

пособие тмм умо
.pdf
|
Задание 10. Самоходное шасси |
|
|
|
|
|
|
|
||||||
|
Самоходное шасси с двухтактным двигателем внутреннего сгорания предна- |
|||||||||||||
значено для перемещения грузов. Кривошипно-ползунный механизм двигателя |
||||||||||||||
преобразует возвратно-поступательное движение ползуна (поршня) 3 во враща- |
||||||||||||||
тельное движение кривошипа 1. Цикл движения поршней включает такты расши- |
||||||||||||||
рения (в конце такта открываются выпускные |
клапаны и продувочные |
окна, |
||||||||||||
|
|
|
|
|
|
|
|
|
цилиндра |
и продукты горения уда- |
||||
|
3 |
|
Рд |
|
|
|
|
|
ляются в выпускную систему) и такт |
|||||
в.м.т. |
|
|
|
|
|
|
|
|||||||
|
|
0 |
0,5 |
1,0 |
1,5 |
2,0 |
2,5 |
|||||||
|
|
сжатия, заканчивающийся |
взрывом |
|||||||||||
|
|
|
|
|
|
|
|
Р, мПа |
||||||
|
|
|
В |
|
|
|
|
|
||||||
|
|
|
|
Сжатие |
|
|
|
впрыснутого в цилиндр топлива |
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
S |
|
|
|
|
Расширение |
|
|
|
При |
расчетах принять : |
1). |
Масса |
||
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
звеньев: шатуна m2 = ql2, где |
q = 10 |
|||||
|
|
|
|
|
|
|
|
|
||||||
н.м.т. |
|
|
|
|
|
|
|
|
кг/м; |
ползуна m3 = 0,3 m2 ; |
криво- |
|||
|
|
1 S |
|
|
|
|
|
шипа m1 = 2m2 . 2). Центр масс шату- |
||||||
S2 |
|
|
Линия атмосферного |
|
|
|
||||||||
|
|
|
|
давления |
|
|
|
на в точке S2 с координатой |
AS2 = |
|||||
l2 |
|
|
|
|
|
|
|
|
||||||
А |
|
|
|
|
|
|
|
|
0,35 AB. 3). Момент инерции относи- |
|||||
1 |
|
|
|
|
|
|
|
|
тельно |
центра |
масс |
шатуна |
||
|
|
|
|
|
|
|
|
|
||||||
|
|
l1 |
О |
|
|
|
|
|
JS2 0,17m2 l22 . Кривошип |
уравнове- |
||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
шен. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10 |
|
Исходные данные
ПАРАМЕТР |
|
ЧИСЛОВЫЕ ЗНАЧЕНИЯ ВАРИАНТОВ |
|
||||||||
|
|
|
|
|
|
|
|
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Угловая скорость |
220 |
215 |
210 |
205 |
200 |
195 |
190 |
185 |
180 |
170 |
|
кривошипа ω, с-1 |
|||||||||||
Ход ползуна S, м |
0,08 |
0,085 |
0,09 |
0,095 |
0,1 |
0,105 |
0,11 |
0,115 |
0,12 |
0,125 |
|
Отношение хода |
|
|
|
|
|
|
|
|
|
|
|
поршня к его диа- |
1,0 |
0,8 |
0,9 |
1,0 |
0,8 |
1,2 |
1,1 |
1,25 |
1,15 |
1,0 |
|
метру S/D, м |
|
|
|
|
|
|
|
|
|
|
