

Литература / Фалк_Арменский_ЭлектромеханическиеУстройстваАвтоматики_2002
.pdf–21–
z1, z2′ и zm, можно по схеме замещения проводить расчет основных величин и характеристик - токов, напряжений, мощности, КПД и коэффициента мощности.
Несколько слов следует добавить о сопротивлении zm=Rm+jxm,которое называют сопротивлением намагничивающего контура схемы замещения. Действительная часть Rm - это условное активное сопротивление, на котором выделяется мощность, равная магнитным потерям, т.е. Rm= Pм/I02. Мнимая часть xm - это индуктивное сопротивление взаимоиндукции обмоток приведенного трансформатора.
§1.3. Основные характеристики трансформатора Внешние характеристики. Внешняя характеристика – это за-
висимость напряжения на выводах трансформатора от тока, протекающего через нагрузку, подключенную к этим выводам, т.е. зависимость U2=f(I2) при U1=const. При изменении нагрузки (тока I2) вторичное напряжение трансформатора изменяется. Это объясняется (см. 1.27) изменением падения напряжения на сопротивлении вторичной обмотки I2′z2 и изменением ЭДС E2′=E1 за счет изменения падения напряжения на сопротивлении первичной обмотки.
Причем, поскольку уравнения (1.27) векторные, U2 зависит как от значения нагрузки, так и ее характера: активного, индуктивного или емкостного. Значение нагрузки в трансформаторах определяют коэффициентом нагрузки:
Kн=I2/I2ном≈I1/I1ном, |
(1.30) |
характер нагрузки – углом ϕ2 сдвига по фазе вторичных напряжения и тока. Точный расчет внешней характеристики можно выполнить по схеме замещения (рис. 1.6), изменяя zн и определяя U2 и I2. Однако на практике
часто пользуются формулой
U2= U20(1- |
u/100), |
(1.31) |
где U20 - вторичное напряжение при холостом ходе; U2 -вторичное |
||
напряжение при данной |
нагрузке; a |
u - изменение вторичного |
напряжения, т.е. арифметическая разность между напряжением х.х. и напряжением при данной нагрузке в процентах от напряжения х.х.
Значение u рассчитывают по упрощенному выражению, которое можно получить из схемы замещения трансформатора при определенных допущениях:
u=Kн(uкаcosϕ2+uкрsinϕ2). (1.32)
Входящие в выражение (1.32) величины uка и uкр - это активная и реактивная составляющие напряжения короткого замыкания (к.з.) uк. Напряжение uк определяется как отношение напряжения Uк, при котором проводится опыт к.з., к номинальному напряжению U1ном в процентах. В
–22–
опыте к.з. вторичную обмотку трансформатора замыкают накоротко (zн=0), а к первичной подводят такое пониженное напряжение Uк, при котором по обмоткам токи протекают номинальные. В опыте к.з. напряжение питания уравновешивается в основном падением напряжения в обмотках, и величину Uк можно рассматривать как эквивалентное падение напряжения в обмотках при номинальном токе нагрузки. В силовых трансформаторах и трансформаторах питания малой мощности значение uк составляет 5-15%, причем большие значения относятся к трансформаторам меньшей мощности. Конкретные значения uк приводятся в соответствующих каталогах. Значения uка и uкр либо определяются экспериментально в опыте к.з., либо рассчитываются через параметры схемы замещения.
u ка = I1ном(R1 +R2′) 100%
U1ном
(1.33)
u кр= I1ном(X1 + X2′) 100%
U1ном
Рис. 1.7
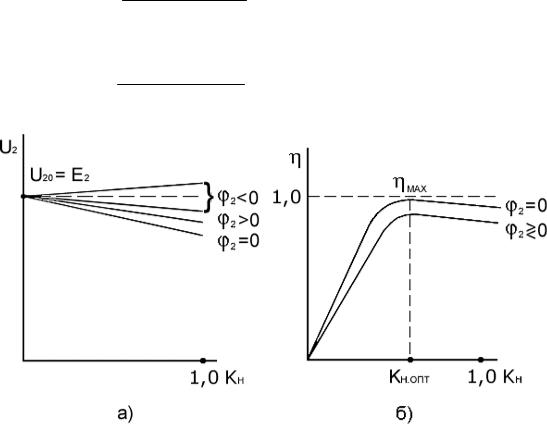
Внешние характеристики, построенные по (1.З1) и (1.32), представлены на рис. 1.7,a. Как видно, характеристики линейные и жесткие. Жесткость характеристик, т.е. слабая зависимость функции (U2) от аргумента (Kн), объясняется тем, что сопротивление обмоток невелико (uк≈5-15%), а основной магнитный поток мало зависит от нагрузки. При активной (ϕ2=0) и активно-индуктивной (ϕ2>0) нагрузке характеристики всегда падающие, при активно-емкостной (ϕ2<0) нагрузке могут быть возрастающими (в формуле (1.32) член uкрsinϕ2 становится отрицательным). В трансформаторах
–23–
небольшой мощности активное падение напряжения обычно больше, чем индуктивное, и характеристика при активной нагрузке менее жесткая, чем при активно-индуктивной (рис. 1.7,а). В трансформаторах большой мощности соотношение падений напряжения противоположное и характеристика при активной нагрузке будет более жесткой.
