

Литература / Фалк_Арменский_ЭлектромеханическиеУстройстваАвтоматики_2002
.pdf–91–
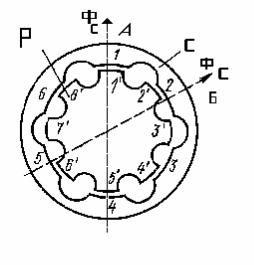
Рис. 3.8
Ротор состоит из двух основных частей: постоянных магнитов 1, создающих магнитный поток возбуждения и обеспечивающих возникновение электромагнитного момента в синхронном режиме; короткозамкнутой пусковой обмотки типа "беличьей клетки" 2, уложенной в магнитопровод из электротехнической стали 3.
Принцип действия двигателей с постоянными магнитами такой же, как и двигателей с электромагнитным возбуждением (см. § 3.1). В реальных синхронных микродвигателях с постоянными магнитами магнитная система несимметрична и Xd≠Xq. Это наглядно выражено у микродвигателей радиальной конструкции (рис.3.8, а), в которых магнитное сопротивление ротора по продольной оси d больше, чем по поперечной q, вследствие малой магнитной проницаемости материала постоянных магнитов I по сравнению с электротехнической сталью 2. Электромагнитный момент в первом приближении может быть рассчитан по формуле (3.10). Однако, поскольку активное сопротивление обмотки статора синхронных микродвигателей соизмеримо с индуктивными сопротивлениями, в реальных микродвигателях зависимость Мэм=f(θ) более сложная.
У синхронных микродвигателей с постоянными магнитами применяют асинхронный метод пуска. Особенность пуска заключается в том, что он происходит при наличии потока возбуждения ротора. Этот поток при вращении ротора создает тормозной момент, направленный встречно к асинхронному вращающему моменту. На результирующей зависимости момента двигателя от угловой скорости ротора появляются провалы, которые могут ухудшить условия пуска.

–92–
Реактивные микродвигатели. Синхронными реактивными называют микродвигатели с переменным вдоль окружности воздушного зазора магнитным сопротивлением (Xd≠Xq) и невозбужденным ротором. Вращающееся магнитное поле таких микродвигателей создается только МДС статора.
Рис 3.9
Изменение магнитного сопротивления вдоль окружности воздушного зазора двигателя осуществляют путем выбора соответствующей формы и материала ротора. Роторы, схематически изображенные на рис.3.9, а, б, отличаются от обычного короткозамкнутого ротора типа "беличьей клетки" асинхронного микродвигателя только наличием внешних открытых (явнополюсная конструкция, рис.3.9, а) или внутренних (неявнополюсная конструкция, рис.3.9, б) пазов, которые обеспечивают изменение магнитного сопротивления вдоль окружности. У гладкого цилиндрического ротора, показанного на рис.3.9, в, такой же эффект получают за счет выполнения его из двух разнородных по магнитным свойствам материалам (алюминия 1 и стали 2).
Принцип действия реактивного микродвигателя рассмотрим на статической модели (рис.3.10).

–93–
Рис. 3.10
Вращающееся поле статора заменим постоянным магнитом. Угол между осью потока (МДС) статора и продольной осью d ротора обозначим
γ.
На рис.3.10, а показано положение ротора в том случае, когда угол γ=0. Магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются. Электромагнитные силы притяжения ротора к статору Fэм имеют только нормальные составляющие, и электромагнитный момент равен нулю. Ротор занимает положение устойчивого равновесия. Если под действием внешнего момента Мвн принудительно повернуть ротор на угол γ по часовой стрелке (рис.3.10, б), то магнитные силовые линии изогнутся. У сил появляются тангенциальные составляющие Ft, которые создают реактивный вращающий момент Мр, стремящийся повернуть ротор в исходное положение.
При повороте ротора на 900 (рис.3.10, в) силовые линии поля будут вновь проходить прямолинейно, не изгибаясь, но магнитное сопротивление в этом случае больше, чем при γ=0. Реактивный момент Мр=0, т.е. ротор находится в равновесии. Однако, если при γ=0 равновесие устойчивое, то при γ=900 равновесие неустойчивое, и достаточно малейшего возмущения, чтобы ротор вернулся в устойчивое положение максимальной магнитной проводимости, показанное на рис.3.10,а или