|
Отношение длины |
|
|
|
|
|
|
|
|
|
|
|
кривошипа к длине |
0,2 |
0,2 |
0,22 |
0,25 |
0,24 |
0,25 |
0,25 |
0,2 |
0,2 |
0,24 |
|
шатуна λ=l1/l2 |
|
|
|
|
|
|
|
|
|
|
|
Приведенный мо- |
|
|
|
|
|
|
|
|
|
|
|
мент инерции транс- |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
1,8 |
2,0 |
|
миссии Iп0, кг.м2 |
|
|
|
|
|
|
|
|
|
|
|
Коэффициент нерав- |
|
|
|
|
|
|
|
|
|
|
|
номерности враще- |
0,01 |
0,009 |
0,01 |
0,011 |
0,012 |
0,011 |
0,01 |
0,009 |
0,013 |
0,012 |
|
ния кривошипа δ |
|
|
|
|
|
|
|
|
|
|
|
61

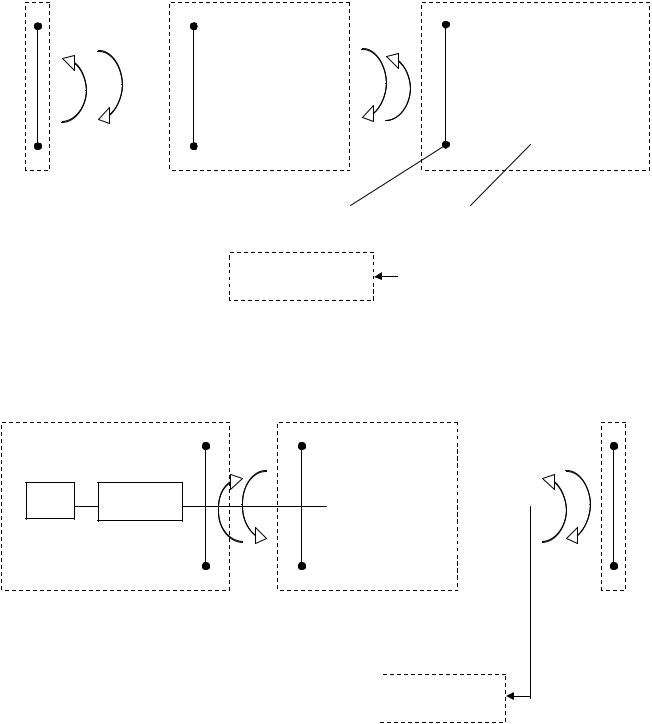
3.2 Методические указания по выполнению курсовой работы
Структурный и кинематический анализ
В курсовой работе предлагается анализ четырех схем кривошипно-
ползунных механизмов, представленных на рис. 3.1.
На рис. 3.1 приняты следующие обозначения: N – номер схемы кривошипно-
ползунного механизма; а - признак сборки механизма: а=1, если ползун расположен справа (сверху) от начала координат; а= -1, если ползун слева (снизу) от на-
чала координат; l1 – длина кривошипа ОА; l2 – длина шатуна АВ; е – эксцентриси-
тет (смещение); S – ход ползуна В; 1, 2 - углы, образованные кривошипом 1 и
шатуном 2 с осью X, отсчитываются от положительного направления оси Х про-
тив часовой стрелки.
y |
|
|
N=1 |
|
|
|
2 |
|
a=1 |
|
|
||
|
|
|
|
|||
1 |
A |
|
2 l2 |
B |
3 |
|
l1 |
S2 |
|||||
e |
|
|
||||
O |
1 |
|
|
x |
||
|
|
|
|
S |
||
|
|
|
|
|
|
|
|
N=3 |
y |
2 |
|
|
|
|
a=-1 |
|||
3 |
B |
2 |
l2 |
|
A |
|
l1 |
1 |
|||||
|
|
e |
S2 |
|||
|
|
|
O |
1 |
||
|
S |
|
|
|
x |
|
|
|
|
|
|
N=2 |
|
y |
|
N=4 |
y |
|
2 |
a=1 |
3 |
|
|
a=-1 |
|
|
|
|
|
|
1 |
|
|||
|
|
|
|
|
A |
||
|
|
|
|
|
|
||
|
B |
|
S |
|
|
l1 1 |
|
|
|
|
O |
x |
|||
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
S2 |
||
|
2 |
e |
|
|
|
||
|
|
|
|
|
|
||
|
S2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
2 |
|
|
e |
l2 |
|
|
|
|
|
|
|
|
||
|
A |
l1 |
1 |
|
|
|
|
|
1 |
|
|
|
|
||
|
O |
x |
B |
|
S |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
3 |
|
|
|
Р и с. 3.1. Схемы кривошипно-ползунных механизмов
62

Первоочередной задачей проектирования кривошипно-ползунного механиз-
ма является его синтез, т.е. определение недостающих размеров звеньев по некоторым данным входных параметров. Примеры синтеза:
Задача 1.
