

Аэрокосмическая техника высокие технологии и инновации – 2016
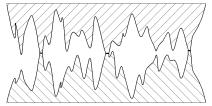
..pdf(рис. 2). Однако уровень шума завышен в области низких частот, что может быть связано с недостаточной эффективностью работы использованных глушителей.
а |
б |
Рис. 2. Третьоктавные спектры шума струй, измеренного под углом 30°, для различных скоростей:
а – результаты ПНИПУ; б – результаты GTRI [7]
Для решения данной задачи струйная установка была доработана путем добавления ресивера перед соплом. Внутри ресивера установлены три кольцевых слоя звукопоглощающего материала в стеклоткани, облицованные перфорированным металлическим листом. Предварительные измерения скорости потока на срезе сопла с помощью трубки Пито показали, что установка ресивера не привела к снижению скорости. Измерения шума струи в тех же точках дальнего поля показали, что ресивер снизил уровень шума в полосе частот 100–500 Гц.
Измерения шума на срезе выхлопного коллектора также выявили его завышенный уровень, особенно на низких частотах. Для усиления подавления низкочастотного шума от вентилятора 1 (см. рис. 1). авторами разработана конструкция воздуховодов с тупиковыми ответвлениями длиной 1,2 м, в которых расположен звукопоглощающий материал. Данный вариант выгодно отличается меньшими газодинамическими потерями от распространенного способа установки звукопоглощающих конструкций в воздуховодах с частичным перекрытием площади их поперечного сечения [8].
51
Работа выполнена при финансовой поддержке гранта правительства РФ по постановлению № 220 «О мерах по привлечению ведущих ученых в российские образовательные учреждения высшегопрофессиональногообразования» подоговору№14.Z50.31.0032.
Список литературы
1.Экспериментальное исследование звукопоглощения акустических клиньев для заглушенных камер / И.В. Беляев, А.Ю. Голубев, А.Я. Зверев, С.Ю. Макашов, В.В. Пальчиковский, А.Ф. Соболев, В.В. Черных // Акустический журнал. – 2015. –
Т. 61, № 5. – С. 636–644.
2.Определение зоны свободного звукового поля заглушенной камеры ПНИПУ / В.В. Пальчиковский, Ю.В. Берсенев, С.Ю. Макашов, И.В. Беляев, И.А. Корин, Е.В. Сорокин, И.В. Храмцов // Аэрокосмическая техника, высокие технологии и инновации. – 2015. – Т. 1. – С. 398–401.
3.Создание заглушенной установки для аэроакустических экспериментов и исследование ее акустических характеристик / В.Ф. Копьев, В.В. Пальчиковский, И.В. Беляев, Ю.В. Берсенев, С.Ю. Макашов, И.В. Храмцов, И.А. Корин, Е.В. Сорокин, О.Ю. Кустов// Акустическийжурнал. – 2017. – Т. 63, №1. – С. 1–13.
4.Разработка генератора вихревых колец со сменными сопловыми насадками / И.В. Храмцов, П.В. Писарев, В.В. Пальчиковский, Р.В. Бульбович, В.В. Павлоградский // Актуальные проблемы современного машиностроения: сб. тр. междунар. науч.-
практ. конф. – Юрга, 2014. – С. 194–199.
5.Экспериментальное исследование шума турбулентных
вихревых колец в заглушенной камере / В.Ф. Копьев, М.Ю. Зайцев, В.В. Пальчиковский, И.В. Храмцов, Ю.В. Берсенев // Вестник Пермского национального исследовательского политехнического университета. Аэрокосмическая техника. – 2016. – № 45. – C. 133–151.
6.Храмцов И.В., Пальчиковский В.В., Шаврина Е.В. Выбор размещения системы отвода воздушной струи в заглушенной камере // Научно-технический вестник Поволжья. – 2015. – № 4. –
С. 142–144.
7.Gaeta R.J., Ahuja K.K. Subtle differences in jet-noise scaling with narrowband spectra compared to 1/3-octave band [Электронный
52
ресурс] // AIAA Paper 2003-3124. – URL: http://arc.aiaa.org/doi/ abs/10.2514/6.2003-3124 (дата обращения: 2.10.2016).
8. Ahuja K.K. Designing clean jet-noise facilities and making accurate jet-noise measurements // Int. J. Aeroacoustics. – 2003. – Vol. 2, № 3, 4. – P. 371–412.