–94–
отличающееся от него на 1800. Положение устойчивого равновесия ротора будет при γ=0, 1800 и неустойчивого – при γ= 900, 2700.
Таким образом, реактивный момент изменяется по закону Мр=Мр max sin2γ и всегда стремится установить ротор в положение минимального магнитного сопротивления на пути потока двигателя. Обмотки статора двигателя создают вращающееся магнитное поле, и ротор увлекается реактивным моментом вслед за полем и вращается со скоростью поля.
Рассмотрение конструкции и принципа действия синхронного реактивного двигателя позволяет сделать вывод о том, что он является частным случаем явнополюсного синхронного двигателя с электромагнитным возбуждением при Uв=0. Основным электромагнитным моментом реактивного двигателя является дополнительная реактивная составляющая двигателя с возбужденным ротором, определяемая выражением (3.12) (γ≈θ). Угловая характеристика Мр=f(θ), соответствующая уравнению (3.12), изображена на рис.3.5 пунктирной линией. Угловая характеристика микродвигателей, имеющих относительно большое активное сопротивление обмотки статора, несколько отличается от рассчитанной по (3.12).
У синхронных реактивных микродвигателей применяют асинхронный метод пуска. В качестве пусковой служит либо обмотка типа "беличьей клетки" (рис.3.9, а, б), либо алюминиевые части ротора (рис. 3.9,в), играющие роль обмотки.
Гистерезисные микродвигатели. Синхронным гистерезисным называют микродвигатель, вращающий момент которого возникает за счет явления гистерезиса при перемагничивании ротора.
Ротор гистерезисного двигателя делают сборным (рис.3.11):
Рис 3.11
1 - кольцо из магнитотвердого материала, 2 - немагнитная или магнитная втулка, 3 - вал. Для изготовления кольца I используются материалы типа викаллой и альни с широкой петлей намагничивания (гистерезиса). Потери мощности на гистерезис в кольце определяют значение гистерезисного вращающегося момента.

–95–
Для выяснения природы гистерезисного момента рассмотрим физические процессы, происходящие в магнитотвердом роторе при асинхронном вращении, когда материал ротора непрерывно перемагничивается (рис.3.12).
Рис. 3.12
В момент времени, когда вектор вращающегося магнитного потока статора Ф1 занимает положение А (рис.3,12, а), элементарные магнитики ротора ориентируются вдоль этого потока. Силы взаимодействия элементарных магнитиков, например М1 и М2, с потоком статора Fэм направлены вдоль этого потока и вращающего момента не создают. При перемещении потока статора в положение Б в том же направлении будут поворачиваться и элементарные магнитики (рис.3.12,б). Однако вследствие явления гистерезиса магнитики не повернутся на тот же угол, что и поток Ф1, и между ними образуется угол γ - угол гистерезисного запаздывания. При этом силы Fэм будут иметь тангенциальные составляющие Ft, которые и создадут гистерезисный момент асинхронного режима Мга. Возникающий гистерезисный момент пропорционален модулю векторного произведения пространственных векторов магнитного потока ротора Ф2, образованного элементарными магнитиками, и МДС статора F1, которые вращаются с одинаковой скоростью со сдвигом на угол γг :
Мга = К F1 Ф2 sinγг, |
(3.I3) |
где К - конструктивный коэффициент.
Значения F1 и Ф2 при симметричном, например, трехфазном питании от угловой скорости ротора не зависят. Угол γг также не зависит от угловой скорости ротора и определяется коэрцитивной силой материала ротора. Чем больше коэрцитивная сила, тем сильнее должно изменяться

