

Учебное пособие 800213
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
А.М. Литвиненко М.А. Васильев
САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Утверждено Редакционно – издательским советом университета в качестве учебного пособия
Воронеж 2005
УДК 658.52.011.56.012.3.005:658.012.011.56
Литвиненко А.М., Васильев М.А. Самонастраивающиеся системы автоматического управления: Учеб. пособие. Воронеж: Воронеж.
гос. техн. ун-т, 2005. 118 с.
В учебном пособии изложены основы теории самонастраивающихся систем автоматического управления.
Учебное пособие соответствует требованиям Государственного образовательного стандарта высшего профессионального образования, специальности 220201 ―Управление и информатика в технических системах‖, курса ―Специализированные исполнительные устройства‖ для очной формы обучения.
Учебное пособие подготовлено на электронном носителе в текстовом редакторе MS WORD97.0 и содержится в файле ―СНС1.doc‖,
―СНС2.doc‖
Табл. 1. Ил. 43. Библиогр.: 38 назв.
Научный редактор д-р техн. наук, проф. В.Л. Бурковский Рецензенты: НИИ Механотроника-Альфа (ген. директор канд.
техн. наук, Э.Г. Кузнецов)
д-р техн. наук, проф. Ю. С. Сербулов (ВИВТ)
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
©Литвиненко А.М., Васильев М.А.,
2005
©Оформление. Воронежский государственный технический университет, 2005
ВВЕДЕНИЕ
Адаптивной или самонастраивающейся системой называется разновидность кибернетических систем, которая обеспечивает автоматическое приспосабливание к изменению внешних воздействий и (или) параметров объекта управления при обеспечении необходимого качества управления путем изменения структуры и (или) параметров системы, которая обладает одним из следующих качеств:
-многоканальностью;
-многорежимностью;
-многомерностью;
-неполным детерминизмом;
-повышенной сложностью вследствие необходимости иметь повышенную избыточность;
Многоканальность характеризуется тем, что любая адаптивная система имеет как минимум два контура: 1) основной; 2) контур самонастройки (адаптации).
Многорежимность характеризует существенно различные совокупности внешних воздействий, приложенных к объекту и как следствие необходимость иметь различные совокупности настроек (режимов объекта). Например, электроприводы позиционные металлорежущих станков имеют режимы разгона, установившегося режима, торможения. К системе управления самолетом предъявляются существенно различные требования на режимах взлета-посадки и горизонтального полета.
Многомерность характеризуется наличием нескольких координат. Например, у металлорежущих станков три поступательные координаты перемещения обрабатывающего инструмента (резец, фреза, сверло); промышленный робот характеризуется шестью координатами перемещения рабочего органа. Это же относится к летательным аппаратам.
Неполный детерминизм (неопределенность системы) характеризует отсутствие информации о том, какие параметры
икак нужно изменять в процессе адаптации или каким образом изменить структуру системы. Неопределенность может быть внесена через внешнюю среду, поскольку в общем случае неизвестно как изменяются внешние условия и какое воздействие при этом будет оказано на структуру и параметры системы. Неопределенность появляется также в том, что заранее неизвестно при каком сочетании параметров достигаются оптимальные критерии качества. Кроме этого, существует неопределенность в объеме априорной информации при определении начального состояния системы. В адаптивных системах неопределенность теоретически существует лишь некоторое время. В дальнейшем, в результате функционирования система «обучается», неопределенность раскрывается и может быть теоретически полностью устранена. Но практически любая система обладает конечным временем приспособления, конечным ресурсом (числом параметров)
иконечным многообразием структуры. Вследствие этого быстро раскрыть неопределенность не удается, система сохраняет признак индетерминизма.
Повышенная сложность адаптивных систем появляется вследствие необходимости иметь большую избыточность (резервирование), поскольку только при этом можно достаточно полно разрешить неопределенность. Избыточность обычно проявляется в многоконтурности, многоструктурности, многопараметричности. Большинство адаптивных систем отличаются от обычных добавлением контура самонастройки (адаптации). Если же возникает необходимость изменять параметры контура самонастройки, то добавляется третий контур и т.д. Однако условия соподчиненности соблюдается не всегда и в некоторых случаях многоконтурность существует наряду с равноправностью контуров.