УДК 621.011.015:539.422
МОДЕЛИРОВАНИЕ ВЗАИМОДЕЙСТВИЯ РАБОЧИХ ТЕЛ И ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ ПРИ ВИБРОУДАРНОЙ ОБРАБОТКЕ
М.Е. Попов, А.М. Попов, О. Хашаш
Донской государственный технический университет, Ростов-на-Дону, Россия
mepop@yandex.ru
Рассматривается задача моделирования движения и столкновений твердых тел рабочей среды и обрабатываемых деталей при виброударной обработке. Предложены формулы для расчета линейной и угловой скорости тел после столкновения.
Ключевые слова: виброударная обработка, виброволновая обработка, точка коллизии, столкновение твердых тел.
Виброударное воздействие обусловлено действием направленных колебаний по различным технологическим схемам. Базовой схемой является виброобработка в рабочей камере с обрабатывающей гранулированной средой в виде твердых тел [1]. От стенок рабочей камеры вибрация передается прилегающим слоям рабочей среды, которые передают ее следующим слоям и т.д.
Определение коллизий объектов произвольной формы – трудная задача, имеющая высокую вычислительную сложность, поэтому широко применяется метод определения коллизий при помощи аппроксимирующих контейнеров [2]. В этом случае формы виртуальных объектов описываются (аппроксимируются) различными геометрическими примитивами и задача определения коллизий самих объектов сводится к нахождению коллизий их аппроксимирующих контейнеров.
53

Рассмотрим постановку задачи на примере двух тел [3]. Оба тела заданы набором треугольников, координаты которых хранятся в трех массивах X, Y, Z. У тел известны векторы линейной и угловой скоростей и массы М1, М2. Требуется определить координаты точки коллизии, векторы линейной и угловой скоростей каждого тела после столкновения.
При соударении тела могут соприкасаться как в одной точке, так и некоторой поверхностью. В любом случае данный алгоритм определяет точку, от которой впоследствии следует отсчитывать ударный импульс.
Первая фаза. Вокруг центра масс каждого тела описывается сфера радиусом, равным расстоянию между центром масс и максимально удаленной от него точкой фигуры. В момент, когда сферы начнут соприкасаться, т.е. расстояние между центрами масс станет меньше суммы радиусов сфер, происходит переход во вторую фазу.
Вторая фаза. Заметим, что в общем случае пересечение координат фигур по трем осям еще не означает, что тела действительно пересеклись. Зададим также параметр ε – точность алгоритма. Считаем, что тела пересеклись, если кратчайшее расстояние между ними не превосходит это число. Для определения точки столкновения берем один треугольник первого тела и все точки второго.
Рис. 1. Схема определения точки столкновения твердых тел
Шаг 1. Одну из точек данного треугольника сдвигаем в начало координат и разворачиваем его так, чтобы он лежал в одной из плоскостей координат. На рис. 1 треугольник лежит в плоскости xy. Эти преобразования нетрудно проделать, используя матрицы поворота вокруг осей координат, так как углы поворота в данном случае известны, а при нормировке сторон треугольни-
54
ка будут известны синус и косинус углов поворота. На эти же полученные матрицы поворота умножаем все точки второго тела.
Шаг 2. После разворота второго тела проверяем все его координаты по оси у. В случае, если имеются точки, отличающиеся по оси у от нуля не более чем на ε, будем далее проверять эти точки на пересечение с треугольником. Если таких точек несколько, то, возможно, тела соприкасаются поверхностью. На рисунке рассмотрена одна точка.
Шаг 3. Все последующие действия заключаются в том, чтобы развернуть треугольник и точку, подозрительную на пересечение, так, чтобы одна из сторон треугольника была параллельна оси Ох. В каждом случае проверяем неравенство
xmin x xmax ,zmin z zmax .
Если хотя бы в одном случае оно не выполняется, то пересечения нет.
В случае, когда имеется несколько точек, подозрительных на пересечение, мы определяем пересечение области с треугольником и точку коллизии находим посередине пересечения.
Шаг 4. Для того чтобы определить координаты данной точки в абсолютной системе координат, мы проделываем с ней обратные преобразования, т.е. разворачиваем на те же самые углы, только со знаком «–». Для этого в матрице поворота достаточно поменять несколько знаков.