Коэффициент полезного действия. КПД трансформатора называется отношение отдаваемой (полезной) электрической мощности P2 к потребляемой P1 :
η=P2/P1. |
|
|
|
(1.34) |
||
Мощность P1 обычно представляют в виде суммы мощности P2 и потерь в |
||||||
трансформаторе: |
P2 |
|
|
|
|
|
η= |
|
|
|
. |
(1.35) |
|
P2 |
+ Pэ |
+ |
|
|||
|
Pм |
|
||||
Активная мощность P2=S2cosϕ2, где S2 – полная мощность. Поскольку выходное напряжение трансформатора слабо зависит от нагрузки, то
коэффициент нагрузки (см. (1.30)) Kн=I2/I2ном≈S2/Sном, где Sном - номинальное значение полной мощности; тогда P2=KнSномcosϕ2.
Электрические потери при произвольной нагрузке (см.1.10) можно выразить через коэффициент нагрузки и потери при номинальной нагрузке Pэ=Kн2 Pэном. Потери Pэном с достаточной степенью точности равны мощности Pк, потребляемой трансформатором в опыте к.з. ; магнитные потери Pм - мощности P0, потребляемой трансформатором в режиме х.х. Значения Pк и P0 приводятся в соответствующих стандартах и каталогах. С учетом вышеизложенного формула (1.35) принимает вид
η = |
|
|
KнSномcosϕ2 |
|
|
||||
K |
S |
ном |
cosϕ |
2 |
+ P |
+ K |
2P |
|
|
|
н |
|
|
0 |
н |
к . |
|||
На рис. 1.7,б приведены графики зависимости КПД от нагрузки. При Kн=0 отдаваемая мощность P2 и КПД равны нулю. С ростом Kн возрастает мощность P2 при неизменном значении магнитных потерь (мощности P0) и КПД весьма быстро увеличивается. При некотором значении Kн.опт. КПД достигает максимума и затем начинает медленно уменьшаться. Причиной уменьшения КПД является увеличение электрических потерь, изменяющихся пропорционально квадрату тока, т.е. Kн2. Максимальное значение КПД мощных трансформаторов достигает 0,98-0,99, у трансформаторов мощностью в единицы В А снижается до 0,6.
Трансформаторы обычно проектируют так, чтобы оптимальный коэффициент нагрузки, при котором КПД достигает максимума, Kн.опт.≈0,5-- 0,7. При этом наиболее вероятному диапазону нагрузки трансформатора Kн=0,5–1 соответствует КПД, близкий к максимальному.
При уменьшении cosϕ2 КПД снижается, т.к. уменьшается отдаваемая мощность P2 при неизменных электрических и магнитных потерях.
–24–
Номинальный режим работы трансформаторов устанавливается обычно по условиям нагрева и безаварийной работы в течение заданного периода эксплуатации. Важнейшим показателем номинального режима является номинальная мощность – мощность, отдавая которую трансформатор может длительно работать, не перегреваясь выше установленной нормы.
–25–
ГЛАВА 2. АСИНХРОННЫЕ МАШИНЫ
Асинхронной машиной называется машина переменного тока, у которой угловая скорость ротора не равна угловой скорости магнитного поля статора. Угловая скорость ротора зависит от нагрузки, в режиме двигателя нагрузкой является механический момент сопротивления на валу машины, в режиме генератора – электрическая мощность, отдаваемая приемнику энергии.
У асинхронных машин большой, средней и малой мощности на статоре практически всегда расположена трехфазная обмотка, т.е. обмотка, состоящая из трех отдельных электрических цепей, сдвинутых в пространстве на 120 °. Ротор у трехфазных машин либо короткозамкнутый типа "беличьей клетки", либо с контактными кольцами. Асинхронные микромашины для автоматических систем выпускаются в основном с двухфазной обмоткой статора со сдвигом обмоток фаз на 90°; ротор таких двигателей типа "беличьей клетки" или полый немагнитный, или ферромагнитный. Принцип работы асинхронных машин связан с понятием вращающегося магнитного поля.