Характерной особенностью адаптивных САУ, сближающих их с оптимальными, является наличие у них некоторого критерия качества. J – функционала или функции, с помощью которого можно оценить выбранные показатели работы системы.
3 |
4 |
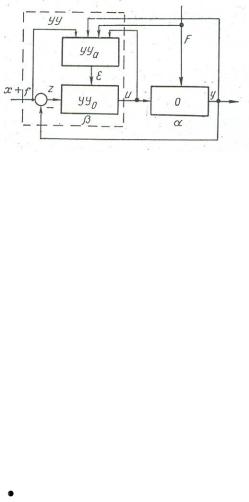
Рис.1. Обобщенная структурная схема адаптивной системы
Классификация адаптивных систем. Адаптивные системы разделяются:
1.По целевому назначению:
-Системы с сохранением заданных динамических характеристик (стабилизация качества) – направлена на удержание критерия качества J.
-Системы с оптимизацией качества – на поиск и поддержание оптимального значения J.
-Система с сохранением условий устойчивости.
-Системы с сохранением условий инвариантности (невозмущаемая система).
-Система с сохранением заданных статических характеристик.
Система с сохранением заданных перегрузок (система с ограничением по ускорению).
-Система с сохранением условий подобия (система с моделью).
-Система с сохранением состава элементов и связи межу ними, в которой на основе информации о внешних воздействиях, динамических характеристиках объекта или систе-
мы, получаемых в процессе работы, осуществляется активное изменение параметров регулятора для обеспечения оптимальной работы системы – самонастраивающаяся система (СНС).
- Система с сохранением состава элементов, характеризуется наличием процесса формирования алгоритма управления, который связан не только с изменением параметров, но и с изменением структуры - самоорганизующиеся системы.
Применение адаптивного управления позволяет:
1.Осуществлять оптимизацию режимов работы объектов.
2.Обеспечивать работоспособность в условиях широкого изменения динамических свойств объекта.
3.Повысить надежность системы.
4.Унифицировать отдельные регуляторы или их блоки и приспособить их для работы с различными типами объекта.
5.снизить технологические требования к изготовлению узлов системы.
6.Сократить сроки разработки и доводки системы.
Классификация СНС.
По выбору источника текущей информации и способа получения ее в процессе функционирования:
1.СНС по входу сигнала.
2.СНС по выходному сигналу.
3.СНС по корреляции входного и выходного сигнала.
4.СНС по параметрическому воздействию.
5.СНС под влиянием изменения позиции на нелинейных характеристиках или самих характеристик, например, экстремальных.
6.СНС под влияние изменения комбинации параметров или
комбинации характеристик.
По способу получения рабочей информации:
1. Системы с исполнением дополнительных воздействий (сис-
5 |
6 |

темы с пробным сигналом), поисковые системы.
2.Системы без дополнительных воздействий (аналитические или безпоисковые).
3.Системы с непосредственным получением информации о состоянии объекта.
4.Системы с косвенным получением информации о состоянии объекта.
По способу реализации отклонения критерия качества
(условия самонастройки от его оптимального значения в алгоритме управления).
1.С непрерывной отработкой алгоритма
2.С дискретной отработкой алгоритма
3.С экстремальным исполнением.
По виду технических средств, используемых для получения необходимой рабочей информации и для преобразования еѐ в алгоритм управления:
1.По типу датчиков статических и динамических характеристик.
2.По виду датчиков косвенных показателей, выполненных на основе моделей или фильтров.
3.По виду преобразователей и формирователей сигналов (непрерывных или дискретных.)
4.По виду запоминающих и логических устройств.
5.По виду исполнительных устройств.
Самонастройка и инвариантность – важнейшие понятия в современной автоматике, взаимосвязаны и взаимообусловлены.
Целесообразность сочетания двух этих понятий кратко можно охарактеризовать тем, что инвариантность является целью функционирования системы, т.е. свойством системы противостоять возмущению, а самонастройка является средством достижения этой цели. Условие инвариантности, как и условие устойчивости можно выразить через коэффициенты уравнений, которые являются отображением физических процессов в
системе, осуществляющихся с определѐнной точностью. Поэтому стабилизация условий инвариантности не может ещѐ означать полной не6возмущаемости. Кроме этого, обязательно должны выполняться условия физической реализуемости инвариантной системы, что является сложной технической задачей.
