

пособие тмм умо
.pdfmп2 lп2 (m2 Jas2 m3 J ab ) . |
(2.51) |
Для помещения центра масс в точку О устанавливаем второй противовес на |
|
кривошип |
|
mп1 lп1 m1 OS1 (m2 m3 mП2 ) ОА . |
(2.52) |
mn2
ln2 А
S2
О |
В |
mn1 ln1
Р и с . 2.20. Статическое уравновешивание механизма
Для вращающихся роторов уравновешивание ( балансировка) является необходимой технологической операцией. Ротор – тело любой геометрической формы,
которое при вращении удерживается своими несущими поверхностями в опорах (подшипниками). Ось ротора – прямая, соединяющая центры поперечных сечений несущих поверхностей ротора.
Неуравновешенность ротора – состояние ротора, характеризующееся таким распределением масс, при котором в опорах возникает знакопеременная нагрузка. Виды неуравновешенностей: статическая, моментная, динамическая.
Статическая неуравновешенность – это состояние ротора, при котором ось ротора и его центральная ось инерции параллельны, т.е. центр масс ротора сме-
щен от его оси на величину ест статическое, что вызывает возникновение силы
инерции Фи meст 2 . Величину неуравновешенности ротора оценивают главным вектором статического дисбаланса Dст meст (рис. 2.21.).
Ротор |
Главная центральная |
|
Dсm |
ось инерции |
|
Ось вращения |
||
|
||
ротора |
|
|
eст |
|
|
eк |
=const |
|
Рама |
||
|
mк |
Dк |
Р и с . 2.21. Статическая неуравновешенность ротора
31