§2.1. Вращающееся магнитное поле машины переменного тока
Обмотка, создающая вращающееся поле, представляет собой m-
фазную систему, т.е. состоит из m обмоток, которые сдвинуты друг относительно друга в пространстве и по которым протекают токи, сдвинутые во времени. Каждая из обмоток фаз создает пульсирующий поток (неподвижный в пространстве и изменяющийся во времени), сдвинутый относительно других в пространстве и во времени. Если все обмотки фаз имеют одинаковое число витков и сдвинуты в пространстве на электрический угол γэ = 2π/m (электрический угол – это пространственный угол, умноженный на число пар полюсов рм ), токи имеют одинаковую амплитуду Im и частоту f и сдвинуты во времени на угол β = 2π/m, то результирующее магнитное поле будет круговым. Это означает, что поток представляет собой вектор постоянной длины, вращающийся в пространстве с постоянной угловой скоростью. Конец этого вектора описывает окружность, его значение Ф= (m/2) Фм, где Фм - амплитудное значение потока обмотки фазы. Условия

–26–
γэ=2π / m ; β = 2π / m ; Im1 = I m2 =... = Imm (2.1)
называют условиями кругового поля в m - фазной машине.
В электрических машинах переменного тока для создания вращающегося поля используются в основном трехфазные (рис. 2.1.,а) и двухфазные (рис.2.1.,б)обмотки.
Рис. 2.1
При этом в качестве двухфазной обмотки используется половина четырехфазной, поэтому условия кругового поля в двухфазной обмотке совпадают с четырехфазной, но значение вектора результирующего поля вдвое меньше.
Процесс образования кругового вращающегося поля в трехфазной машине, для которой условия (2.1) принимают вид
γ э = 120 0 ; β = 120 0; Im1 |
= Im2 = Im3 |
(2.2) |
можно пояснить графически на |
примере машины |
с одной парой |
полюсов(рис.2.2). |
|
|

–27–
Рис. 2.2
Мгновенные значения потока Ф обмоток фаз изменяются по закону изменения токов (рис. 2.2,а). Каждый из потоков можно представить вектором, направление которого совпадает с осью обмотки фазы. Берем мгновенные значения потоков в различные моменты времени, откладываем по соответствующим пространственным осям (рис. 2.2,б) и в каждый момент времени строим результирующий поток Ф. Нетрудно убедиться, что в любой момент времени поток Ф = (3/2 ) Фм и за один период изменения тока он поворачивается на один оборот.
В многополюсной машине (рм > 1 ), частота ЭДС, наводимой в обмотке вращающимся магнитным полем, пропорциональна не только угловой скорости поля, но и числу пар полюсов. Одному обороту соответствует рм период изменения ЭДС. Чтобы привести в соответствие пространственный и временной углы, вводят понятие электрического угла, равного пространственному, умноженному на число пар полюсов:
γэ = γ рм. Таким образом, вся окружность машины соответствует электрическому углу 360°рм

–28–
Следовательно, в многополюсной машине за один период тока поле повернется на угол, соответствующий одной паре полюсов, а полный геометрический оборот поле завершит за рм периодов тока. Угловая скорость магнитного поля, называемая синхронной скоростью машины переменного тока, будет равна (рад/с)
ω1 = 2πf / рм, |
(2.3) |
т.е. угловая скорость магнитного поля прямо пропорциональна частоте тока и обратно пропорциональна числу пар полюсов обмотки. Синхронная частота вращения (об/мин) n1 = 60 f / рм.
Если изменить порядок чередования любых двух обмоток фаз, то вектор магнитного поля будет вращаться в противоположную сторону. Следует отметить, что когда говорят о круговом вращающемся магнитном поле машины, то имеют в виду пространственную волну индукции, создаваемую в воздушном зазоре и вращающуюся в угловой скоростью ω1. Для двухфазной машины условия кругового поля (2.1) принимают вид:
γ э =90° ; β = 90° ; Iм1 = Iм2 ; |
(2.4) |
и вращающийся вектор поля Ф = Ф м Электрическую машину и режим ее работы, подчиняющиеся
условиям (2.1), называют симметричными. При отклонении углов γэ и β или соотношения амплитуд токов от условий (2.1) магнитное поле становится эллиптическим и режимы называют несимметричными.