Рассмотрим наиболее распространѐнное условие инвариантности – критерий Щепанова, если имеется система уравнений:
a11 x1 |
a12 x2 |
... |
a1n xn |
f1 |
a21 x1 |
a22 x2 |
... |
a2n xn |
f 2 |
....................................... |
|
|||
an1 x1 |
an 2 x2 |
... |
ann xn |
f n |
характеризующее процесс о системе управления, то условие невозмущаемости координаты xi по отношению к возмущению fj определяется путѐм вычѐркивания i-ой строки и j-го столбца. Оставшийся минор (минор Щепанова) должен быть равен нулю при условии, что остальные возмущения линейно не зависят от fj.
Рассмотрим пример, пусть система управления описывается системой линейных алгебраических выражений:
a11 x1 |
a12 x2 |
a13 x3 |
f1 |
a21 x1 |
a22 x2 |
a23 x3 |
0 |
a31 x1 |
a32 x2 |
a33 x3 |
0 |
Найти условие инвариантности.
В этом случае инвариантность координаты x2 относительно возмущения f1 будет иметь вид:
a21 |
a23 |
0 |
|
a31 |
a33 |
||
|
Эффективным критерием инвариантности является принцип двухканальности, предложенный академиком Б. Н. Петровым, согласно которому должно существовать не менее двух каналов передачи воздействий. Например, для системы:
7 |
8 |
|
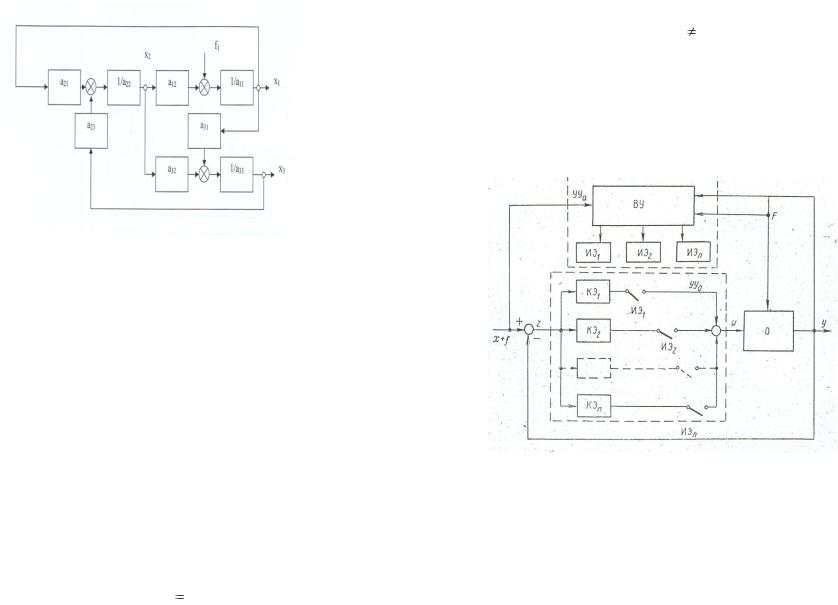
Рис.2. Структурная схема инвариантной САР
Для этой системы передача влияния возмущения f1 на координату x2 осуществляется по двум каналам:
1/а11, а31, 1/а33, а23, 1/а22 1/а11, а21, 1/а22
Исключив изменение операторов 1/а11 и1/а22, входящих в оба канала, заключаем, что компенсацию изменений а31, 1/а33, а23 можно осуществить с помощью а21.
При рассмотрении инвариантных СНС возникают две задачи: первое, как обнаружить причину нарушения условий инвариантности; второе, какие требования должны быть предъявлены контуру самонастройки с тем, чтобы выполнялось условие инвариантности. Первая задача может быть решена следующим образом. Пусть передача возмущения осуществляется по двум каналам с передаточными функциями W1(p) и W2(p). Условие инвариантности x от f означает равенство нулю корреляционной функции между входной и выходной величинами:
kxf 0
Поэтому, устанавливая коррелятор между входной и выходной величиной x и возмущением f при малейшем нару-
шении инвариантности получим:
kxf 0 ,
т. е. сигнал, с помощью которого можно изменять W1(p) до тех пор, пока не будет обеспечено условие инвариантности.