Для устранения статической неуравновешенности по линии действия Dст ус- |
||||
танавливают корректирующую массу mk |
на расстояние ek от оси вращения. Эта |
|||
корректирующая масса создает дисбаланс Dk mek . Для статического уравнове- |
||||
шивания необходимо, чтобы Dk Dст , при этом можно задаться величиной mk и |
||||
определить ek , или задаться ek и найти mk . В результате уравновешивания главная |
||||
центральная ось инерции должна совпасть с осью вращения. |
||||
Моментная неуравновешенность характеризуется тем, что центр масс ротора |
||||
расположен на оси его вращения, главная центральная ось инерции повернута от- |
||||
носительно оси вращения на некоторый угол. |
|
|||
Моментная неуравновешенность проявляется только при вращении ротора, в |
||||
виде биения в опорах, при этом возникает динамический момент М Д DД l Д . Для |
||||
устранения моментной неуравновешенности выбирают в произвольном месте две |
||||
корректирующие плоскости. Выберем их так, чтобы одна проходила через опору |
||||
А, другая – через опору В Dk |
mek |
в обоих плоскостях M К lК DК (рис. 2.22). |
||
|
|
DД |
Ротор |
DК |
Главная центральная |
|
m |
|
mк |
ось инерции |
|
|
eк |
|
|
|
S |
|
|
|
|
|
|
|
Ось вращения |
eк |
lд |
m |
=const |
|
|
|
||
ротора |
mк |
|
|
|
DК |
|
DД |
|
|
Рама |
|
|
|
|
|
|
lД |
|
|
Рис. 2.22. Моментная неуравновешенность ротора |
||||
Для моментного уравновешивания необходимо, чтобы M k M Д . Таким об-
разом, для устранения моментной неуравновешенности необходимо иметь две корректирующие массы, которые размещают в 2-х корректирующих плоскостях.
Динамическая неуравновешенность является общим случаем неуравнове-
шенности ротора, а именно, имеет место как статическая, так и моментная неуравновешенности. При этом центр масс ротора не лежит на оси вращения, и
главная центральная ось инерции повернута на угол относительно оси вращения.
32
|
|
|
|
|
|
|
|
|
|
|
|
|
Dст meст |
|
(2.53) |
||||
|
|
|
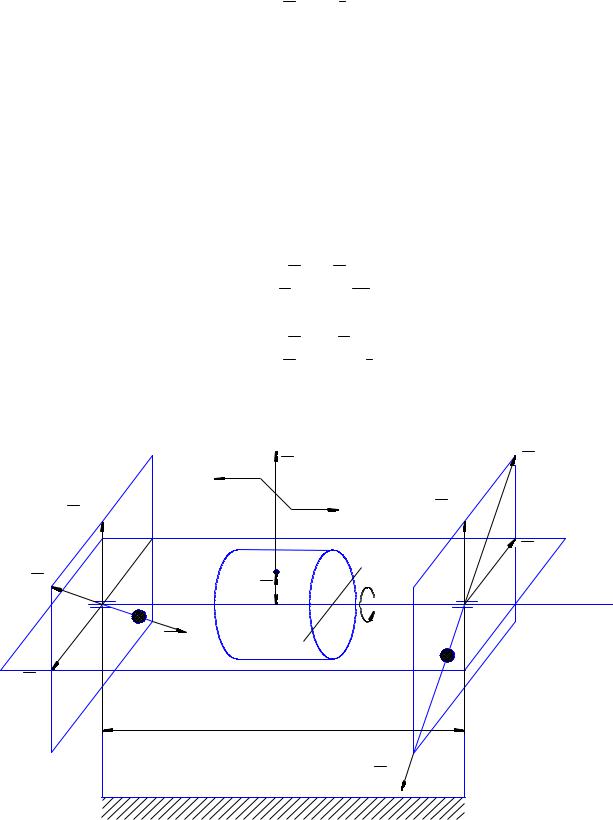
Выберем в произвольном месте две корректирующие плоскости (опоры А и В |
||||||||||||||||
рис. |
2.23). Вектор |
дисбаланса |
разнесем по этим |
плоскостям так, |
чтобы |
||||||||||||||
|
|
СТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
D СТ D СТ . |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Динамический момент представим в виде пары сил |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Д11 ; |
|
|
Д |
|
Д lД ; |
l Д lАВ . |
(2.54) |
|
|
|
|
|
|
|
|
D |
Д1 |
D |
|
М |
D |
||||||
|
|
|
Уравновешивание осуществляется в каждой плоскости отдельно. В 1-ой |
||||||||||||||||
плоскости находим результирующий вектор дисбаланса. Для уравновешивания D1 |
|||||||||||||||||||
необходимо на линии его действия установить корректирующую массу mk1 |
на |
||||||||||||||||||
расстоянии ek1 так, чтобы она создавала дисбаланс корректирующей массы в 1-ой плоскости
|
|
D1 Dk1 |
(2.55) |
Во 2-ой плоскости |
Dk1 mk1 ek1 |
(2.56) |
|
|
(2.57) |
||
|
|
D11 Dk11 |
|
|
|
Dk11 mk11 ek11 |
(2.58) |
|
|
Dст |
DII |
|
DсmI |
МД |
DсmII |
|
|
||
|
|
|
DДII |
DI |
A |
e |
B |
|
mкI |
=const mкII |
|
|
DкI |
||
DДI |
|
|
|
|
|
IД |
|
|
|
DкII |
|
|
Р и с . 2.23. Динамическая неуравновешенность ротора |
||
Динамическая неуравновешенность устраняется путем установки двух корректирующих масс в двух корректирующих плоскостях. При этом дисбаланс кор-
ректирующих масс в 1-ой и во 2-ой плоскостях неравные и непараллельные.
33