Спроектировать кривошипно-ползунный механизм, схема которого приведе-
на на рис. 3.2. Входные параметры: ход ползуна S, средняя скорость движения ползуна Vср, максимальный угол давления между шатуном и ползуном доп. .
Решение
Отношение длины кривошипа к длине шатуна =l1/l2=sin . Длина криво-
шипа l1 соответственно равна 1=S/2 (м). Длина шатуна l2=l1/ (м). Время одного оборота вала кривошипа (период), c, t=2S/Vср. Частота вращения вала кривошипа n1=60/t об/мин, а его угловая скорость 1 n1/30 (c-1).
|
B1 |
|
|
|
3 |
|
A2 |
|
B |
S |
C |
|
|
||
|
|
|
l1 |
2 |
[ ] |
B2 |
A1 |
|
|
|
B2 |
|
|
A1 |
|
|
|
|
S |
|
1 |
|
l2 |
A |
|
|
|
|
|
O |
B1 |
|
|
|
|
|
|
|
e |
|
|
A2 |
|
Р и с. 3.2. Синтез кривошипно-ползунного |
Р и с. 3.3. Синтез кривошипно- |
||
механизма по углу давления |
ползунного механизма с эксцентриситетом |
||
63

Задача 2. Спроектировать кривошипно-ползунный механизм, схема которого приведена на рис. 3.3. Входные параметры: ход ползуна S, отношение длины кри-
вошипа к длине шатуна 1 / 2 ; отношение эксцентриситета к длине кривошипа е/ 1.
Решение. Длина шатуна l2, (м); 2 |
|
S |
|
. |
|||
|
|
|
|
|
|||
(1 )2 2 2 (1 )2 2 2 |
|||||||
|
|
|
|
||||
Длина кривошипа l1 = l2 , м. Эксцентриситет е = l1 , м.
Кинематический анализ кривошипно-ползунного механизма
Студенту предлагается произвести кинематический анализ механизма на ста-
дии установившегося движения тремя методами: планов, кинематических диаграмм и замкнутого векторного контура.
План механизма строят для 12 последовательных положений начального звена (кривошипа) в пределах одного оборота. Все положения нумеруются в на-
правлении вращения кривошипа. Начальное положение кривошипа задается уг-
лом 0 , отсчитываемым от положительного направления оси X против часовой стрелки. В зависимости от номера схемы кривошипно-ползунного механизма рис. 3.1 формулы для определения угла 0 (в радианах) приведены в табл.3.1.
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.1 |
||||
|
Начальное положение кривошипа 0 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Номер схемы |
Угол 0 при эксцентриситете, рад |
|
|
|
|
|
|||||||||||
механизма по |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 1 |
|
|
|
|
е 0 |
е 0 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о arcsin |
|
|
|
e |
|
|
|
|
|
|
||||||
N=1 |
l1 l2 |
0 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
e |
|
|
|
||||||
N=2 |
о |
|
|
-arcsin |
|
|
|
|
|
|
|
|
|
||||
2 |
l1 l2 |
|
|
|
|
||||||||||||
|
|
|
|
2 |
|
|
|||||||||||
|
о arcsin |
|
e |
|
|
|
|
|
|
||||||||
N=3 |
l1 l2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||
N=4 |
о |
3 |
|
arcsin |
e |
|
|
3 |
|||||||||
|
|
l1 l2 |
|||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Планы скоростей и ускорений строят для одного положения начального звена. Алгоритм их построения описан в лекции №2. Построение кинематических диаграмм представлено в лекции №2 и в источнике стр. 68-78
64

Таблица 3.2
Алгоритм расчёта кинематических параметров кривошипно-ползунного механизма
Расчётные пара- |
Механизмы с горизонтальным движением ползу- |
|
|
Механизмы с вертикальным движением ползуна. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
метры |
|
|
|
|
на. Расчётные схемы №1 и 3 по рис. 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Расчётные схемы №2 и 4 по рис. 1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Функции положе- |
x |
A |
l |
cos , |
y |
A |
|
l |
sin |
1 |
, |
|
x |
B |
|
x |