Для решения второй задачи основным является вопрос согласования быстродействия контура самонастройки и основного контура. Т.е., если время отработки контура самонастройки не значительно по сравнению со временем существенного изменения f(t), то можно получить по крайней мере частично инвариантную САР.
Рис.3. Структурная схема самоорганизующейся системы
Самонастраивающаяся система (СНС) автоматического управления, самоприспосабливающаяся система, в которой приспособление к случайно изменяющимся условиям обеспечивается автоматическим изменением параметров настройки или путѐм автоматического поиска оптимальной настройки. В любой несамонастраивающейся автоматической системе управления имеются параметры,
9 |
10 |
которые влияют на устойчивость и качество процессов управления и могут быть изменены при регулировке (настройке) системы. Если эти параметры остаются неизменными, а условия функционирования (характеристики управляемого объекта, возмущающие воздействия) существенно изменяются, то процесс управления может ухудшиться или даже стать неустойчивым. Ручная настройка системы часто оказывается обременительной, а иногда и невозможной. Использование в таких случаях самонастраивающейся системы технически и экономически целесообразно и даже может оказаться единственным способом надѐжного управления. СНС подразделяют на поисковые и беспоисковые. В поисковых СНС необходимое качество управления достигается в результате автоматического поиска оптимальной (в некотором смысле) настройки. Качество настройки характеризуется некоторым обобщѐнным показателем, связанным с первичными параметрами настройки сложным, обычно не вполне стабильным и недостаточно известным соотношением. Этот показатель измеряется непосредственно или вычисляется по измеренным значениям первичных параметров. Параметрам настройки в СНС придаются поисковые или пробные изменения. Анализ колебаний показателя качества настройки, вызванных поисковыми воздействиями, позволяет установить, является ли настройка оптимальной, т. е. соответствующей экстремуму (максимуму или минимуму) показателя качества. Если имеют место отклонения от экстремума, то настройка изменяется до тех пор, пока не приблизится к оптимальной. Поисковые СНС могут работать при изменении внешних условий в широких пределах. Беспоисковые СНС имеют перед поисковыми системами определѐнное преимущество, обусловленное тем, что поиск оптимального состояния отнимает значительное время, т. е. время самонастройки поисковых систем ограничено снизу. В беспоисковых СНС используется некоторый контролируемый показатель качества управления (например, значение производной контролируемого параметра по времени). Автоматической настройкой параметров
этот показатель поддерживается в заданных пределах. В зависимости от вида показателя различают СНС с контролем переходных процессов, с контролем частотных характеристик, с эталонной моделью и др. Всѐ это - замкнутые беспоисковые СНС с замкнутым контуром самонастройки, в котором параметры настройки автоматически изменяются при выходе показателя качества за допустимые пределы. Некоторые замкнутые беспоисковые СНС близки к обычным нелинейным системам автоматического управления с пониженной чувствительностью к характеристикам объекта - к таким, например, как релейные системы или управления системы с переменной структурой. Наряду с замкнутыми применяют также разомкнутые СНС - т. н. системы параметрической компенсации. В этих СНС контролируются воздействия, вызывающие изменение свойств объекта, и по заранее рассчитанной программе изменяются параметры настройки системы; контур самонастройки в этом случае разомкнут. Такая самонастройка может быть почти мгновенной, однако еѐ осуществление требует контроля окружающей среды и достаточно точного знания законов воздействия среды на управляемый объект. Самонастройка реализуется как специальной аппаратурой (в виде блоков самонастройки или самонастраивающихся экстремальных регуляторов), так и адаптивными алгоритмами центральных управляющих ЦВМ. Придание алгоритмам управления свойств самонастройки (адаптации) существенно расширяет возможности управления разнообразными процессами. Внедрение СНС позволяет приблизиться к оптимальным режимам функционирования объектов, облегчает задачу унификации систем управления, сокращает время на испытания и наладку, снижает технологические требования на изготовление ряда узлов устройств управления, освобождает обслуживающий персонал от трудоѐмких операций настройки. Практическое использование С. с. и самонастраивающихся алгоритмов - одна из характерных черт технического прогресса в области управления.
