

книги / Скреперы
..pdf3.1. Выбор параметров ковша скрепера
Главным параметром скрепера является геометрическая вместимость ковша qк. К основным параметрам ковша относятся: длина, ширина, высота и угол наклона боковых стенок, радиус и точка подвеса заслонки, угол наклона задней стенки (рис. 2). Форма ковша скрепера должна обеспечивать хорошее заполнение его грунтом с минимальной удельной силой тяги, маневренность скрепера и минимальную материалоемкость. С уменьшением высоты и длины ковша, увеличением ширины удельное сопротивление наполнению снижается.
За основной параметр, от которого зависит длина и ширина ковша, принята высота наполнения. Под высотой наполнения ковша H понимается расстояние от линии стыка ножа ковша с днищем до наиболее высокой точки грунта в ковше, измеренное по вертикали. Высота наполнения ковша изменяется в зависимости от его емкости q:
q, м3 |
3 |
6 |
10 |
15 |
H, м |
1,00–1,13 |
1,25–1,5 |
1,8–2,0 |
2,3 |
Ширина ковша ограничивается допустимыми габаритами грузов |
||||
для железнодорожного состава (ГОСТ 9238—59). |
|
|||
В существующих скреперах отношение |
Bк / Hк = m составляет |
|||
1,40–1,78. С увеличением этого отношения удельное сопротивление (на 1 м3 емкости ковша) в конце наполнения уменьшается. Поэтому рекомендуется принимать m = 2…3.
Максимальная длина ковша Lк, м:
Lк = 2Hϕ к , tg
где φ — угол естественного откоса грунта.
Длина и высота ковша определяются соотношениями:
L = |
α 1 qк |
, H |
|
= |
qк |
, |
|
|
|
||||||
к |
Bк |
к |
|
α 1 Bк |
|
|
|
|
|
|
|
|
|||
где значение коэффициента вариации |
α 1= |
Lк |
принимается по |
||||
|
|||||||
Hк
табл. 3 прил. I.
11
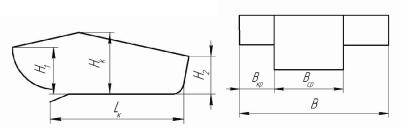
Прочие размеры следует принимать, соблюдая условия Н1 ≥
≥ 0,7 · Нк, Н2 ≥ 0,6 · Нк (см. рис. 2).
Угол наклона плоскости ножа к днищу выбирают таким, чтобы обеспечить требуемое значение угла резания в положении, когда режущая кромка ножа находится в опорной плоскости колес. Рекомендуется принимать угол резания α = 35°.
Предпочтительны ступенчатые ножи, которые конструктивно проще криволинейных, а также облегчают внедрение в грунт и наполнение ковша по сравнению с прямыми ножами. Размеры ступенчатых ножей можно выбирать, использовав следующие соотношения для крайних и средних пластин (рис. 3):
Вкр = 0,25 · В; Вср = 0,5 · В.
Рис.2. Схема ковша скрепера |
Рис.3. Схема ступенчатого ножа скрепера |
3.2.Тяговый расчет скрепера
Вполном цикле работы большинства землеройных машин можно выделить два характерных режима: рабочий и транспортный, которые существенно отличаются один от другого.
Рабочий режим характеризует движение машины в процессе копания грунта, которое осуществляется обычно в тяжелых грунтовых условиях на малых скоростях и связано с преодолением больших сопротивлений, возникающих при взаимодействии рабочих органов с грунтом. Поэтому этот режим может бытьхарактеризован каксиловой.
Рабочий режим неизбежно связан с необходимостью полной реализации тяговых возможностей машины, которые, как правило, ограничиваются условиями сцепления ведущих колес, а не мощностью двигателя.
12

Транспортный режим— работаземлеройныхмашинпритранспортном передвижении. В отличие от рабочего транспортный режим протекает при меньших суммарных сопротивлениях движению, но с повышенной скоростью для достижения максимальной производительности транспортного процесса. Поэтому транспортный режим должен осуществляться при полном использовании мощности двигателя и определяться по балансу мощности машины. Таким образом, если рабочий режим землеройных машин связан с реализацией их тяговых возможностей, тотранспортный— сполнойреализациеймощностидвигателя.