–96–
внешнее поле, прежде чем начнет изменяться направление поля элементарных магнитиков. Соответственно не зависит от угловой скорости ротора и значение вращающего гистерезисного момента Мга.
Механическая характеристика идеального микродвигателя Мга=f(ω2) показана на рис.3.13 сплошной линией; как видно, характеристика абсолютно жесткая.
Рис 3.13
У реальных гистерезисных микродвигателей механическая характеристика не абсолютно жесткая. Объясняется это либо появлением дополнительных составляющих момента в двигателе, например асинхронного момента Мвихр взаимодействия вихревых токов в роторе с потоком Ф1, либо изменением самого момента Мга в результате изменения формы поля Ф1, например при конденсаторной схеме включения. Зависи-
–97–
мость результирующего электромагнитного момента Мэм для первого случая показана на рис.3.13 штрих-пунктирной линией.
В синхронном режиме магнитное поле статора и ротор вращаются с одинаковой угловой скоростью и перемагничивания материала ротора не происходит. Магнитный поток ротора Ф2ост сохраняется вследствие остаточного магнетизма и вращается вместе с ротором с синхронной угловой скоростью.
Поток тем больше, чем выше значение остаточной индукции материала ротора. Микродвигатель работает как обычный синхронный микродвигатель с постоянными магнитами на роторе. Отличие только в том, что угол γ отставания оси потока ротора, принимаемый за его продольную ось, от МДС статора не может превысить угла гистерезисного запаздывания γг, так как в противном случае начинается перемагничивание ротора. Следовательно, наибольшее значение момента Мгс, развиваемое гистерезисным двигателем в синхронном режиме, равно Мга. При моменте сопротивления на валу, превышающем Мга, двигатель выходит из синхронизма. У гистерезисных микродвигателей угол γг – обычно не превышает 200-250.
Увеличение гистерезисного момента возможно за счет выполнения ротора из материала с петлей намагничивания, имеющей наибольшие значения коэрцитивной силы и остаточной индукции. Идеальным был бы материал ротора с широкой прямоугольной петлей намагничивания, материалы типа викаллой и альни весьма близки к этому идеалу.
Режим работы гистерезисного двигателя зависит от значения и характера статического момента сопротивления Мст на валу ротора (см. рис.3.13). Если во всем диапазоне угловой скорости ротора ω2 от 0 до ω1 момент сопротивления (пунктирная прямая I) меньше гистерезисного момента Мга, то двигатель работает в синхронном режиме (точка В). Ось потока ротора отстает от оси потока статора на угол γ, при котором Мгc = Мст. Если момент сопротивления меняется по прямой 2, то равновесие моментов наступит при угловой скорости ω2А, соответствующей точке А, т.е. двигатель будет работать в асинхронном режиме (Мга = Мст). Однако использование гистерезисных микродвигателей в асинхронном режиме неэкономично вследствие больших потерь на перемагничивание ротора, особенно при больших скольжениях.
Гистерезисные микродвигатели обладают рядом ценных качеств. Они развивают большой пусковой момент Мп = Мга (см. рис.3.13). Ротор двигателя входит в синхронизм плавно, без рывков благодаря практически постоянному значению гистерезисного момента весь период разгона. Потребляемый двигателем ток незначительно (на 20-30%) изменяется при изменении режима работы от пуска до холостого хода, что позволяет эффективно использовать гистерезисные двигатели в повторно-