Также имеет смысл, используя имеющиеся матрицы поворота, построить нормаль к поверхности соударения, так как она понадобится для дальнейшего расчета линейных и угловых скоростей. На шаге 3 нормаль всегда будет иметь координаты {0,1,0}. Умножая этот вектор на матрицы обратного поворота, получим координаты вектора нормали в абсолютной системе координат.
После того как стали известны координаты точки коллизии
ивекторы нормалей к поверхностям, для каждого тела соединим точку столкновения с центром масс С1 и С2 и получим векторы r1
иr2. Обозначим через ν1 и ν2 линейные скорости тел до столкновения, через V1 и V2 – линейные скорости после столкновения. Угловые скорости обозначим через w1, w2 и W1, W2 соответствен-
55
но. В данной задаче под взаимодействием тел мы понимаем разлет тел в разные стороны после столкновения без учета деформации и раскола. Будем считать, что коэффициент восстановления E скорости тел после удара известен. Импульсы тел относительно главных осей инерции также известны и равны соответственно
A, B, C и A2,B2,C2.
1 1 1
Рассчитаем для каждого тела величины x , y , z – проекции векторов , где
|
|
1, |
1, |
1 |
|
|
|
||||
r n |
|
rx, ry, rz |
|
||
|
|
nx, ny, nz |
|
||
ry nz rz ny, rz nx rx nz, rx ny ry nz .
На рис. 2 изображены ударные импульсы тел S1 и S2 , рав-
ные по модулю и противоположные по направлению, направленные по нормалям к поверхности соударения. В расчетах нас интересует лишь модуль ударного импульса, который рассчитывается по формуле
|
|
|
S |
1 E |
v1 n1 v2 n2 w1, 1 w2 , 2 , |
||||||||||||
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
где G |
M |
1 |
M |
2 |
|
2 |
|
12y |
|
2 |
2 |
22 y |
|
2 |
|||
|
|
|
|
1x |
|
|
1z |
2 x |
|
|
2 z . |
||||||
M |
|
M |
|
|
B |
B |
|||||||||||
|
1 |
2 |
|
A |
|
|
C |
A |
|
C |
2 |
||||||
|
|
|
|
|
1 |
|
1 |
|
1 |
2 |
2 |
|
|
||||
Таким образом, векторы линейных и угловых скоростей после соударения будут вычисляться по формулам
V v |
S |
n |
|
; |
|
V |
v |
|
S |
n |
; |
|
||||||
|
|
|
|
|
||||||||||||||
1 |
1 |
M1 |
1 |
|
|
2 |
|
2 |
M |
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
W |
w |
S |
|
; |
W |
w |
S |
1y |
; |
|||||||||
|
|
1x |
|
|
||||||||||||||
|
|
|
|
|
||||||||||||||
1x |
1x |
|
|
|
|
A1 |
|
|
1y |
|
1y |
|
|
|
B1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W |
w |
S 1z ; |
W |
|
w |
S 2x ; |
||||||||||||
1z |
1z |
|
|
|
C1 |
|
2x |
|
2x |
|
|
|
A2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W |
w |
|
S |
|
2 y |
; |
W |
|
w |
S |
|
2z . |
||||||
|
|
|
|
|
|
|||||||||||||
2 y |
2 y |
|
|
|
|
B2 |
|
2z |
|
2z |
|
|
|
C2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
56

В случае соударения твердого тела с неподвижно закрепленным телом (рис. 3) нетрудно видеть, как изменится формула для расчета ударного импульса:
S |
1 E |
v1 n1 w1 , 1 ; |
G |
1 |
|
|
2 |
12y |
|
2 |
|
|
|
|
1x |
|
|
1z . |
|||
G |
M |
|
B |
|||||||
|
|
|
1 |
|
A |
|
C |
|||
|
|
|
|
|
|
1 |
1 |
|
1 |
Рис. 2. Схема определения |
Рис. 3. Схема динамического |
линейной и угловой скорости |
взаимодействия подвижного |
после столкновения |
твердого тела с неподвижным |
Все вышеперечисленные формулы следуют из теоремы о движении центра масс, теоремы об изменении количества движения и гипотезы Ньютона. Большой интерес представляет моделирование взаимодействия между собой большого количества объектов. Однако реализация предложенных алгоритмов является довольно трудоемкой задачей в случае большого количества взаимодействующих объектов, что имеет место при виброударной и виброволновой обработке деталей.
Список литературы
1.Бабичев А.П. Основы вибрационной технологии. – Ростов н/Д: Издательский центр ДГТУ, 2008. – 624 с.