Перечень вопросов по данной теме:
1.Что является целью виброзащиты машины?
2.Чем регламентируются допустимые механические воздействия на человека?
3.Как влияют вибрационные воздействия на технические объекты?
4.Перечислить основные методы виброзащиты.
5.Что называется статической неуравновешенностью ротора?
6.Какой ротор является статически уравновешенным?
7.Что является моментной неуравновешенностью ротора?
8.Что является динамической неуравновешенностью ротора?
Полностью материал по данной теме изложен в учебниках [1] стр.248-296
2.6. Лекция № 6. Проектирование зубчатых передач
Высшая кинематическая пара, образуемая последовательно взаимодействующими поверхностями зубьев, называется зубчатым зацеплением. Синтез заце-
пления состоит в отыскании геометрического сопряжения поверхностей по заданному закону их относительного движения.
Теорема Виллиса. Для обеспечения постоянного передаточного отношения угловых скоростей U21= 2/ 1, сопрягаемые поверхности должны иметь общую нормаль и проекции скоростей на нее должны совпадать. Существует множество кривых высших порядков отвечающих требованию теоремы Виллиса, в частно-
сти, эвольвентное зубчатое зацепление.
Основные преимущества эвольвентного зацепления: простота проектирова-
ния и изготовления, технологичность, взаимозаменяемость, автоматизация массового производства. Эвольвента – это кривая, образуемая точкой прямой, которая катится по окружности без скольжения. Радиус этой окружности называется основным и обозначается rb.
Свойства эвольвенты:
1.Единственным параметром является радиус основной окружности.
2.Нормаль к эвольвенте является касательной к основной окружности
3.ac bc (рис. 2.24).
ac=rb( + ); bc=rbtg ; соответственно + =tg ; =tg - =inv - эвольвентная функция (инволюта). Эта функция используется для определения профиля зубьев.
34

θ



















 α
α
τ





 b
b
а










 с
с
Rв |
τ |
Р и с. 2.24. Свойства эвольвенты
Геометрия прямозубого эвольвентного нулевого колеса
Вводим понятие делительной окружности. Это окружность стандартного ша-
га Р, по которой расстояние между соседними зубьями равно шагу инструмента. Радиус делительной окружности обозначается – r, модуль зацепления – m.
rB=r.cos20 ; P= .m.
Если z – число зубьев колеса, то r=mz/2.
Высота зуба - h = ra-rf , где ra – радиус окружности вершин; rf – радиус окружности впадин.
Высота головки зуба – ra-r=ha, ha
Высота ножки зуба – rf-r=hf, hf
h=ha+hb; ha=ha*.m; hf=hf*.m; ha*=1; hf*=1,25,
где ha* - коэффициент высоты головок; hf* - коэффициент высоты ножки.
Все размеры зубчатого колеса и зуба определяются модулем m. Форма зуба определяется радиусом основной окружности rb.
Методы нарезания зубчатых колес
Метод копирования. Инструмент имеет профиль, соответствующий впадине между двумя зубьями. Этот метод является неточным, поскольку он связан с точностью станка и геометрией инструмента. В то же время он наиболее экономичен
(применим в массовом производстве – протяжка, волочение, точное литье). Метод обкатки. Имитируется зацепление двух колес. При этом необходимы три движения: 1. Резания; 2. Подачи – приближение заготовки к инструменту; 3. Обкатки – совместное движение инструмента и заготовки. Если представить, что ра-
диус инструментального колеса приближается к бесконечности, то получим инструментальную рейку (рис. 2.25).
35

