

1.5. Программные методы контроля
1. Контроль правильности ввода информации. Производится путем контрольного суммирования вводимых в запоминающем устройстве (ЗУ) кодов, чисел и сравнения сумм кодов с заранее полученным значением (которым снабжается вводимый массив кодов).
2. Контроль с помощью двойных просчетов (для восстановления информации после сбоя). Является распространенным методом. Применяют двукратное повторение вычислений и сравнение результатов.
3. Для контроля правильности выбора метода вычисления, точности и правильности алгоритма, применяют контрольные соотношения, например: sin2 cos2 1 (1.2)
4. Контроль алгоритма. Это метод контроля с применением упрощенного алгоритма. Параллельно с вычислением основного алгоритма делают вычисления для дополнительных исходных данных, с известными результатами обработки.
5. Контроль программы по счетчику времени. Превышение времени решения задачи означает неисправность КТС. (Зацикливание).
6. Контроль с помощью тестовых задач. Тесты устанавливают факт наличия неисправности и выявляют ее характер (сбой, отказ). При этом используются все возможные операции, например: проверка выполнения операций чтения (ЧТ) «0», ЧТ «1», бегущий «0», бегущая «1», запись (ЗП) – ЧТ, «шахматный код» (прямой, обратный). Результаты выполнения тестов сравниваются с эталонными значениями.
2. Статические и динамические характеристики автоматических систем регулирования параметров технологических процессов
2.1. Математическое описание элементов и систем автоматики
Любая система автоматического управления работает в двух режимах: статическом и динамическом. Поведение звена или системы в статическом режиме определяется по статической характеристике, которая может быть получена экспериментально или теоретически. По статической характеристике для каждого значения входной величины звена х можно определить соответствующее установившееся значение выходной величины.
Для удобства систему управления разбивают на так называемые динамические звенья.
Состояние любого динамического звена может быть охарактеризовано совокупностью соответствующих физических величин (скоростей перемещений, напряжений, токов и т. д.). Поскольку размерности этих величин различны, то их представляют обобщенными координатами. Порядок составления дифференциальных уравнений состоит в следующем:
1) определяются входная и выходная величины и действующие на них факторы;
2) выбирается начало отсчета;
3) выявляется и используется основной физический закон, определяющий связь между входной и выходной величинами. В механике, например, это законы Ньютона, в электротехнике - Кирхгофа и т. п.
Математическое описание физического закона связи входной и выходной величин в динамическом состоянии и является исходным дифференциальным уравнением.
Получаемые
уравнения чаще всего оказываются
нелинейными, решить которые аналитическим
путем бывает затруднительно, а иногда
и невозможно. Поэтому на практике
нелинейные уравнения приводят к виду
линейных. При этом надо помнить, что
линеаризации подвергаются только
неразрывные функции (релейные и импульсные
функции линеаризовать нельзя). В основе
линеаризации нелинейных уравнений
лежит предположение, что в исследуемом
динамическом процессе переменные
изменяются так, что их отклонения ![]() от
установившегося значения (х0; y0) остаются
все время достаточно малыми. Для следящих
систем и большинства систем управления
по отклонению это условие выполняется.
от
установившегося значения (х0; y0) остаются
все время достаточно малыми. Для следящих
систем и большинства систем управления
по отклонению это условие выполняется.
Простейший способ линеаризации основан на разложении нелинейной функции в ряд Тейлора с отбрасыванием нелинейных членов ряда.
Линеаризация нелинейного уравнения всегда производится относительно установившегося режима работы звена, который характеризуется постоянством обобщенных координат.
Допустим,
динамика звена описывается нелинейным
уравнением вида ![]()
Раскладывая в ряд Тейлора и ограничиваясь линейными членами ряда, получим

где
![]()
Для установившегося режима работы уравнение запишется так:
![]()
Вычтя из уравнения (1) уравнение установившегося состояния, получим искомое линеаризованное дифференциальное уравнение, описывающее динамику звена при малых отклонениях величин

Такая запись громоздка и неудобна. Поэтому принято линеаризованные уравнения записывать в одной из стандартных форм.
Форма
1. Делят все члены уравнения на коэффициент,
стоящий при меньшем порядке выходной
величины. В данном примере на коэффициент  .
При этом вводятся такие обозначения
.
При этом вводятся такие обозначения
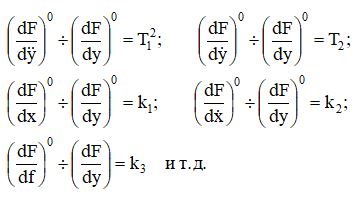
Все вновь полученные коэффициенты при выходной величине называют постоянными времени Т, так как они получают размерность времени, а при входной и других величинах называют коэффициентами передачи по задающему воздействию, по возмущению и т. д. Тогда первая форма записи линеаризованного уравнения будет иметь вид:
![]()
Форма
2. Используя символ операции
дифференцирования ![]() ,
линеаризованное уравнение можно записать
в виде
,
линеаризованное уравнение можно записать
в виде
![]()
или
![]() (4)
(4)
Для сокращения записи символ отклонений D можно опускать, учитывая, что входящие в него переменные линеаризованного уравнения обязательно представляют собой отклонения.