A |
|
|
|
|
|
|
|
|
|
|
|
x |
A |
l |
cos , |
|
|
y |
A |
l |
sin , |
|
|
y |
B |
|
y |
A |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
ний |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a l22 e yA 2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a l22 e xA 2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
cos 2 |
|
xB xA |
, |
|
|
sin 2 |
|
e yA |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos 2 |
|
e xA |
, |
|
sin 2 |
|
yB yA |
, |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
xs2 |
xA l3 cos 2 , |
|
ys2 |
yA l3 sin 2 |
|
|
|
|
|
|
|
|
|
|
xs2 |
xA l3 cos 2 , |
ys2 yA l3 sin 2 |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Аналоги линейных |
и21 |
|
|
|
x A |
|
|
, |
|
|
|
|
и31 y A l2и21 sin 2 , |
|
|
|
|
|
и21 |
|
|
|
y A |
|
|
|
, |
|
и31 x A l2и21 cos 2 , |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
и угловых скоро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 sin 2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
l2 cos 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
стей и ускорений |
и'21 |
|
y A l2и212 |
sin 2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и' |
21 |
x A l2и212 |
cos 2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l2 cos 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 sin 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' cos 2 , |
|
|||||||||||||||||||||
|
и'31 x A l2и'21 sin 2 |
l2и212 |
cos 2 , |
|
|
|
|
|
|
и' |
31 y A l2и212 |
sin 2 |
|
l2и21 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
y A и21l3 sin |
2 , |
|
|
|
|
|
|
|
x A и21l3 cos 2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 sin 2 , |
|
|
|
|
|
|
|
|
x A |
l3и21 cos 2 , |
|||||||||||||||||||||||||||||||||||||||||||||
|
xs 2 |
|
|
ys 2 |
|
|
|
|
xs2 y A l3и |
|
|
|
ys2 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
x |
|
x |
A |
|
и2 |
l |
3 |
|
cos |
2 |
и |
'21l |
3 |
sin |
2 |
, |
|
|
|
|
|
|
x |
2 |
|
x |
A |
|
l |
3 |
и |
'21 sin |
2 |
|
l |
3 |
и |
2 |
|
|
cos |
2 |
, |
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
s 2 |
|
|
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
y |
|
y |
A |
и2 |
|
l |
3 |
sin |
2 |
|
и |
'21l |
3 |
cos |
2 |
. |
|
|
|
|
|
|
y |
2 |
|
|
y |
A |
|
l |
3 |
и |
' |
21 cos |
2 |
|
l |
3 |
и2 |
sin |
2 |
. |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
s 2 |
|
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
|
|
|
|
|
|||||||||||||||||||||||||||
Истинные линей- |
|
|
|
|
|
|
|
vA 1l1, |
2 |
и21 1k, |
|
2 |
|
и'21 12, |
vB |
и31 1k, |
|
|
|
аB и'31 12, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
ные и угловые |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vs2 |
|
2 |
2 |
|
|
|
cos vs2 |
|
|
|
|
vs2 , |
|
sin vs2 |
|
|
|
vs2 , |
|
||||||||||||||||||||||||||||||||||||||
скорости и ускоре- |
|
|
|
|
|
|
|
xs2 |
xs2 1k, |
|
|
ys2 |
|
ys2 1k, |
|
|
|
|
xs2 ys2 , |
|
|
xs2 |
|
ys2 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ния |
|
|
|
|
|
|
|
x |
x |
|
2, |
|
y |
|
y 2 |
, |
|
|
а |
s2 |
|
x2 |
y2 |
, |
|
|
|
cos |
ws |
2 |
x |
|
|
|
w |
|
, |
sin |
ws2 |
y |
|
|
w |
. |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
s2 |
|
|
|
|
s2 1 |
|
|
|
|
s2 |
|
|
|
s2 1 |
|
|
|
|
|
|
s2 |
|
s2 |
|
|
|
|
|
|
|
|
|
|
|
|
s2 |
|
s2 |
|
|
|
|
|
|
|
|
|
s2 |
|
|
|
s2 |
|
|||||||||||||||||||||||||
Пр и м е ч а н и я. 1. a – признак сборки механизма: а = 1 для схем №1 и 2 по рис. 3.1; а = -1 для схем №3 и 4 по рис. 3.1.