2.Трушин А.М. Обработка коллизий виртуальных объектов
спомощью метода последовательных импульсов // Труды НИИСИ РАН. – 2014. – Т. 4, № 2. Математическое и компьютерное моделирование сложных систем: теоретические и прикладные аспекты. – С. 95–105.
3.Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретиче-
ской механики: в 2 т. – М.: Наука, 1979. – Т. 1. – 272 с.; Т. 2. – 574 с.
57

УДК 621.9.015
ФОРМИРОВАНИЕ МИКРОНЕРОВНОСТИ ПОВЕРХНОСТЕЙ ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ РЕЗАНИЕМ И МЕТОДОМ ППД ОСЦИЛЛИРУЮЩИМ ИНСТРУМЕНТОМ
М.Е. Попов, М.Е. Игбоануго, С.О. Попова
Донской государственный технический университет, Ростов-на-Дону, Россия
mepop@yandex.ru
Дан анализ микронеровностей поверхностей, полученных резанием и отделочно-упрочняющей обработкой методом ППД осциллирующим инструментом.
Ключевые слова: детали машин, микронеровности поверхности, обработка ППД, осциллирующий инструмент.
Процесс контактирования деталей определяется геометрическими параметрами, характеризующими шероховатость, волнистость, отклонения от правильной геометрической формы, и физико-механическими свойствами сопрягаемых поверхностей, управлять которыми можно с помощью технологии обработки деталей (рис. 1).
Рис. 1. Характеристики микропрофиля поверхности
К качеству исполнительных поверхностей деталей фрикционных передач (ручьи шкивов, диски вариаторов, диски сцеплений и др.) предъявляются высокие требования. Основной задачей таких деталей является передача максимального усилия без проскальзывания. Для этого необходимо стремиться к достижению
58
как можно более высокого коэффициента трения, который напрямую зависит от микрогеометрии контактирующих поверхно-
стей [1, 2].
При трении без смазки в условиях приработки соприкосновение двух трущихся деталей происходит не по всей номинальной площади этих поверхностей, а лишь по соприкасающимся между собой вершинам выступающих неровностей обеих трущихся поверхностей (рис. 2). Таким образом, давление одной поверхности на другую распределяется лишь на фактически находящиеся в контакте микроплощадки, вследствие чего истинные напряжения смятия на этих площадках могут быть столь велики, что соприкасающиеся выступы профиля будут упруго деформироваться, и пластически сжиматься, и даже срезаться при взаимном скольжении поверхностей. Следовательно, необходимо добиться повышения фактической площади контакта так, чтобы в процессе приработки износ трущихся поверхностей был минимальным.
Рис. 2. Фактический контакт шероховатых поверхностей
Существует два принципиальных метода повышения коэффициента трения контактирующих поверхностей: конструкторский и технологический.
К конструкторским методам можно отнести: армирование поверхности, т.е. внесение в поверхностный слой детали твердых включений, выступающих над основным материалом; изменение конструкции деталей, например, армирование ручья полимерного шкива металлической футеровкой с нанесенным на нее регулярным макрорельефом [3, 4].
Технологические методы заключаются в достижении оптимальной шероховатости поверхности деталей за счет варьирования методов и режимов механической обработки.
59

Оба направления перспективны, однако в данной работе рассматриваются только методы управления шероховатостью поверхности.
Для расчета контактных деформаций необходимо выступы поверхности моделировать телами правильной геометрической формы, для которых получены решения упругости и пластичности.
Микронеровности могут иметь различный характер: сферический, кубический, пирамидальный (рис. 3).
Для каждого вида неровностей характерны свои особенности: опорная кривая, сопротивление деформации, приработочный износ и др. (рис. 4).
Рис. 3. Различные формы микронеровностей
а |
б |
в |
Рис. 4. Опорная кривая для разных форм выступов: а – сферического; б – кубического; в – пирамидального
Из представленных рисунков видно, что сферический характер выступов более предпочтителен: они обладают большей устойчивостью, более благоприятной опорной кривой и, очевидно, меньшим приработочным износом, так как опорная длина профиля p резко возрастает при относительно небольшом из-
носе (рис. 5). Кроме того, подобный характер микронеровностей поверхности является более обтекаемым, что способствует лучшему заполнению впадин материалом контртела, а также содержит меньше концентраторов напряжений и меньше вероятность среза отдельных выступов.
60