


page 254
Door Open |
Seat Belt |
Key |
Ignition
20.5.3 Motor Forward/Reverse
• Design a motor controller that has a forward and a reverse button. The motor forward and reverse outputs will only be on when one of the buttons is pushed. When both buttons are pushed the motor will not work.
20.6 PRACTICE PROBLEMS
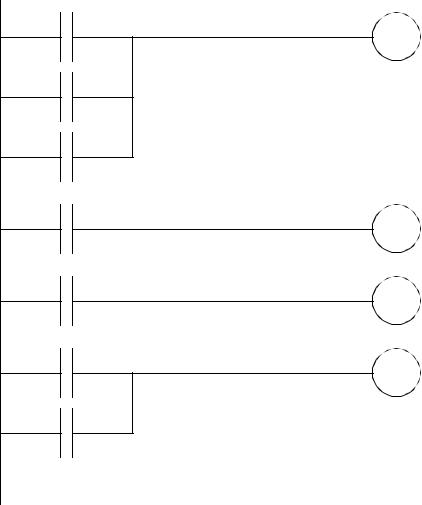
1. Draw a ladder diagram that will cause output D to go true when switch A and switch B are closed or when switch C is closed. The devices are wired to the following locations.
Input A is 001
Input B is 002
Input C is 003
Output D is 201

page 255
ANS.
001 |
|
|
|
002 |
|
|
|
201 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
003
2. Draw a ladder diagram that will cause output D to be on when push button A is on, or either B or C are on.
Input A is 001
Input B is 002
Input C is 003
Output D is 201
ANS. |
002 |
003 |
201
002 003
001
4. Make a simple ladder logic program that will turn on the outputs with the binary patterns when the corresponding buttons are pushed. Assume that the outputs are from 200 to 207 and that 200 is the LSB)
11011011 (input 101)
10101010 (input 102)
10010010 (input 103)
page 257
A |
B |
C |
D |
Z |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
a)find a Boolean algebra expression using a Karnaugh map.
b)draw a ladder diagram using the truth table (not the Boolean expression).

page 258
ANS. |
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
AB |
|
|
AB |
|
AB |
|
|
|
|
|
|
|
|||||||
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
0 |
|
0 |
|
|
1 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z=B*(C+D)+ABCD |
|
|
|
|
|
|
|
|
1 |
|
0 |
|
0 |
|
|
1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
CD |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
||||
|
CD |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
0 |
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
CD |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
Z |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8. Simplify the Boolean expression below.
( ( A B) + ( B + A) ) C + ( B C + B C)
ans. =C
9. Given the Boolean expression a) draw a digital circuit and b) a ladder diagram (do not sim-

page 259
plify).
X = A B C + ( C + B)
ans. |
X = |
B |
( A C + |
C |
) |
10. a) Construct a truth table for the following problem.
i)there are three buttons A, B, C.
ii)the output is on if any two buttons are pushed.
iii)if C is pressed the output will always turn on. b) Develop a Boolean expression.
c) Develop a Boolean expression using a Karnaugh map.
ans. |
A |
B |
C |
out |
|
|
|
|
C + A B |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
AB |
AB |
|
AB |
|||||||||
|
0 |
1 |
1 |
1 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
0 |
0 |
0 |
|
C |
1 |
1 |
|
|
1 |
|
1 |
||||
|
1 |
0 |
1 |
1 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
1 |
0 |
1 |
|
|
|
1 |
0 |
|
|
0 |
|
0 |
|||
|
|
C |
|
|
|
||||||||||||
|
1 |
1 |
1 |
1 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11. a) Given the following truth table, show the Boolean combinations that would give a result of 1.

page 260
A |
B |
C |
D |
Result |
|
|
|
|
|
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
b)Write the results in a) in a Boolean equation.
c)Simplify the Boolean equation in b)
ANS.
ABCD + ABCD + ABCD + ABCD + ABCD + ABCD + ABCD + ABCD
A ( BCD + BCD + BCD + BCD) + A ( BCD + BCD + BCD + BCD)
A ( BCD) + A ( BCD) + BCD + BCD + BCD
B ( ACD + ACD) + BCD + CD ( B + B)
B ( ACD + ACD) + BCD + CD
12. Develop the simplest Boolean expression for the Karnaugh map below,
a)graphically.
b)by Boolean Algebra
page 261
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
|
AB |
AB |
|
AB |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
1 |
|
|
|
|
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
||
CD |
|
|
|
|||||||||
ANS.
DA + ACD
ABCD + ABCD + ABCD + ABCD + ABCD + ABCD
ACD + ACD + ACD
AD + ACD
13. Setup the Karnaugh map for the truth table below.
A |
B |
C |
D |
Result |
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |


page 263
b)OR
c)both a) and b)
d)none of the above
(ans. a)
16.Simplify the following Boolean equations,
a)( A + B) ( A + B)
ans. |
|
( A + |
|
) = ( |
|
|
|
|
|
|
|
B |
AB) ( AB) = 0 |
||||||||
( A + B) |
||||||||||
b)ABCD + ABCD + ABCD + ABCD
|
ans. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ABCD + |
|
ABCD + ABCD |
|
= BCD + ABD |
|
= B( CD + AD) |
|||||||||||||||||||||||||||
|
|
|
+ ABCD |
|||||||||||||||||||||||||||||||
17. |
Simplify the following boolean equations |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
A( B + AB) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
|
|
|
) |
|
|||||||||||
|
a) |
|
|
|
|
|
|
|
|
|
|
|
|
|
b) |
B + AB |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
( B + AB) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
) |
|||||||||
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
||||||||||||||||
|
c) |
|
|
|
|
|
|
|
|
|
|
|
|
|
d) |
|
B + AB |
|||||||||||||||||
18. |
Convert the following ladder logic to a karnaugh map. |
|||||||||||||||||||||||||||||||||
|
|
|
|
A |
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
A |
|
|
|
X |
||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
page 264
ans. A |
B |
C |
D |
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
0 |
0 |
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
CD |
CD |
CD |
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
0 |
0 |
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
0 |
1 |
|
|
0 |
|
|
0 |
||||||||||||||
0 |
0 |
1 |
0 |
|
0 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0 |
0 |
1 |
1 |
|
0 |
|
|
|
|
|
|
0 |
1 |
|
|
0 |
|
|
0 |
|||||
|
|
AB |
|
|
|
|
||||||||||||||||||
0 |
1 |
0 |
0 |
|
0 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0 |
1 |
0 |
1 |
|
0 |
|
|
|
|
|
|
0 |
0 |
|
|
0 |
|
|
0 |
|||||
|
|
AB |
|
|
|
|
||||||||||||||||||
0 |
1 |
1 |
0 |
|
1 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0 |
1 |
1 |
1 |
|
1 |
|
|
|
|
|
|
1 |
1 |
|
|
0 |
|
|
0 |
|||||
|
|
AB |
||||||||||||||||||||||
1 |
0 |
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
0 |
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
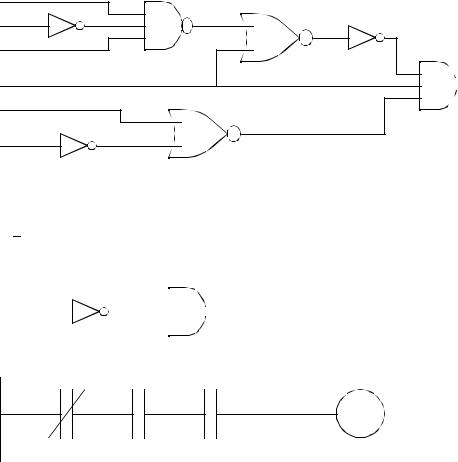
19. Simplify the following and implement the original and simplified equations with gates and ladder logic.
|
A + ( |
B |
+ |
C |
+ |
|
D |
) ( B + |
C |
) + A B ( |
C |
+ |
D |
) |
|
|
|
|
|
|
|
|||||||||||||||||||||||
ans. |
A + ( |
|
|
|
+ |
|
|
+ |
|
|
|
) ( B + |
|
|
) + A B ( |
|
+ |
|
) |
|
|
|
|
|
|
|
||||||||||||||||||
B |
C |
D |
C |
C |
D |
|||||||||||||||||||||||||||||||||||||||
|
A ( 1 + B ( |
|
|
+ |
|
|
) ) + ( |
|
+ |
|
+ |
|
) B + ( |
|
+ |
|
+ |
|
) |
|
|
|||||||||||||||||||||||
|
C |
D |
B |
C |
D |
B |
C |
D |
C |
|||||||||||||||||||||||||||||||||||
|
A + ( |
|
|
|
+ |
|
) B + |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
C |
D |
C |
|||||||||||||||||||||||||||||||||||||||||
|
A + |
|
|
B + |
|
|
B + |
|
|
|||||||||||||||||||||||||||||||||||
|
C |
D |
C |
|||||||||||||||||||||||||||||||||||||||||
|
A + |
|
B + |
|
|
|||||||||||||||||||||||||||||||||||||||
|
D |
C |
||||||||||||||||||||||||||||||||||||||||||
page 265
ans.
A + D B + C |
A |
B |
C |
D |
B |
C |
C |
D |
A |
B |
D |
B |
A |
C |
page 266
|
A |
|
B |
|
B |
C |
|
C |
|
|
|
D |
|
|
C |
A |
B |
D |
|
|
|
A |
|
|
D |
|
|
B |
|
|
C |
|
27. Short answer
a) Write the simplest Boolean equation for the karnaugh map below,
|
|
|
|
|
CD |
CD |
CD |
CD |
|
|
|
|
|
||||
AB |
1 |
0 |
0 |
1 |
||||
|
|
|
|
|
|
|
|
|
AB |
0 |
0 |
0 |
0 |
||||
|
|
|
|
|
|
|
|
|
AB |
0 |
0 |
0 |
0 |
||||
|
|
|
|
|
|
|
|
|
AB |
0 |
1 |
1 |
0 |
||||
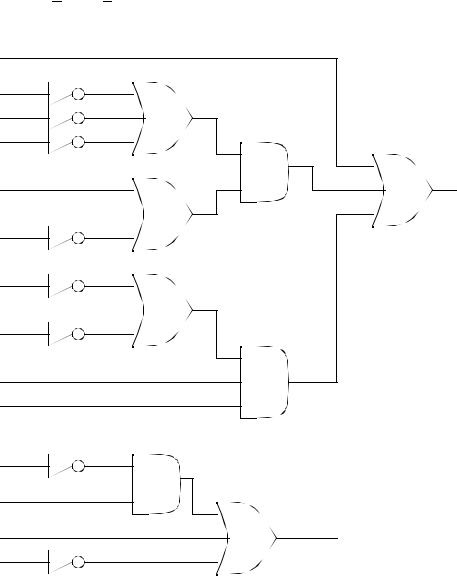
28. Given a system that is described with the following equation,