11 |
12 |
ГЛАВА 1. САМОНСТРАИВАЮЩИЕСЯ СИСТЕМЫ С ПАРАМЕРТИЧЕСКИМИ СВЯЗЯМИ
1.1. Особенности самонастройки
всистемах с переменными параметрами
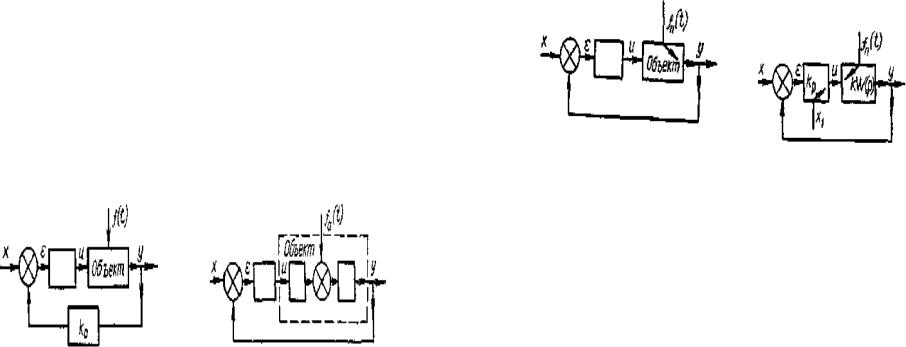
Ксистемам автоматического управления (САУ) (рис. 1.1) предъявляются два основных требования, точное воспроизведение входного сигнала х(t) и полная компенсация возмущения, действующего на объект f(t). Действие возмущения f(t) приводит к изменению сигнала на выходе у(t), а это изменение передается по цепи обратной связи и приводит к появлению сигнала и (или его приращения), который и компенсирует влияние f(t). Такова качественная сторона. Однако для полного представления явлений, происходящих в системе, необходимо
Рис. 1.1. Схема од- |
Рис. 1.2. Координат- |
|
ное возмущение fa (t), |
||
ноконтурной системы |
||
действующее в системе |
||
автоматического |
||
автоматического управле- |
||
управления |
||
ния |
||
|
установить количественные соотношения и выяснить природу возмущения f(t).
Возмущения f(t), действующие на систему, можно разделить на два вида:
- возмущения, имеющие физическую природу сигнала,
проходящего через объект и впоследствии суммирующегося в какойто точке с сигналом управления (рис. 1.2). Такие возмущения назовем аддитивными помехами f(t);
- возмущения, влияющие на выходную величину системы пу-
Рис. 1.3. Параметрическое возму-
щение fn (t), действующее в системе
Рис. 1.4. Компенсация изменений коэффициента передачи объекта k (t) изменениями коэффициента передачи регу-
лятора kp (t)
тем изменения параметров объекта. Такие возмущения назовем параметрическими fn(t), и в отличие от f(t) будем их обозначать стрелкой, входящей в прямоугольник (рис. 1.З).
Отличие аддитивных помех от параметрических возмущений состоит в том, что они оказывают влияние на регулируемую величину путем непосредственного воздействия на сигнал управления, в то время как параметрические возмущения влияют через параметры объекта.
Вопросом компенсации помех и параметрических воздействий, их влияния на динамическую точность, как известно, занимается теория инвариантности. Математически эту задачу в простейшем виде
для линейной системы можно сформулировать так. |
|
Пусть уравнение линейной системы представлено в виде |
|
y(p)=Wx(p)x(p) + Wf(p)fa(p), |
(1.1) |
13 |
14 |
где Wх (р), Wf (p) — передаточные функции системы по управляющему и возмущающему воздействиям соответственно; fa (t) — произвольная аддитивная помеха.
Известно, что система называется абсолютно инвариантной, если в (1.1)
Wf(p)fa(p) = 0. (1.la)
Достижение абсолютной инвариантности связано с выбором структуры системы, нечувствительной к помехам, не связано ни с изменением параметров, ни с изменением структуры в процессе функционирования. Компенсация помех в этих системах происходит за счет формирования сигнала на входе объекта, способного компенсировать нежелательные изменения выходного сигнала у, вызванные помехой fa(t).