§ 2.2. Конструкция и принцип действия трехфазных асинхронных машин
Рис. 2.3
Конструкция. На рис. 2.3 представлена конструктивная схема трехфазной машины с короткозамкнутым ротором типа "беличьей клетки". Внутри корпуса 1, отлитого из стали, чугуна или сплавов алюминия, закреплен неявнополюсный магнитопровод статора 2, набранный из листовой электротехнической стали толщиной 0,35-0,5 мм. Листы штампуются с
–29–
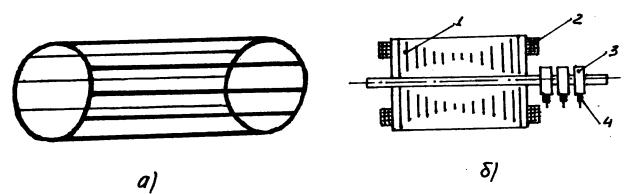
пазовыми отверстиями и в собранном магнитопроводе на внутренней поверхности образуются пазы для укладки обмотки. Трехфазная обмотка статора 3 обычно выполняется распределенной, т.е. состоит из отдельных катушек, расположенных в пазах вдоль всей окружности статора. У трехфазной обмотки на внешнюю панель выводов либо выходят все 6 выводов, либо обмотки фаз соединяются внутри машины по схеме “звезда” или “треугольник” и на панель выходят 3 вывода. Обмотка статора предназначена для создания вращающегося магнитного поля машины. Магнитопровод ротора 4 выполняется в виде цилиндра, набранного из листовой электротехнической стали с пазами на внешней поверхности. Обмотка ротора 5 типа "беличьей клетки" состоит из неизолированных алюминиевых или медных стержней, расположенных в пазах и замкнутых накоротко с торцов двумя кольцами (рис. 2.4,а). Наиболее часто "беличью клетку" с кольцами получают путем заливки алюминия под давлением в пазы ротора.
Рис. 2.4
Асинхронные машины с контактными кольцами отличаются от машин с короткозамкнутым ротором тем, что в пазах ротора 1 (рис. 2.4,б) располагается трехфазная распределенная обмотка 2, соединенная “звездой”. Три вывода обмотки подводятся к трем контактным кольцам 3, расположенным на валу ротора и изолированным друг от друга и от вала; контактные кольца изготавливаются из сплавов меди. По поверхности колец скользят щетки 4, выполненные из композиционных материалов на основе графита, расположенные в щеткодержателях, укрепленных на статоре. Скользящий контакт кольца-щетки позволяет подавать или снимать напряжение с вращающейся обмотки ротора, включать в цепь ротора добавочное сопротивление.
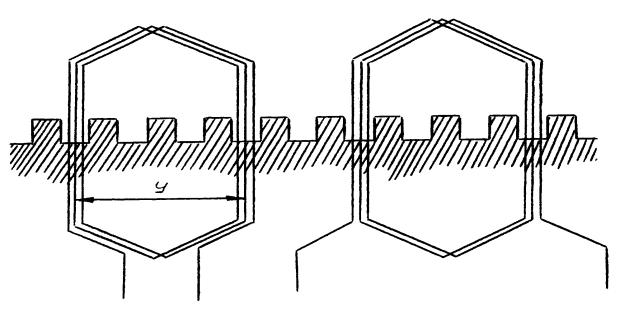
Распределенная обмотка статора. Простейшим конструктивным элементом распределенной обмотки является катушка(рис.2.5).
В распределенной обмотке в общем случае магнитные оси катушек не совпадают с результирующей магнитной осью обмотки. Катушка состоит из одного или нескольких последовательно соединенных витков, изготовленных из круглого или прямоугольного медного провода.
–30–
Расстояние между сторонами катушки (витка) называется шагом катушки по пазам y и примерно равно полюсному делению τ.
|
|
а) |
б) |
|
Рис. 2.5 |
Полюсным делением называется часть окружности ротора приходящаяся
на один полюс: τ = πD / 2рм,
где D - диаметр ротора, рм - число пар полюсов машины.
При y = τ шаг называется диаметральным, при y < τ - укороченным. Изолированные катушки укладываются в пазы в два слоя; таким образом, если одна сторона катушки находится под северным полюсом в верхнем слое паза, то другая сторона -под южном полюсом в нижнем слое паза.
Такое расположение обеспечивает одинаковое (по контуру) направление ЭДС в обеих сторонах катушки и одинаковое направление моментов сил, действующих на обе стороны катушки.
Катушки объединяются в группы, каждая из которых образует отдельную электрическую цепь – обмотку фазы.