2.k – параметр, определяющий направление вращения кривошипа; k = 1 – вращение против часовой стрелки; k = -1 – вращение по часовой стрелке.
65

Алгоритм аналитического метода кинематического расчета кривошипно-
ползунного механизма с горизонтальным и вертикальным движением ползуна приведен в табл. 3.2.
Силовой расчет
Задачей силового расчета является определение реакций в кинематических парах при известных внешних силах (сил тяжести, сил движущих или полезного сопротивления, сил инерции). Алгоритм силового расчета кривошипноползунного механизма представлен в табл. 3.3. Механическая характеристика машинного агрегата представляет собой зависимость сил полезного сопротивления(для рабочих машин) или движущих сил (для машин – двигателей) от какого-
либо кинематического параметра, в роли которого чаще всего принимается перемещение ползуна. Если механическая характеристика задана в виде диаграммы
F=f(S), то необходимо произвести ее графическую обработку и определить значение сил сопротивления или движущих сил для всех рассматриваемых положений.
В качестве примера рассмотрим последовательность обработки механической характеристики (индикаторной диаграммы) двухтактного одноцилиндрового двигателя внутреннего сгорания (рис. 3.4).
Р0 |
12 0 |
|
|
ВМТ |
|
|
P, МПа |
|
|
11 |
|
1 |
|
Сжатие |
|
|
|
|
10 |
|
В |
|
y2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
9 |
|
3 |
Расширение |
|
|
||
|
|
|
|
|
||||
|
8 |
4 |
|
|
|
|
|
|
|
7 |
5 |
|
|
|
|
|
|
|
6 |
|
|
Sв |
НМТ |
|
|
|
|
|
|
|
|
|
|
||
11 |
12 0 |
1 |
|
|
|
|
|
|
10 |
1 |
|
|
2 |
F |
|
МПа |
|
|
|
A |
|
|
|
|||
9 |
O |
|
3 |
|
|
|
мм |
|
|
|
|
|
|
|
|||
8 |
|
|
|
4 |
|
|
|
|
7 |
6 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р и с. 3.4. Обработка механической характеристики |
||||||||
66

Таблица 3.3.
Алгоритм силового расчёта кривошипно-ползунного механизма
Объект
расчёта
Группа Ассура (2 – 3)
Звено 1 (механизм I класса)
Расчётные па- |
Механизмы с горизонтальным движением |
|
|
|
Механизмы с вертикальным движением ползуна. |
|||||||||||||||||||||||||||||||||||||
раметры |
ползуна. Расчётные схемы №1 и 3 по рис. 1 |
|
|
|
|
|
|
|
Расчётные схемы №2 и 4 по рис. 1 |
|||||||||||||||||||||||||||||||||
Силы тяжести, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G1 9,81m1, |
G2 9,81m2 , |
G3 9,81m3 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Силы инерции, |
|
|
|
|
|
x |
|
|
2 , |
|
y |
|
|
|
|
|
|
|
M и2 I S 2 2 , |
Фи3 m3аB |
|
|
|
|
||||||||||||||||||
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
Фи2 m2 xS |
Фи2 m2 yS 2 , |
|
|
|
|
|||||||||||||||||||||||||||||||||
Величины ре- |
|
|
R12x Фиx2 |
Фи3 |
|
Фп.с. , |
|
|
|
|
|
|
|
|
|
y |
|
|
|
G3 |
|
|
|
|
|
y |
|
|
|
|
||||||||||||
акций в кине- |
R12y R12x y A e Фиy2 G2 xS 2 |
|
|
|
|
|
|
|
R12 Фи3 |
|
|
Фп.с. Фи2 G2 , |
||||||||||||||||||||||||||||||
матических па- |
xB |
|
|
|
R12x |
G2 Фy |
|
xS 2 |
e Фиx2 yB |
yS 2 |
||||||||||||||||||||||||||||||||
рах, Н |
Фиx2 yS 2 |
e M и2 xA xB , |
|
|
|
|
|
|
|
R |
y |
x A |
|
и2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
R03 G3 R12y Фиy2 G2 |
|
|
|
|
|
|
e M и2 yB y A , |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R03 Фи2 R12 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R x |
