491 1683
1704, в режиме 8к – 177 пилота. Очевидно, что
разнос по частоте
 между соседними пилотами меняется от
пары к паре, поэтому нельзя использовать
формулу (45) напрямую, а необходимо
аргумент каждого корреляционного
произведения
между соседними пилотами меняется от
пары к паре, поэтому нельзя использовать
формулу (45) напрямую, а необходимо
аргумент каждого корреляционного
произведения
 в процессе обработки делить на
в процессе обработки делить на
 .
Такое решение связано с большими
затратами ресурсов и намного усложняет
схему.
.
Такое решение связано с большими
затратами ресурсов и намного усложняет
схему.
В стандарте EN
300 744 указаны позиции переменных
пилотов, причем разнос по частоте
 между соседними пилотами не меняется
от пары к паре. Однако по ним нельзя
определить положение спектра сигнала
в частотном пространстве, потому что
позиции переменных пилотов изменяются
с периодичностью в 4 символа и зависят
от номера символа, который не известен.
между соседними пилотами не меняется
от пары к паре. Однако по ним нельзя
определить положение спектра сигнала
в частотном пространстве, потому что
позиции переменных пилотов изменяются
с периодичностью в 4 символа и зависят
от номера символа, который не известен.
Выходом из положения
может быть допущение о качественной
работе первой схемы синхронизации. Как
известно, первая схема теоретически
может обеспечить компенсацию задержки
символа до величины
 ,
разнос по частоте соседних пилотов
,
разнос по частоте соседних пилотов
 для каждой пары согласно стандарту [7],
поэтому фазовое рассогласование
для каждой пары согласно стандарту [7],
поэтому фазовое рассогласование
 ,
т.е.
,
т.е.
 лежит в первом квадранте. Тогда
лежит в первом квадранте. Тогда
 представляет собой сумму радиус-векторов
на комплексной плоскости, которые
направлены почти одинаково. При этом
представляет собой сумму радиус-векторов
на комплексной плоскости, которые
направлены почти одинаково. При этом
 изменится незначительно.
изменится незначительно.
Имитационная модель алгоритма синхронизации произведена в среде MATLAB 7.0 и Simulink 6.0. В качестве модели канала распространения была использована многолучевая модель, предложенная стандартом [19, 24].
На
рис. 14 на комплексной плоскости изображён
процесс формирования корреляционной
функции
 как суммы корреляционных произведений
в случае синхронизации и при её отсутствии.
Очевидно, что в случае синхронизации
произведения складываются в фазе, при
этом достигается условие
как суммы корреляционных произведений
в случае синхронизации и при её отсутствии.
Очевидно, что в случае синхронизации
произведения складываются в фазе, при
этом достигается условие
 ,
а при её отсутствии фаза каждого
произведения есть случайная величина,
поэтому
,
а при её отсутствии фаза каждого
произведения есть случайная величина,
поэтому
 намного меньше, т.к. по (48) мощности
складываются в среднеквадратическом.
Рис. 14 подтверждает состоятельность
предположения о фазовых соотношениях
и величине модуле КФ, поэтому постоянные
пилоты вполне можно использовать для
нахождения
намного меньше, т.к. по (48) мощности
складываются в среднеквадратическом.
Рис. 14 подтверждает состоятельность
предположения о фазовых соотношениях
и величине модуле КФ, поэтому постоянные
пилоты вполне можно использовать для
нахождения
 без каких-либо коррекций.
без каких-либо коррекций.

Рис. 14. Процесс
формирования корреляционной
функции
 в случае синхронизации (кривая 2) и при
её отсутствии (кривые 1).
в случае синхронизации (кривая 2) и при
её отсутствии (кривые 1).
После определения
 необходимо произвести коррекцию окна
FFT.
В работе предложен метод компенсации,
который основан на смещении промежуточной
частоты приёмника
необходимо произвести коррекцию окна
FFT.
В работе предложен метод компенсации,
который основан на смещении промежуточной
частоты приёмника
 .
На рис. 15 изображена часть структурной
схемы приёмного устройства, которая
включает в себя квадратурный демодулятор,
необходимый для перемещения спектра
входного сигнала на нулевую центральную
частоту. В современных цифровых системах
.
На рис. 15 изображена часть структурной
схемы приёмного устройства, которая
включает в себя квадратурный демодулятор,
необходимый для перемещения спектра
входного сигнала на нулевую центральную
частоту. В современных цифровых системах
 получают методом прямого цифрового
синтеза (DDS).
При этом очень легко реализовать
коррекцию на
получают методом прямого цифрового
синтеза (DDS).
При этом очень легко реализовать
коррекцию на
 ,
достаточно лишь изменить размер входного
слова. Однако такой подход вызывает
большие трудности. Во-первых, образуется
система с обратной связью, поведение
которой трудно промоделировать.
Во-вторых, коррекция частоты происходит
во временной области, поэтому трудно
предположить, как она повлияет на работу
первой схемы синхронизации и блока FFT
.
,
достаточно лишь изменить размер входного
слова. Однако такой подход вызывает
большие трудности. Во-первых, образуется
система с обратной связью, поведение
которой трудно промоделировать.
Во-вторых, коррекция частоты происходит
во временной области, поэтому трудно
предположить, как она повлияет на работу
первой схемы синхронизации и блока FFT
.