–98–
кратковременном режиме. Гистерезисные микродвигатели просты по конструкции и надежны в эксплуатации.
У синхронных микродвигателей регулирование угловой скорости ротора производится путем изменения синхронной скорости поля статора за счет регулирования частоты напряжения питания. При неизменной частоте напряжения средняя угловая скорость ротора сохраняется постоянной. Однако, мгновенная угловая скорость ротора может колебаться в пределах одного оборота относительно средней угловой скорости, этот процесс иногда называют качанием ротора синхронного двигателя. Для пояснения этого явления рассмотрим работу синхронного микродвигателя, ротор которого вращается с постоянной средней угловой скоростью ω2=ω1, при изменении момента сопротивления (рис. 3.14).
Рис.3.14
У всех синхронных микродвигателей электромагнитный момент Мэм является функцией угла γ между осью потока статора и продольной осью ротора. При моменте сопротивления на валу Мст.1 продольная ось ротора смещена относительно оси потока статора Ф1 на некоторый угол γ1, при котором Мэм=Мст1. В случае уменьшения момента сопротивления (Мст.2<Мст1) момент двигателя станет больше момента сопротивления, мгновенная угловая скорость ротора несколько возрастет (+Δω2) и продольная ось ротора приблизится к оси потока статора - угол γ уменьшается. Моменту сопротивления Мст2 соответствует новое положение ротора γ2, при котором Мэм = Мст2. Однако вследствие момента инерции ротор не займет сразу положение γ2, а проскочит его, и продольная ось ротора приблизится к оси статора на угол γ2’< γ2. При этом Мэм < Мст2 и мгновенная угловая скорость ротора начнет уменьшаться ( - Δω2), а угол γ увеличивается вплоть до γ2”> γ2. Это значит, что ротор будет
–99–
некоторое время колебаться около углового положения γ2 и его мгновенная угловая скорость будет меняться. Так как ротор вращается не равномерно, то действительное угловое положение вала в данный момент времени отличается от расчетного, что может вызвать погрешность при работе двигателя в прецизионных преобразовательных устройствах. В общем случае неравномерность вращения ротора может вызываться как внешними факторами, так и переменными электромагнитными и механическими силами в самом двигателе.
Наиболее высокие энергетические показатели (КПД η и коэффициент мощности cosϕ) и наименьшую массу на единицу номинальной мощности имеют микродвигатели с постоянными магнитами. При частоте напряжения питания 50 Гц в диапазоне мощностей 10÷100 Вт η=40÷80% (меньшие значения относятся к двигателям меньшей мощности). Затем идут гистерезисные микродвигатели, режим которых соответствует работе синхронной машины с недовозбуждением, так как поток ротора является вторичным, наведенным магнитным потоком статора. При тех же условиях их η=30÷50%. Наихудшие показатели имеют реактивные микродвигатели, у которых поток возбуждения ротора вообще отсутствует (η=20÷40%). Следует отметить, что коэффициент мощности существенно зависит от схемы включения двигателя: при однофазной с конденсатором он, естественно, выше, чем при трехфазной.
Из рассмотренных синхронных микродвигателей наиболее простые по конструкции и технологии изготовления и сравнительно дешевые в производстве реактивные микродвигатели, которые выполняют из недорогих магнитомягких материалов.
§ 3.3. Синхронные микродвигатели непрерывного вращенияс пониженной угловой скоростью ротора
Синхронные микродвигатели классического типа, рассмотренные в § 3.2, при стандартной частоте напряжения питания 50-1000 Гц развивают частоту вращения ротора порядка 1 тыс. об/мин и более, а в электрических микроприводах часто требуется частота вращения только в несколько единиц или десятков оборотов в минуту. Применение для снижения частоты вращения механических редукторов со столь значительным передаточным отношением усложняет систему микропривода, снижает общую надежность, повышает уровень звуковых шумов, габариты и массу. Кроме того, в условиях вакуума или высоких температур, надежность микродвигателей, имеющих быстро вращающиеся подшипники, резко падает.
В синхронных микродвигателях, рассматриваемых в настоящем параграфе, угловая скорость ротора не равна, а меньше угловой скорости поля статора в определенное число раз. При этом соотношение угловых скоростей в синхронном режиме не зависит от внешних факторов (момента нагрузки, напряжения и т.д.).
Микродвигатели с пониженной угловой скоростью ротора по системе возбуждения бывают в основном двух типов: реактивные – с
–100–
невозбужденным ротором; индукторные – с подмагничиванием ротора со стороны статора постоянным магнитным потоком.
Редукторные микродвигатели (субсинхронные). В редукторных микродвигателях осуществляется электромагнитное редуцирование угловой скорости ротора по отношению к угловой скорости первой гармоники поля статора. Это достигается путем использования в качестве рабочих не первой, а высших, зубцовых гармоник магнитного поля, которые усиливаются за счет определенной конфигурации поверхностей статора и ротора. Как отмечалось в § 2.2, число полюсов поля высшей пространственной гармоники пропорционально, а угловая скорость обратно пропорциональна ее порядку.
Особенность конструкции и принципа действия синхронных редукторных микродвигателей наиболее удобно рассмотреть на примере машины реактивного типа (рис.3.15).
Рис. 3.15
Статор и ротор набирают из листов электротехнической стали. Статор С выполняется в виде кольца и имеет пазы на внутренней поверхности; ротор Р – в виде диска и имеет пазы на внешней поверхности. Числа зубцов статора Ζс и ротора Ζр различны; причем обычно Ζр > Ζс. На статоре укладывается обмотка с числом пар полюсов Ρм, предназначенная для питания от трехфазной или однофазной сети и создающая вращающееся магнитное поле.
Пусть в данный момент времени поток Φс занимает положение А и против статорных зубцов 1 и 4 находятся роторные зубцы 1′ и 5′. Реактивный момент равен нулю, так как ротор обеспечивает наибольшую магнитную проводимость. При перемещении потока Φс в положение Б, т.е. на угол 360°/Ζс, ротор под действием реактивного момента повернется на такой угол, чтобы магнитная проводимость снова стала наибольшей. Это наступит тогда, когда против зубцов статора 2 и 5 встанут зубцы ротора 2′