При определении необходимой силы тяги скрепера рассматривается заключительная стадия наполнения ковша.
Тяговое усилие при рабочем режиме скрепера W определяется следующими сопротивлениями (тс) [1]:
W = Wт +Wр +Wн +Wп ,
где Wт — сопротивление перемещению (транспортированию) груженого скрепера;
Wр — сопротивление резанию;
Wн — сопротивление наполнению;
Wn — сопротивление перемещению призмы волочения. Сопротивление перемещению (транспортированию) груженого
скрепера (тс):
Wт = (Gск + Gг )( f ± i),
где Gск — конструктивный вес скрепера, тс;
GГ — сила тяжести грунта в ковше скрепера, тс; f — коэффициент сопротивления передвижению; i — уклон поверхности движения.
Gг = qк γ г kн ,
kр
где qк — геометрическая емкость ковша, м3;
γг — среднийобъемныйвесгрунтавестественномзалегании, тс/м3; kн — коэффициент наполнения ковша грунтом (табл. 4 прил. I); kр — коэффициент разрыхления грунта в ковше скрепера (табл. 5
прил. I). Сопротивление резанию рассчитывается по формулам:
13
для сплошной режущей кромки ножа
Wp = k B h,
для ножа ступенчатой формы
Wp = k ((B − Bср ) hкр + Bср hср ),
где k — удельное сопротивление грунтов резанию, кгс/м2 (кН/м2); h — глубина резания (толщина стружки), м;
B — ширина резания, м;
Bср, hср — ширина и глубина резания среднего ножа, м; hкр — глубина резания крайних ножей, м.
Удельное сопротивление резанию k имеет следующие значе-
ния (кгс/м2): |
5000–7000Wн′′ |
для песков и слабых песчаных грунтов .................. |
|
для супеси и суглинков ............................................ |
8000–10 000 |
для тяжелых суглинков и глин ................................ |
до 12 000 |
Принимать значения k свыше 10 000–12 000 кгс/м2 не рекомендуется, так как более плотные грунты необходимо предварительно разрыхлять.
При выборе толщины стружки h можно руководствоваться данными табл. 6 прил. I.
Полное сопротивление наполнению Wн складывается из сопротивления силе тяжести грунта Wн′ , поступающего в ковш, и сопро-
тивления трению грунта в ковше Wн′′ :
Wн = Wн′ +Wн′′, Wн′ = g b h H γ г,
где b — ширина резания, м; h — толщина стружки, м;
H — высота наполнения ковша, м; γг — объемный вес грунта, тс/м3.
Сопротивление возникает в результате действия боковых призм, располагающихся по обеим сторонам столба грунта при его перемещении в вертикальном направлении внутри ковша:
Wн′′= χ b H 2 g γ г = 2Рµ2 ,
14
где χ — коэффициент трения,
χ = |
|
tgϕ 2 |
|
= |
sinϕ |
2 |
, |
1 |
+ tg2ϕ |
2 |
|
2 |
|
|
|
где φ2 — угол внутреннего трения грунта (табл. 7 прил. I); |
|||||||
µ2 — коэффициент трения грунта о |
грунт (суглинки, пески), |
||||||
µ2 = 0,3…0,5. |
|
|
|
|
|
|
|
Сопротивление перемещению призмы волочения (кгс):
Wп = y b Н2 g γ г µ2 ,
где y — коэффициент объема призмы волочения перед заслонкой и ножами ковша, y = 0,5…0,7 (наибольшее значение относится к сыпучим грунтам).