Рис. 15. Часть структурной схемы приёмного устройства, где
АЦП – аналого-цифровой преобразователь, ФНЧ – фильтр нижних частот, БПФ – быстрое преобразование Фурье.
Одним из альтернативных
способов коррекции частоты может быть
простое опережение или запаздывание
строба, сопровождающего спектр сигнала
на выходе блока FFT.
В стандарте указано, что в режиме 2к,
т.е. когда на выходе FFT
2048 гармоник, информационными являются
лишь 1705 из них, на остальных частотах
передаются нули, т.е. их уровень
определяется только шумом. Аналогично
в режиме 8к из 8192 гармоник используются
лишь 6817. Наиболее помехоустойчивым и
простым с точки зрения обработки является
способ передачи, при котором совмещены
центральные частоты окна FFT
и спектра сигнала. В таком случае легко
вычислить ожидаемое начало и окончание
спектра в окне FFT
и сформировать строб, т.е. сопровождающий
сигнал разрешения чтения данных из
выходного спектра, как показано на рис.
16. Ранее уже упоминалось, что без грубой
частотной синхронизации выходной спектр
сдвинут на
 гармоник, поэтому коррекцией спектра
может служить простое смещение
разрешающего строба на
гармоник, поэтому коррекцией спектра
может служить простое смещение
разрешающего строба на
 гармоник, что равносильно изменению
гармоник, что равносильно изменению
 ,
но легко моделируется и не содержит
обратной связи, а значит, исключает
влияние на другие блоки.
,
но легко моделируется и не содержит
обратной связи, а значит, исключает
влияние на другие блоки.
По своему принципу, достоинствам и недостаткам, две схемы коррекции аналогичны регулированию «вперёд» и регулированию «назад».

Рис. 16. Коррекция строба на выходе FFT, где 1 – диапазон коррекций строба, 2 - окно FFT, 3 – окно спектра сигнала.
Для реализации
системы синхронизации необходимо
определить максимально возможное
смещение частоты
 спектра. Как известно, смещение частоты
происходит при относительном перемещении
приёмника и передатчика и равно частоте
Доплера
спектра. Как известно, смещение частоты
происходит при относительном перемещении
приёмника и передатчика и равно частоте
Доплера
 (53),
(53),
где
 - радиальная скорость, а
- радиальная скорость, а
 - длина волны несущей. Такое смещение
возникает, когда телевизор находится
в автомобиле или самолёте. Упростим
формулу (39) с учётом
- длина волны несущей. Такое смещение
возникает, когда телевизор находится
в автомобиле или самолёте. Упростим
формулу (39) с учётом
 ,
где
,
где

 - скорость света, а
- скорость света, а
 - частота несущей, тогда
- частота несущей, тогда
 (54).
(54).
Для расчёта
максимального смещения воспользуемся
самыми неблагоприятными условиями:

 ,
а
,
а
 Гц согласно стандарту [19]. Тогда из (54)
получим
Гц согласно стандарту [19]. Тогда из (54)
получим
 Гц. В режиме 8к расстояние между поднесущими
минимально и равно
Гц. В режиме 8к расстояние между поднесущими
минимально и равно
 Гц. Таким образом, максимальное смещение
можно найти по формуле
Гц. Таким образом, максимальное смещение
можно найти по формуле
 .
Для обеспечения запаса произведём
коррекцию
.
Для обеспечения запаса произведём
коррекцию
 .
Так как смещение частоты может произойти
в любую сторону (влево или вправо), то
количество каналов параллельной
обработки 7*2+1=15.
.
Так как смещение частоты может произойти
в любую сторону (влево или вправо), то
количество каналов параллельной
обработки 7*2+1=15.
Из формулы (48)
следует, что КФ есть сумма произведений,
причём перемножитель комплексных чисел
аппаратно требует 4 перемножителя
действительных чисел, поэтому при
разрядности данных FFT
более 8 бит требуется много ресурсов
(15*4=60 перемножителей). Выходом из положения
является применение знакового алгоритма
к данным FFT,
в котором используются только знаки
 и
и
 ,
т.е. значения отсчётов могут принимать
значения из множества
,
т.е. значения отсчётов могут принимать
значения из множества
 в зависимости от знака (знаковое
ограничение сигнала). На
рис. 17 на комплексной плоскости изображён
процесс формирования корреляционной
функции
в зависимости от знака (знаковое
ограничение сигнала). На
рис. 17 на комплексной плоскости изображён
процесс формирования корреляционной
функции
 по
знаковому алгоритму в случае синхронизации
и при её отсутствии.
по
знаковому алгоритму в случае синхронизации
и при её отсутствии.

Рис. 17. Процесс
формирования корреляционной
функции
 по знаковому алгоритму в случае
синхронизации (кривая 2) и при её отсутствии
(кривые 1).
по знаковому алгоритму в случае
синхронизации (кривая 2) и при её отсутствии
(кривые 1).
Вместе с упрощением происходит потеря надёжности алгоритма.
Если в квазиоптимальном алгоритме использовать знаковое ограничение, то

в каждом из каналов параллельной обработки.
С учётом выполнения условий (50, 51) можно записать в момент синхронизации
 (55),
(55),
а при отсутствии синхронизации
 (56).
(56).
Для сравнения
алгоритмов полученные результаты
необходимо масштабировать до совпадения
максимумов ФП. Для этого умножим (55, 56)
на
 ,
тогда
,
тогда
 (57),
(57),
а при отсутствии синхронизации
 (58).
(58).
Разность между средними значениями ФП в момент синхронизации и при её отсутствии по (57, 58) составляет
 .
.
Тогда отношение
 ,
т.е. потери незначительны, но вместе с
тем выигрыш в аппаратной реализации
велик.
,
т.е. потери незначительны, но вместе с
тем выигрыш в аппаратной реализации
велик.
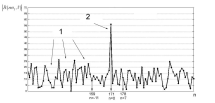
На рис 18 а,б.
представлены результаты моделирования
и расчёта
 для одного символа при использовании
числового и знакового алгоритмов
соответственно.
для одного символа при использовании
числового и знакового алгоритмов
соответственно.

(а)
(б)
Рис 18.а,б. Результаты
моделирования и расчёта
 при использовании числового (а) и
знакового (б) алгоритмов в случае
синхронизации (кривая 2) и при её отсутствии
(кривые 1).
при использовании числового (а) и
знакового (б) алгоритмов в случае
синхронизации (кривая 2) и при её отсутствии
(кривые 1).
Для увеличения
достоверности результатов необходимо
усреднение результата по символам.
Наиболее просто и эффективно произвести
усреднение по методу, согласно которому
результат определения
 считается правильным, если номер канала
считается правильным, если номер канала
 повторяется в течение
повторяется в течение
 символов, в противном случае сохраняется
предыдущий результат определения
символов, в противном случае сохраняется
предыдущий результат определения
 .
Стоит отметить, что с повышением
надёжности результата схема становится
более инерционной, поэтому
.
Стоит отметить, что с повышением
надёжности результата схема становится
более инерционной, поэтому
 не должно превышать несколько десятков.
На рис. 9 приведена структурная схема
грубой частотной синхронизации с
многоканальной обработкой информации
и устройством усреднения размерности
не должно превышать несколько десятков.
На рис. 9 приведена структурная схема
грубой частотной синхронизации с
многоканальной обработкой информации
и устройством усреднения размерности
 .
На входе схемы расположен генератор
псевдослучайной последовательности.
Точно такой же генератор применяется
на передающем устройстве. Таким образом,
реализуется система скремблер
– дескремблер, функционально она не
влияет на работу схемы синхронизации.
Счётчик СТ включается каждый раз в
начале символа и означает номер гармоники.
Постоянное запоминающее устройство
(ПЗУ) ROM
использует показания счётчика как
адрес, её назначение – подать разрешающий
сигнал в случае, если текущая гармоника
является пилот – сигналом.
.
На входе схемы расположен генератор
псевдослучайной последовательности.
Точно такой же генератор применяется
на передающем устройстве. Таким образом,
реализуется система скремблер
– дескремблер, функционально она не
влияет на работу схемы синхронизации.
Счётчик СТ включается каждый раз в
начале символа и означает номер гармоники.
Постоянное запоминающее устройство
(ПЗУ) ROM
использует показания счётчика как
адрес, её назначение – подать разрешающий
сигнал в случае, если текущая гармоника
является пилот – сигналом.