page 267
X= A + ( B ( A + C) + C) + A B ( D + E)
a)Simplify the equation using Boolean Algebra.
b)Implement the original and then the simplified equation with a digital circuit.
c)Implement the original and then the simplified equation in ladder logic.
d)Implement the simplified equation in a Basic Stamp program. Assume the inputs and outputs are on pins A=1, B=2, C=3, D=4, E=5, X=6)
ans. |
a) |
X = A + ( B ( A + C) + C) + A B ( D + E) |
|
|
X = A + ( B A + B C + C) + A B D + A B E |
|
|
X = A ( 1 + B D + B E) + B A + C ( B + 1) |
|
|
X = A + B A + C |
ans. |
b) |
ABCD E |
|
|
X |
|
|
X |

page 268
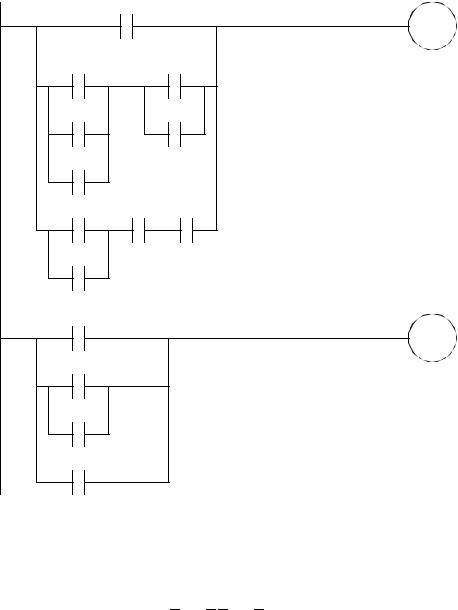
X
ans. c) |
A |
BA
C
C
A |
|
|
|
B |
|
|
|
D |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
A |
X |
|
|
B |
A |
C |
|
ans. |
d) |
input 1 ‘input A |
|
|
input 2 ‘input B |
|
|
input 3 ‘input C |
|
|
input 4 ‘input D |
|
|
input 5 ‘input E |
|
|
output 6 ‘output X |
|
|
loop: |
|
|
low 6 |
|
|
if (in1=1) or (in2=1 or in1=0) or (in3=1) then on |
|
|
goto loop |
|
|
on: |
|
|
high 6 |
|
|
goto loop |
29. Given the truth table below find the most efficient ladder logic to implement it. Use a structured technique such as Boolean algebra or Karnaugh maps.


page 270
30. For the following Boolean equation,
X= A + B( A + CB + DAC) + ABCD
a)Write out the logic for the unsimplified equation.
b)Simplify the equation.
c)Write out the ladder logic for the simplified equation.
31. Use a karnaugh map to simplify the following truth table, and implement it in ladder logic.
A |
B |
C |
D |
X |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
32. Convert the following Boolean equation to the simplest possible ladder logic.
X = A ( A + A B)