

Таблица 18
Вариант |
T |
mN |
σN |
Вариант |
T |
mN |
σN |
1 |
200 |
0 |
1 |
14 |
250 |
0 |
1.8 |
2 |
200 |
0 |
1.5 |
15 |
250 |
0 |
2.8 |
3 |
200 |
0 |
2 |
16 |
250 |
0 |
3.8 |
4 |
200 |
0 |
2.5 |
17 |
250 |
0 |
0.8 |
5 |
200 |
0 |
3 |
18 |
250 |
0 |
2.2 |
6 |
200 |
0 |
3.5 |
19 |
250 |
0 |
1.2 |
7 |
300 |
0 |
1 |
20 |
400 |
0 |
3.2 |
8 |
300 |
0 |
1.5 |
21 |
400 |
0 |
1.5 |
9 |
300 |
0 |
2 |
22 |
400 |
0 |
2 |
10 |
300 |
0 |
2.5 |
23 |
400 |
1 |
2.5 |
11 |
300 |
0 |
3 |
24 |
400 |
1 |
3 |
12 |
300 |
0 |
1.7 |
25 |
400 |
1 |
1.0 |
13 |
300 |
0 |
2.7 |
26 |
400 |
1 |
2.0 |
Лабораторная работа № 11 динамические модели объектов управления
Цель работы: изучение методов получения и исследования динамических характеристик объектов управления с использованием инструментальных средств Mathcad.
Порядок выполнения работы
Изучить математическую модель смешения двух компонентов и построить для линеаризованной системы дифференциальных уравнений графическое отображение динамики процесса для измеряемых и не измеряемых выходов.
Решения найти при нулевых начальных условиях и различных входных воздействиях:
аналитическим способом;
одним из численных методов, реализованным в виде процедуры Mathcad.
Теоретические сведения
Среди методов получения математических моделей объектов управления наиболее распространенными являются:
экспериментальные или активные [10, 12], заключающиеся в подаче на входы объекта воздействий определенной формы (ступенчатых, импульсных, гармонических) и анализе полученных откликов;
пассивные, основанные на использовании результатов опытной эксплуатации;
аналитические;
комбинированные.
Экспериментальное исследование динамики объектов с целью получения переходных процессов (кривых разгона) или частотных характеристик связано с существенными материальными затратами и не всегда возможно в необходимых интервалах изменения входных воздействий. Последний недостаток присущ также и пассивному методу. Более широкими возможностями обладает метод аналитического описания, но в большинстве случаев проблема его получения для технологических объектов достаточно сложная, так как движение материальных потоков описывается системой нелинейных дифференциальных уравнений в частных производных, уравнения материальных и тепловых балансов, фазовых переходов также нелинейные, физические величины, используемые в описании процессов тепло- и массообмена зависят от многих факторов и не всегда известны на стадии разработки системы управления. Их уточнение возможно в процессе эксплуатации объекта или предварительного его активного исследования (комбинированный метод).
Рассмотрим
задачу аналитического получения
математического описания объекта на
примере смесителя двух компонентов. На
рис. 60 представлена схема смешения.
Емкость, в которой происходит непрерывное
перемешивание поступающих потоков
жидкостей имеет объем V. Первый поток
имеет расход
![]() и концентрацию
и концентрацию
![]() .
Второй поток имеет расход
.
Второй поток имеет расход
![]() и концентрацию
и концентрацию
![]() .
После смешения на выходе из емкости
общий расход жидкости составляет
.
После смешения на выходе из емкости
общий расход жидкости составляет
![]() ,
а концентрация вещества –
,
а концентрация вещества –
![]() ,
,
![]() –
уровень жидкости.
–
уровень жидкости.
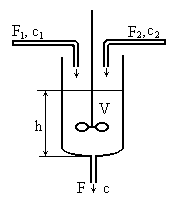
Рис. 60. Схема смешения
Составим уравнения баланса масс, которые имеют вид:
 (59)
(59)
где
![]() [м3/с] – потоки, которые поступают
в бак с концентрациями
[м3/с] – потоки, которые поступают
в бак с концентрациями
![]() [кмоль/с] соответственно, а выходной
поток имеет расход
[кмоль/с] соответственно, а выходной
поток имеет расход
![]() [м3/с] и концентрацию
[м3/с] и концентрацию
![]() [кмоль/с].
Расход выходного
потока
[кмоль/с].
Расход выходного
потока
![]() зависит от высоты столба жидкости
зависит от высоты столба жидкости
![]() [м] в соответствии с законом истечения:
[м] в соответствии с законом истечения:
![]() , (60)
, (60)
где
![]() [м2/с] – экспериментальная константа;
[м2/с] – экспериментальная константа;
![]() [м2] – площадь поперечного сечения
бака.
[м2] – площадь поперечного сечения
бака.
Подставляя это выражение в (59) получаем нелинейную модель смешения:
![]()
![]()
В установившемся состоянии, полагая в (59) производные равными нулю, получаем:
 (61)
(61)
Аналогично вместо (60) в установившемся состоянии будем иметь:
![]() . (62)
. (62)
При
заданных
![]() эти уравнения можно разрешить относительно
эти уравнения можно разрешить относительно
![]() .
.
Предположим, что возникли небольшие отклонения относительно установившегося состояния. Тогда можно записать:
 (63)
(63)
Здесь u1(t), u2(t) [м3/с] естественно рассматривать как входные переменные относительно отклонений, а х1(t) [м3], х2(t) [кмоль/с] соответственно как переменные состояния.
Задача состоит в исследовании динамики процесса смешения и его поведения при использовании различных законов регулирования. В дальнейшем рассматривается процесс при небольших отклонениях от установившегося состояния. Учитывая что величина потока F(t) имеет нелинейную зависимость, определенную выражением (60), целесообразно провести линеаризацию. Из (60) и (62) имеем, с учетом третьего соотношения в (63):
![]()
![]()
![]() (64)
(64)
где
![]() [с] – постоянная времени объекта.
[с] – постоянная времени объекта.
Подставляя (63) и (64) в уравнения баланса (58), получаем линеаризованную систему уравнений в виде
![]() ,
(65)
,
(65)
![]() . (66)
. (66)
Исключая
![]() из (66) с помощью (65), полученную систему
уравнений можно представить в матричном
виде
из (66) с помощью (65), полученную систему
уравнений можно представить в матричном
виде
 .
.
Здесь
x(t)=(![]() а
а
![]() .
Для более полного описания введем
выходные переменные, которые непосредственно
доступны для измерения.
.
Для более полного описания введем
выходные переменные, которые непосредственно
доступны для измерения.
В данном случае положим
![]() ,
,
![]() .
.
В матричном виде это выражение можно записать:
В результате получаем линеаризованную математическую модель смешения, которую можно записать в виде:
![]() , (67)
, (67)
![]() (68)
(68)
Здесь матрицы А, В и С определены следующими выражениями:
 ,
,
 ,
,
 .
.
Решение
линейного дифференциального уравнения
(67) подставляем в (68) и в результате
получаем выражение относительно выходной
переменной
![]() ,
которое описывает динамическую связь
между измеряемым входом и выходом
системы.
,
которое описывает динамическую связь
между измеряемым входом и выходом
системы.