Наряду с проблемой инвариантности возникает проблема адаптивности [6] или самоприспосабливания системы, вызванная действием параметрических возмущений. Будем считать, что система обладает адаптивными свойствами, если ее параметры автоматически изменяются в соответствии с параметрическими или иными воздействиями, с целью сохранения или изменения в необходимом направлении качественных показателей системы. Эта проблема решается с помощью самонастраивающихся систем.
Математически проблему адаптивности сформулировать значительно сложнее, чем проблему инвариантности. Даже поддержание постоянства коэффициента передачи системы при изменении только одного коэффициента передачи объекта k является непростой задачей. Действительно, рассмотрим случай, когда значительные изменения коэффициента передачи объекта k(t) в САУ могут быть компенсированы изменениями коэффициента передачи регулятора kp (рис. 1.4). Пусть уравнение объекта имеет вид
n |
|
n |
|
|
a y(i) |
k(t) |
b |
u( j ) , |
(1.2) |
i |
|
j |
|
|
i 0 |
j |
0 |
|
|
где k(t) — коэффициент передачи объекта;
y(i) |
d i y |
;u( j ) |
d ju |
; |
|
dti |
dt j |
||||
|
|
|
ai, bj — постоянные коэффициенты.
Если u kp (t) , а  x y , то уравнение замкнутой системы принимает вид
x y , то уравнение замкнутой системы принимает вид
n |
|
m |
|
|
|
a y(i) |
k(t) |
b (k |
p |
(t)(x y))( j ) . |
(1.3) |
i |
|
i |
|
|
|
i 0 |
j |
0 |
|
|
|
Раскрывая правую часть уравнения (1.З) по формуле Лейбница и производя группирование членов, нетрудно заметить, что коэффициенты левой части при производных до порядка т включительно будут зависеть от kp и его производных. Поэтому только при достаточно медленных изменениях kp (t), а значит, и k (t) можно вместо (1.З) записать
m 1 |
m |
|
|
|
|
|
|
|
|
m |
|
|
|
a y(i) |
(a |
j |
kk |
p |
b |
j |
) y( j ) |
k(t) |
b |
x( j ) , |
(1.3а) |
|
i |
|
|
|
|
|
j |
|
|
|||
i n |
j 0 |
|
|
|
|
|
|
|
j |
0 |
|
|
и проблема адаптивности сведется только к поддержанию
kkp = const. (1.4)
Одним из эффективных методов борьбы с аддитивными помехами и параметрическими воздействиями является увеличение коэффициента передачи разомкнутой цепи в пределе до бесконечности Такие системы являются нечувствительными, т. е. инвариантными системами к возмущениям любого вида. Однако практически большие коэффициенты передачи редко реализуемы, к тому же конечные значения коэффициента усиления все равно не могут компенсировать изменения других параметров системы и, следовательно, качество процессов регулирования будет зависимым от изменений коэффициента передачи. Применение систем с большим коэффициентом усиления дает хорошие результаты при использовании их в автоколебательном режиме, т. е. в самонастраивающихся системах с предельным циклом.
15 |
16 |
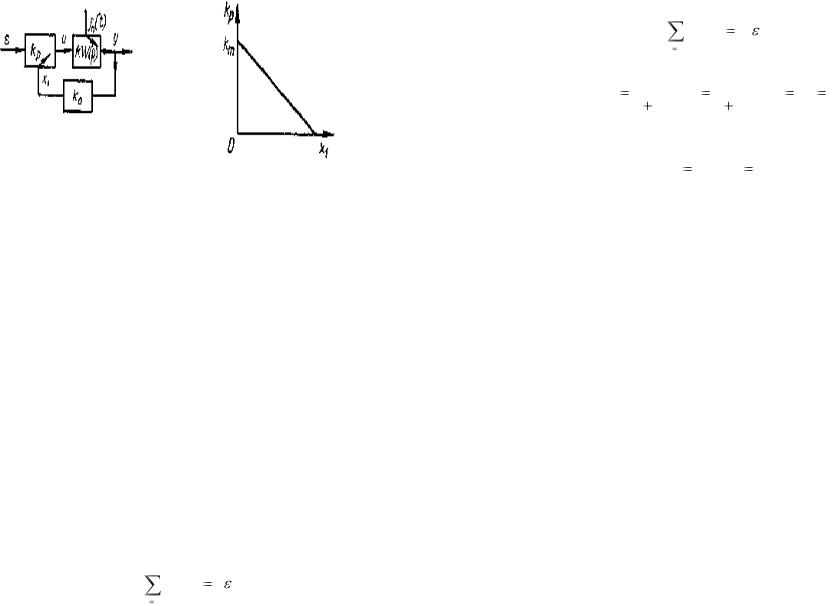
Рис. 1.5.