|
Р=πm |
|
|
πm/2 |
πm/2 |
|
ca |
P0=0,38m |
|
|
|
c*m |
|
ym |
|
|
|
h*am |
хm |
S |
|
|
|
h*am |
|
S |
|
|
|
c*m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
P0=0,38m |
|
r |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x 0; S m/2 |
x=0; S= m/2 |
|
|
||||||||||||||||
Делительная
прямая
S |
хm |
|
r
x 0; S m/2
Р и с . 2.25. Инструментальная рейка, где c*m – радиальный зазор; хm –смещение инструмента; ym – укорочение зуба, нарезанного со смещением по отношению к нулевому.
Подрезание зубьев. При числе зубьев менее 17 инструмент подрезает ножку зуба, так что толщина ножки становится меньше толщины зуба по основной окружности. Для корректировки используют смещение инструмента на величину x.m, где х – коэффициент смещения. На рисунке 2.25 представлено нарезание отрицательного, нулевого и положительного зубчатых колес.
Проектирование беззазорного зацепления.
Нулевое зацепление при х1=х2=0 и частный случай – равносмещенное зацепление при х1=-х2 межосевое расстояние a=r1+r2=m.(z1+z2)/2, стандартный
угол зацепления =20 .
Корригированное зацепление (х1+х2=х 0).
rw1, rw2 –начальные окружности. Это воображаемые центроиды, которые катятся
друг по другу без скольжения. При х >0, w>20 , aw>a; |
х <0, w<20 , aw<a. |
Основное условие сборки двух корригированных зубчатых колес – отсутст- |
|
вие бокового зазора. |
|
Sw1+Sw2=Pw=mw. . |
(2.59) |
Sw – толщина зубьев по начальной окружности; |
|
mw – модуль по начальной окружности. |
|
Pw=2 .rw1/z1=2 .rw2/z2; mw=2.rw1/z1=2.rw2/z2; |
(2.60) |
36
|
|
ra1 |
|
|
|
rw1 |
|
|
|
r1 |
|
|
|
rв1 |
|
|
τ1 |
rf1 |
|
M |
|
|
|
|
B |
|
|
|
|
A |
|
|
τ2 |
N |
|
|
rf2 |
|
|
|
rв2 |
|
|
|
r2 |
|
|
|
rw2 |
|
|
|
ra2 |
|
|
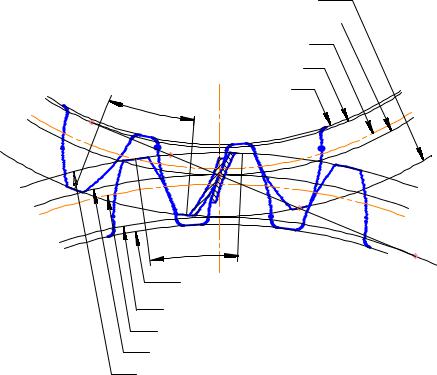
Р и с . 2.26. Зацепление двух колес |
|
||
Толщины зубьев по делительной окружности: |
|
||
S1= m/2+2x1mtg20 ; S2= m/2+2x2mtg20 ; |
(2.61) |
||
При нарезании колес со смещением толщина зубьев по начальной окружно- |
|||
сти определяется таким образом, когда S1 и S2 известны. |
|
||
Используя свойства эвольвенты, получаем |
|
||
=tg - =inv ; w=tg w- w=inv w; =S/2r; w=S/2rw; |
(2.62) |
||
+ = w+ w; |
Sw=rw[s/r+2(inv -inv w)]. |
(2.63) |
|
Учитывая, что inv w=inv20 +2.tg 20 .(x1+x2)/(z1+z2), |
(2.64) |
||
получаем rw1=mz1/2.cos20 /cos w; rw2=mz2/2.cos20 /cos w; |
(2.65) |
||
|
aw=m(z1+z2)/2. cos20 /cos w. |
(2.66) |
|
Последнюю формулу удобно представить в виде aw=a+ym, где y – коэффициент воспринимаемого смещения. Радиусы окружностей впадин определяются при ус-
ловии, что инструментальная рейка входит внутрь от делительной окружности на величину m(1,25 –х).
rf1=m(z1-2,5+2x1)/2; rf2=m(z2-2,5+2x2)/2.
Радиусы окружности вершин получаются из условий получения радиального зазора 0,25m: ra1=aw-rf2-0,25m; ra2=aw-rf1-0,25m. Коэффициент уравнительного смещения – y=x1+x2-y.
37