Рис. 19. Схема грубой
частотной синхронизации с многоканальной
обработкой информации и устройством
усреднения размерности
 .
.
После определения
 становится известным начало спектра,
поэтому можно использовать переменные
пилоты для расчёта
становится известным начало спектра,
поэтому можно использовать переменные
пилоты для расчёта
 .
Поскольку
.
Поскольку
 можно определить только по численному
алгоритму, то знаковый алгоритм не
используется. Расстояние между переменными
пилотами постоянно и равно
можно определить только по численному
алгоритму, то знаковый алгоритм не
используется. Расстояние между переменными
пилотами постоянно и равно
 ,
поэтому
,
поэтому
 ,
в режиме 2к
,
в режиме 2к
 тогда
тогда
 .
Для измерения
.
Для измерения
 помимо начала символа необходимо знать
ещё и номер символа. Согласно стандарту,
как показано на рис. 12, позиции переменных
пилотов меняются с периодичностью 4
символа. Например, в нулевом символе
первый пилот на 0 позиции, в первом
символе – на 3, во втором – на 6, в третьем
– на 9, в четвёртом – на 0, и т.д. Поскольку
начало передачи неизвестно, то необходимо
определить, на какой из четырёх позиций
находится первый пилот. Для этого
необходимо 4 канала, каждый из которых
настроен на определённое начало символа.
По своему принципу схема аналогична
системе определения
помимо начала символа необходимо знать
ещё и номер символа. Согласно стандарту,
как показано на рис. 12, позиции переменных
пилотов меняются с периодичностью 4
символа. Например, в нулевом символе
первый пилот на 0 позиции, в первом
символе – на 3, во втором – на 6, в третьем
– на 9, в четвёртом – на 0, и т.д. Поскольку
начало передачи неизвестно, то необходимо
определить, на какой из четырёх позиций
находится первый пилот. Для этого
необходимо 4 канала, каждый из которых
настроен на определённое начало символа.
По своему принципу схема аналогична
системе определения
 на рис. 9. На каждом символе один из
каналов даёт максимум, и по номеру этого
канала можно определить положение
первого пилота в символе. На рис. 10.
представлены расчётные значёния
на рис. 9. На каждом символе один из
каналов даёт максимум, и по номеру этого
канала можно определить положение
первого пилота в символе. На рис. 10.
представлены расчётные значёния
 для каждого из четырёх каналов
для каждого из четырёх каналов
 за четыре последовательные символа.
за четыре последовательные символа.

Рис. 20. Расчётные
значёния
 для каждого из четырёх каналов
для каждого из четырёх каналов
 за четыре последовательные символа.
за четыре последовательные символа.
Очевидно, что при
безошибочной работе номера каналов с
максимумом
 за серию символов образуют последовательность
чисел 1 2 3 4 1 2 3 4 1 2 … На основе этого
свойства можно организовать устройство
усреднения, принцип которого заключается
в том, что результат определения позиции
пилота в 4, или 8, или 12, или т.д. символах
считается правильным, если номера
каналов с максимумом
за серию символов образуют последовательность
чисел 1 2 3 4 1 2 3 4 1 2 … На основе этого
свойства можно организовать устройство
усреднения, принцип которого заключается
в том, что результат определения позиции
пилота в 4, или 8, или 12, или т.д. символах
считается правильным, если номера
каналов с максимумом
 образуют последовательность чисел 1 2
3 4, или 1 2 3 4 1 2 3 4, или 1 2 3 4 1 2 3 4 1 2 3 4, или
т.д., в противном случае
образуют последовательность чисел 1 2
3 4, или 1 2 3 4 1 2 3 4, или 1 2 3 4 1 2 3 4 1 2 3 4, или
т.д., в противном случае
 не измеряется, и, соответственно,
сохраняет прежнее измеренное значение.
На рис. 12. изображена четырёхканальная
структурная схема точного измерителя
времени запаздывания с устройством
усреднения размерности
не измеряется, и, соответственно,
сохраняет прежнее измеренное значение.
На рис. 12. изображена четырёхканальная
структурная схема точного измерителя
времени запаздывания с устройством
усреднения размерности
 и
схемой переключения каналов, показанными
условно.
и
схемой переключения каналов, показанными
условно.