|
R x |
Фx |
, |
R y |
|
R y |
|
Фy G |
2 |
, |
|
R |
Rx 2 |
R y 2 |
, |
R |
|
R x 2 |
R y 2 |
|||||||||||||||||||||
|
32 |
|
|
12 |
и2 |
|
32 |
|
|
|
12 |
|
|
и2 |
|
|
|
|
|
12 |
|
|
|
12 |
|
|
12 |
|
32 |
|
32 |
|
|
32 |
|
|||||||
Направление |
|
|
cos |
R12 |
Rx |
R |
, |
|
sin |
R12 |
R y |
R |
, |
|
|
cos |
R32 |
Rx |
|
R |
, |
|
sin |
R32 |
R y |
R |
|
|
||||||||||||||
реакций |
|
|
|
|
12 |
12 |
|
|
|
|
|
12 |
12 |
|
|
|
|
|
|
32 |
|
32 |
|
|
|
32 |
|
32 |
|
|||||||||||||
Уравновеши- |
R x |
R x , |
R y |
R y |
|
, |
F |
y |
|
R21y xA |
R21x yA |
, |
F x |
F |
y |
sin , |
F y F |
y |
cos |
|||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
вающая сила, Н |
21 |
|
|
12 |
21 |
|
12 |
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
y |
|
|
|
|
|
1 |
|
|
y |
|
1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Величина и на- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rx |
Rx |
F x |
, |
|
|
Ry G Ry |
F y , |
R |
|
|
|
Rx 2 |
Ry 2 |
|
|
|
|
|
|
||||||||||||||||||
правление ре- |
|
|
|
|
|
|
01 |
|
21 |
|
y |
|
|
|
01 |
1 |
|
|
|
21 |
|
|
y |
01 |
|
|
01 |
|
01 |
|
|
|
|
|
|
|
|
|||||
акций, Н |
|
|
|
|
|
|
|
|
|
cos R01 R01x |
R01; |
|
sin R01 |
R01y |
|
R01 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Уравнове- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M y Fyl1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
шивающий |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
момент, Н∙м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
67
Силой, действующей на поршень машины, является сила давления газа, об-
разующегося при сгорании паров топлива в камере сгорания. Зависимость давления рi на поршень от его перемещения представлена в виде индикаторной диа-
граммы рi=f(S).
В начале такта расширения взорвавшаяся в цилиндре рабочая смесь переме-
щает поршень из верхней «мертвой» точки (в. м. т.) в нижнюю (н. м. т.). В конце такта расширения открываются выпускные клапаны и продувочные окна и про-
дукты сгорания удаляются из цилиндра в выхлопную систему. После продувки цилиндров (рi=0) начинается второй такт – сжатие воздуха , заканчивается взрывом вспрыснутого в цилиндр топлива. Полный цикл работы совершается за полный оборот кривошипа.
Для обработки индикаторную диаграмму следует построить с таким же масштабом перемещения s, в каком представлен план положений механизма, и
расположить таким образом, чтобы положение «мертвых» точек на ней было аналогично расположению этих точек на плане положений. Тогда стрелки над
линиями диаграммы, совпадающие с направлением движения поршня (ползуна), укажут, на какой ветви графика следует измерять ординаты для вычисления дав-
ления рi в данном положении.
Давление рi (МПа) определяется путем измерения соответствующей ординаты Yi
в мм на диаграмме с учетом масштабного коэффициента р МПа/мм: рi= p Yi .
Движущая сила, действующая на поршень Fд(i), Н, будет равна
Fд(i)= p |
|
D2 |
, |
(3.1) |
|
i 4 |
|||||
|
|
|
|||
где D – диаметр поршня, мм.
В результате обработки механической характеристики определяются значе-
ния движущей силы или силы полезного сопротивления для всех 12 положений механизма. При этом следует учитывать, что знаки сил должны соответствовать принятой правой системе координат.