Тяговый расчет для транспортного положения выполняется с целью установить максимальную возможную скорость движения скрепера, а также подъем, который может преодолеть тягач с груженым или порожним скрепером. В этом случае не исключено, что для передвижения груженого и даже порожнего скрепера по грунтовым и гравийным дорогам потребуется большая мощность двигателя, чем для копания грунта. Тогда двигатель подбирается по значению мощности, определяемому условиями транспортных операций. При заданной мощности тягача N (кВт) вместимость ковша скрепера (м3):
|
= |
1 |
|
|
3,6 KN N η |
− |
Kω F ν |
2max |
|
− |
Gск |
|
|
qк |
|
|
|
|
|
|
|
|
|
. |
|||
f γ |
|
ν max |
13 10 |
3 |
γ |
|
|||||||
|
|
г |
|
|
|
|
г |
|
|||||
Если задана вместимость ковша, то мощность тягача
|
ν max |
f (Gск+ γ г |
qk )+ 7,7 10 |
−5 |
3 |
|
N = |
Kω F ν |
max |
, |
|||
|
|
3,6 KN η |
|
|
||
|
|
|
|
|
|
где KN — коэффициент использования мощности двигателя, учитывающий также затраты энергии на привод вспомогательных ме-
ханизмов, KN = 0,8…0,85;
η — КПД трансмиссии в транспортном режиме;
Kω — коэффициент обтекания скрепера, Kω = 0,6…0,7; F — лобовая площадь скрепера, м2;
υmax — максимальная скорость транспортирования грунта;
15
f — коэффициент сопротивления качению по грунтовым до-
рогам, f = 0,035;
γг — объемный вес разрыхленного грунта, тс/м3; Gск — конструктивный вес скрепера, тc.
Для самоходного скрепера при работе без толкача необходимо, чтобы максимальная окружная сила на шинах ведущих колес была равнасуммарному сопротивлению копания или несколько превышала его.
Для самоходного скрепера расчетная сила тяги
Tp = (Pкmax − Pf )kд,
— максимальная окружная силанашинахведущих колес, кгс; Pf — сила сопротивления качению ведущих колес скрепера, кгс; kд — коэффициент динамичности, kд = 2.
Максимальную окружную силу колесного движителя Pк max можно определить по крутящему моменту двигателя (кгс):
P |
= |
M к |
= |
M e iм η м |
, |
|
|
||||
кmax |
|
rc |
|
rc |
|
|
|
|
|||
или по его мощности:
P |
= |
716, 2 Ne iм η м |
. |
|
|||
кmax |
|
rc ne |
|
|
|
||
где Mк — крутящий момент, приведенный к оси колеса, кгс·м; Me — крутящий момент двигателя, кгс·м;
Ne — мощность двигателя, л.с.; rc — силовой радиус колеса, м;
iм — передаточное число трансмиссии привода колесного движителя;
ηм — механический КПД этой же трансмиссии;
ne — частота вращения коленчатого вала двигателя.
По условиям сцепления пневматических шин с грунтом проверяется сила тяги колесного движителя:
Pк.сц = ϕ сц Rвед,
где φсц — коэффициент сцепления шин колесного движителя с поверхностью качения, φсц = 0,7…0,8.
16

Rвед — реакция грунта на ведущие колеса груженого скрепера, ориентировочно Rвед ≈ ϕ о(Gск + Gг ), ϕ о — коэффициент, учитываю-
щий распределение нагрузок на оси скрепера (принимается на основании данных табл. 8 прил. I).
Для прицепных скреперов максимальная сила тяги на крюке тягача Т > W (кгс):
T = Gт ϕ max kд,
где Gт — конструктивный вес тягача;
φmax — максимальный коэффициент сцепления гусениц (колес) тягача с грунтом, для гусениц ϕ max = 0,85...0,95, для колес φmax =
= 0,80…0,90.
При применении толкачей на загрузке должны быть соблюдены условия:
(Pкmax + Tт )ko ≥ W , (T + Tт )ko ≥ W ,
где Tт — толкающее усилие толкача, кгс;
ko — коэффициент одновременности работы толкача и тягача, ko = 0,85...0,90.
Необходимая мощность двигателя (л.с.) для прицепного скрепера при работе без толкача определяется по формуле
N = (Gт ( fo ± i) +W )ν р.х , 270 η
где Gт — конструктивный вес тягача, кгс;
fo — коэффициент сопротивления качению тягача;
νр.х — рабочая скорость скрепера, км/ч;
η— КПД трансмиссии скрепера.
Для самоходного скрепера со всеми ведущими колесами при работе без толкача необходимая мощность двигателя (л.с.)
N1 = |
W ν р.х |
. |
270 η |
17
4. РАСЧЕТ НАГРУЗОК, ДЕЙСТВУЮЩИХ НА СКРЕПЕР
4.1. Выбор расчетных положений
Анализ и практика работы скреперов позволяют установить расчетные положения, при которых действуют максимально возможные нагрузки. Именно эти расчетные нагрузки являются основными для расчета на прочность сборочных единиц и деталей скрепера.