Рис. 21. Четырёхканальная
структурная схема точного измерителя
времени запаздывания с устройством
усреднения размерности
 и схемой переключения каналов.
и схемой переключения каналов.
В отличие от схемы
на рис. 19, в данной системе не обязательно
использовать ПЗУ, потому что для
формирования разрешающего сигнала на
ключ достаточно счётчика CТ12,
который считает с периодом 12 тактов и
один раз за период вырабатывает сигнал
разрешения. Этот сигнал разрешения
распространяется по каналам с задержкой
в 3 такта, тем самым обеспечивая настройку
каналов на определённое с точки зрения
переменных пилотов начало символа. Блок
MAX
назначает мультиплексору MS
канал, с которого следует считывать
 ,
и разрешает считывание при обнаружении
последовательности чисел 1 2 3 4 и т.д.
,
и разрешает считывание при обнаружении
последовательности чисел 1 2 3 4 и т.д.
Результаты
имитационного и математического
моделирования показали, что
 при усреднении за 1 суперкадр, тогда
при усреднении за 1 суперкадр, тогда
 .
.
 ,
,
 (59).
(59).
Рассчитаем, как влияет такое среднеквадратическое отклонение определения задержки на фазу крайней в спектре гармоники, т.е. в худшем случае, тогда с учётом (59)
 (60).
(60).
Численное значение
 ,
т.е. в среднем без усреднения по символам
радиус – вектор крайней в спектре
гармоники на комплексной плоскости
поворачивается на
,
т.е. в среднем без усреднения по символам
радиус – вектор крайней в спектре
гармоники на комплексной плоскости
поворачивается на
 .
Это довольно много, потому что в случае
использования модуляции QAM64
в иерархическом режиме при
.
Это довольно много, потому что в случае
использования модуляции QAM64
в иерархическом режиме при
 минимальная
разность фаз составляет
минимальная
разность фаз составляет
 [21].
Одним из возможных способов уменьшения
[21].
Одним из возможных способов уменьшения
 является усреднение по символам.
Результаты моделирования показали, что
распределение
является усреднение по символам.
Результаты моделирования показали, что
распределение
 близко к нормальному, поэтому СКО
усреднённой за
близко к нормальному, поэтому СКО
усреднённой за
 символов задержки можно найти по формуле
символов задержки можно найти по формуле
 [22]. Согласно формулам (59, 60) случайное
изменение фазы гармоники также
уменьшается. Например, при усреднении
по
[22]. Согласно формулам (59, 60) случайное
изменение фазы гармоники также
уменьшается. Например, при усреднении
по
 символам среднеквадратическое отклонение
фазы уменьшается до
символам среднеквадратическое отклонение
фазы уменьшается до
 .
.
Ранее уже упоминалось, что аппаратные затраты на перемножитель велики, поэтому вопрос о разрядности данных с выхода FFT актуален.
Для оценки разрядности данных, т.е. количества бит, с помощью которых представляются отсчёты спектра, необходимо учесть влияние шума квантования на точность результата.
Как известно, шум
квантования
 имеет равномерное распределение в
пределах
имеет равномерное распределение в
пределах
 ,
где
,
где
 - расстояние между соседними уровнями
квантования. Такой процесс имеет
характеристики
- расстояние между соседними уровнями
квантования. Такой процесс имеет
характеристики
 и
и
 [23]. В таблице 1 приведены среднее значение
и среднеквадратическое отклонение
аргумента КФ при различных значениях
разрядности
[23]. В таблице 1 приведены среднее значение
и среднеквадратическое отклонение
аргумента КФ при различных значениях
разрядности
 представления
гармоник на выходе FFT.
Если сравнить таблицу с показаниями
(59), то можно сделать заключение, что для
сохранения точности разрядность
представления
гармоник на выходе FFT.
Если сравнить таблицу с показаниями
(59), то можно сделать заключение, что для
сохранения точности разрядность
 не должна быть меньше 8 бит, а для надёжной
работы требуется
не должна быть меньше 8 бит, а для надёжной
работы требуется
 бит.
бит.

Таблица 1. Среднее
значение и среднеквадратическое
отклонение аргумента корреляционной
функции при различных значениях
разрядности
 представления
гармоник на выходе FFT.
представления
гармоник на выходе FFT.