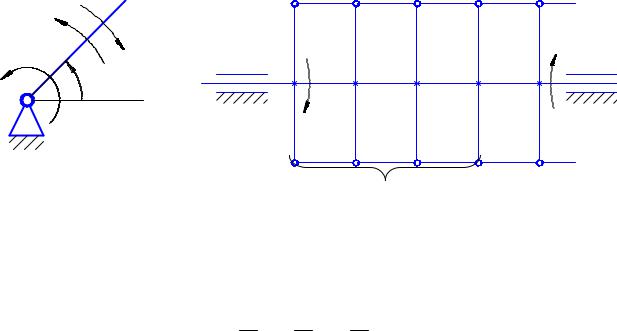
Динамическое исследование машинного агрегата
В курсовой работе рассматриваются машинные агрегаты двух типов: рабочие машины (см. рис. 3.5 а) и машины-двигатели (см. рис. 3.5 б).
При работе машины происходят колебания угловой скорости кривошипного вала, вызванные несовпадением законов изменения сил сопротивления и движущих сил в каждый момент времени, а также непостоянством приведенного мо-
мента инерции звеньев кривошипно-ползунного и некоторых вспомогательных механизмов. Для учета влияния названных причин на закон движения вала кри-
68
вошипа составляется упрощенная динамическая модель машинного агрегата в ви-
де вращающегося звена приведения ( рис.3.6 а).
Электро- |
|
Передаточный |
|
|
Исполнительный |
||||||||||
двигатель |
|
механизм |
|
|
механизм |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Мпр |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
S( 1 ) |
|
|
m |
|
|
|
|
д |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
Мд |
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||
|
Jдв. |
Jи.м. |
|
|
|
|
|
|
|
Jкр |
|
||||
|
|
|
|
|
Входное |
|
|
Выходное |
|
||||||
|
|
|
|
|
звено И.М. |
|
|
|
звено И.М. |
||||||
|
а) |
|
|
|
Кулачков. |
|
|
|
|
|
|
||||
|
|
|
|
рычажн. и др. |
|
|
|
|
|
|
|||||
Вспомогательный механизм
Двигатель внутреннего сгорания
Мпр
m S( 1 )
Jкр
б)
Передаточный
механизм |
|
|
|
И.М. |
|||
|
|
|
|
|
|
Ми.м. |
|
UIи.м. |
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
и.м. |
|
|
||||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Jп.м. и.м.
Jи.м.
 Кулачков.
Кулачков.  рычажн. и др.
рычажн. и др.
Вспомогательный механизм
Р и с. 3.5. Схемы машинных агрегатов
69
|
|
а) |
|
б) |
|
Мдпр |
J |
пр |
Jпрдв Jпмпр |
JМпр Jкр |
Jрычпр |
|
|
|
|
||
|
Мспр |
|
|
|
|
|
|
|
|
Мспр |
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мдпр |
|
|
JIпр=const |
JIIпр=var |
Р и с. 3.6. Динамическая модель машинного агрегата |
|
Звено приведения, в качестве которого обычно принимается |
кривошип, обла- |
дает приведенным моментом инерции Jпр и находится под действием приведен- |
|
ного момента сил Мпр , причем М пр М пр М прс , Мпр- приведенный момент
движущих сил; Мcпр - приведенный момент сил сопротивления.
Приведенный момент инерции можно, в свою очередь, представить в виде
суммы постоянной J пр и переменной J пр составляющих. В величину J пр входят моменты инерции вращающих узлов агрегата: собственный момент инерции
кривошипа J кр, приведенные моменты инерции ротора электродвигателя Jдвпр ,
момент инерции добавочной массы (маховика) J мпр и передаточного механизма
Jnпрм (рис. 3.6 б). Переменная составляющая J пр обусловлена рычажным меха-
низмом, каждое звено которого имеет собственный переменный момент инерции,
зависящий от положения механизма.
Основными задачами динамического исследования машинного агрегата на стадии установившегося движения являются:
- определение момента инерции дополнительной массы (маховика) J мпр , необ-
ходимой для обеспечения требуемой степени неравномерности вращения звена приведения в установившемся режиме, задаваемой коэффициентом неравномер-
ности движения ; - определение закономерности вращения ( 1, 1) звена приведения для любых
положении механизма внутри периода установившегося движения.
70