В работе скреперов, как уже было отмечено, выделяются два режима: рабочий и транспортный. Они определяют основные расчетные положения:
1)конец резания грунта и наполнения ковша;
2)транспортное положение при движении машины с грузом. Режим копания грунта характеризуется максимальными нагруз-
ками на металлоконструкцию скрепера. Для этого режима рассматриваются следующие расчетные случаи:
1)конец заполнения и начало подъема ковша;
2)режим копания с вывешенными задними колесами скрепера. Транспортный режим груженого скрепера характеризуется ди-
намическими нагрузками. Для этого режима рассматриваем прямолинейное движение скрепера и движение скрепера в повороте.
4.2. Первое расчетное положение (конец заполнения ковша)
Условия работы:
1)скреперперемещаетсяравномернопогоризонтальнойповерхности;
2)ковш наполнен грунтом с «шапкой»;
3)толщина стружки принимается h = 0 , так как в конце наполнения ковша толщина стружки практически минимальна из-за ограничения свободной тяги машины;
4)скрепер работает с толкачом;
5)коэффициент одновременности работы трактора с толкачом
ko = 0,8 ;
6)коэффициент динамичности kд = 1;
7)коэффициент сцепления с грунтом φ = 0,9 (грунт естественной плотности);
18
8) коэффициент сопротивления качению f = 0,06 (грунт естественной плотности).
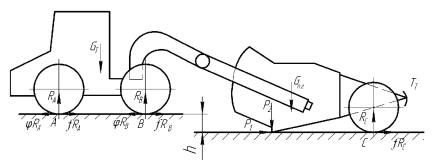
На машину действуют активные силы (рис. 4): Gт— вес тягача;
— вес полуприцепа, груженного грунтом с «шапкой»; Tт — сила тяги толкача;
φRA, φRB — окружные силы на ведущих колесах. На машину действуют реактивные силы:
RA, RB, RC — реакции на колесах тягача и полуприцепа; fRA, fRB, fRC — силы сопротивления качению;
P1, P2— реакции грунта на ноже ковша скрепера (силы сопротивления копанию).
Рис. 4. Схема для определения сил, действующих на скрепер в конце заполнения и начале подъема ковша. Первое расчетное положение
Силы сопротивления копанию, приложенные на режущей кромке ковша, состоят из касательной силы P1 и нормальной силы P2 (боковая сила при нормальных условиях работы не возникает). Касательная сила P1 может быть определена из условия тягового баланса
скрепера в предположении, |
что |
призма волочения отсутствует |
||
и, следовательно, на ее перемещение работа не затрачивается: |
||||
P = (T + T )k |
o |
−W , |
||
1 |
рас |
T |
п |
|
где Wп = (Gт + Gк+г ) f, f — сопротивление перемещению скрепера как
тележки, f = 0,08…0,15 в зависимости от грунта и давления воздуха в шинах колес.
19
Нормальная сила P2 в конце наполнения и при выглублении направлена вниз, а ее величина определяется по формуле
P = ψ P .
2 1
При выглублении ψ = 0,4...0,5.
Для определения неизвестных реакций система расчленяется на две части: тягачиполуприцеп.
Тягач через седельно-сцепное устройство догружается со стороны полуприцепа вертикальной силой, что улучшает сцепные качества трактора-тягача.
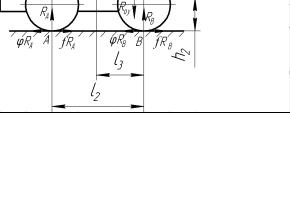
Для определения неизвестных реакций составляется система уравнений. (Линейныеразмерыврасчетахданывметрах, берутсясчертежей.)
Рис. 5. Схема сил, действующих на тягач
Условия равновесия тягача (рис. 5): l2 = 3200 мм, l3 = 2280 мм, l6 = 400 мм, h2 = 1400 мм.
∑M B = RA l2 − Gт l3 − Roy l6 + Rox h2 = 0,
∑M B = RA 3, 2 − Gт 2, 28 − Roy 0, 4 + Rox 1, 4 = 0,
∑X = −(ϕ − f )RA + (ϕ − f )RB + Rох = 0,
∑Y = RA + RB − Roy − Gт = 0.
20