θw ψw
θψ
Sw
S
rв
r rw
Р и с. 2.27 Параметры зуба
Соответственно ra1=r1+m(1+x1- y); ra2=r2+m(1+x2- y), а y.m – указывает, насколь-
ко высота корригированного колеса меньше нулевого.
Качественные показатели зубчатого зацепления:
1. Коэффициент перекрытия. Характеризует плавность передачи и показыва-
ет, сколько пар зубьев одновременно находится в зацеплении 2> >1,1. Коэффици-
ент перекрытия есть отношение дуги зацепления к шагу. Дуга зацепления – это путь по делительной окружности, который проходит зуб во время контакта с со-
пряженным. Цифра после запятой указывает процентное время зацепления двух пар зубьев.
2.Коэффициент удельного скольжения. Является одним из основных параметров, определяющих износ зубчатой пары, который пропорционален работе трения (произведению напряжения на скорость скольжения).
3.Коэффициент удельного давления. Характеризует контактные напряжения.
Перечень вопросов по данной теме:
1.Какие окружности являются центроидами в относительном движении колес?
38
2.Какой параметр определяет основные геометрические размеры зуба и зуб-
чатого колеса?
3.Что означает величина "X" в выражении: X = 1,25 m?
4.По какой окружности нормального зубчатого колеса толщина зуба равна ширине впадины?
5.Чему равен стандартный коэффициент радиального зазора для нормальной цилиндрической зубчатой передачи при модуле m >1 мм?
6.Какие участки сопряженных профилей зубьев передачи внешнего зацепления более всего подвержены износу?
7.Что представляет собой геометрическое место точек зацепления сопряженных профилей?
8.Что такое эвольвента?
9.При каком числе зубьев колеса, нарезанного инструментальной рейкой, бу-
дет наблюдаться подрез ножки зуба (ha* = 1, α = 20°)? 10.Какой параметр зубчатого колеса обозначен буквой Р?
11.Какой параметр зуба нормального зубчатого колеса численно равен модулю?
12.Какой параметр зуба нормального зубчатого колеса численно равен 2,25 m? 13.Какой параметр нормального зубчатого колеса равен половине шага?
14.Какой окружности не существует у отдельно взятого колеса?
15.Чему равен модуль нормального зубчато колеса, если Z = 18, da = 100мм.?
16.Чему равно максимальное значение коэффициента перекрытия прямозубой цилиндрической передачи внешнего зацепления?
17.Какой способ изготовления зубчатых колес обеспечивает наибольшую точность?
18.Какой инструмент не применяют для образования профилей зубьев по методу обкатки?
19.Какой инструмент применяют для образования профилей зубьев по методу копирования?
20.На каких станках производится нарезание зубьев методом обкатки с помощью инструментальной рейки?
21.Какая окружность не изменяется при нарезании колеса со смещением? 22.У какого колеса с внешними зубьями толщина зуба по делительной окруж-
ности больше ширины впадины?
23.Чему равна высота зуба инструментальной рейки?
24.В какой передаче начальные окружности совпадают с делительными? 25.В какой передаче межосевое расстояние сохраняет свое теоретическое зна-
чение (т.е. совпадает с делительным межосевым расстоянием)?
39

26.Какой инструмент применяют для нарезания колес с внутренними зубьями?
27.При каком зацеплении суммарный коэффициент смещения равен нулю? 28.Какой способ изготовления зубчатых колес обеспечивает наибольшую точ-
ность и производительность?
29.По какой прямой на рейке толщина зуба равна ширине впадины?
30.Какой участок зуба инструментальной рейки формирует эвольвентный профиль зуба колеса?
31.Схема нарезания какого колеса показана на рисунке?
32.Как влияет коэффициент смещения на изгибную прочность зубьев колеса с внешними зубьями?
33.Чему равно предельно минимальное число зубьев колеса при нарезании его инструмнтом реечного типа, у которого отсутствует подрез ножки зу-
ба(ha*=1, α=20°)?
34.Чему равен суммарный коэффициент смещения в положительной передаче?
Полностью материал по данной теме изложен в учебниках [1] стр.248-296
2.7. Лекция №7. Кинематика зубчатого зацепления
Кинематика одноступенчатых передч
|
|
|
z2 |
|
|
z2 |
|
z1 |
|
о2 |
о2 |
|
|
|
|
о |
1 |
|
|
2 |
|||
|
|
|
|
z1 |
|
||
1 |
|
|
2 |
1 |
о1 |
|
|
|
|
|
|
|
|
|
|
Р и с. 2.28. Одноступенчатые передачи
Передаточное число одноступенчатой зубчатой передачи U Z2 / Z1 , а переда-
точное отношение U12 1 / 2 . Каждая внешняя передача реверсирует, или изме-
няет направление вращения. При больших передаточных отношениях применяют многоступенчатые передачи. Зубчатые механизмы, в которых происходит уменьшение угловой скорости, называют редукторами, а увеличение – мультипликато-
рами. Коробками скоростей называют механизмы, допускающие ступенчатое изменение величины передаточного отношения. Вариаторами называют механизмы,
позволяющие бесступенчато изменять передаточное отношение. Стоит заметить, что у вариатора присутствует элемент проскальзывания, который зависит от ве-
личины крутящего момента.
40