Компенсация изменений коэффициента передачи объекта k (t) при помощи параметрической обратной связи
Рис. 1.6. Зависимость коэффициента передачи регулятора kp от сигнала на параметрическом входе
1.2. Адаптивные свойства систем с параметрической обратной связью
В системе с обычной обратной связью (рис. 1.1) компенсация влияния изменений параметров объекта на работу системы достигается изменением управляющего воздействия. Однако в широком диапазоне изменений параметров полной компенсации таким путем получить не удается. Для примера проследим влияние изменений коэффициента передачи объекта на характеристики установившегося и переходного режимов.
Рассмотрим случай, когда уравнение прямой цепи системы описывается уравнением
n
a |
i |
y (i) |
k . |
(1.5) |
|
|
|
|
i 0
Тогда уравнение замкнутой системы, представленной на рис. 1.1, будет
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a0 y(i) |
k |
3 |
|
, |
|
(1.6) |
||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
i |
0 |
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ao |
|
|
ai |
|
;k |
|
|
|
|
k |
|
|
;a0 |
a 1; |
|
|
|
|
|
3 |
|
|
|
|
|
|
|||||
i |
1 |
kk0 |
|
1 |
k0k |
0 |
0 |
||||||||
|
|
|
|
|
|
||||||||||
k0 — коэффициент передачи цепи обратной связи. Если система |
|||||||||||||||
астатическая, то |
|
|
|
|
|
|
ai |
|
|
|
|
1 |
|
|
|
|
|
|
a0 |
|
|
, k |
|
|
|
. |
|
||||
|
|
|
|
|
|
3 |
|
|
|
|
|||||
|
|
|
i |
|
|
kk0 |
|
|
k0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Из (1.6) и (1.7) видно, что при больших значениях коэффициента k0k (в случае статической системы) и при произвольных значениях kuk (в случае астатической системы) изменения k не будут влиять на характеристики системы в установившемся режиме при постоянном входном сигнале х= х0. Однако как в первой, так и во второй системах изменения k будут существенно влиять на динамику системы,
так как коэффициенты уравнений ai0 зависимы от k. Это происходит
потому, что компенсация изменений выходного сигнала, вызванных изменениями k (t) в системе с обычной обратной связью, происходит при помощи сигнала и на входе объекта.
Компенсацию изменений у, вызванных параметрическим воздействием, т. е. изменением коэффициента передачи k (t), можно произвести иначе, а именно: путем изменения коэффициента передачи регулятора в соответствии с изменениями коэффициента передачи объекта k так, чтобы произведение
kkp = const. |
(1.7) |
Как было показано выше (1.3а), в случае выполнения условия (1.4) будет стабилизирован не только коэффициент передачи системы, но и другие коэффициенты уравнения (1.3а) и, следовательно, качество процессов будет неизменным.
Процесс изменения коэффициента передачи регулятора в соответствии с изменениями коэффициента передачи объекта можно автоматизировать, применив обратную связь с выхода системы на коэффициент передачи регулятора kp (рис. 1.5).
Прежде чем анализировать работу системы автоматического
17 |
18 |
управления при наличии параметрической обратной связи, выясним основные особенности системы с параметрической обратной связью (ПОС).
В отличие от рассмотренной выше системы с обратной связью по сигналу (рис. 1.1), в системе с ПОС (рис. 1.5) происходит изменение параметров в соответствии с изменением выходной величины системы. В случае изменения только одного коэффициента передачи объекта условие kkp = const можно назвать условием абсолютной адаптивности системы. Выясним возможности его достижения в системах с ПОС (рис. 1.5). Для этого найдем уравнение системы с ПОС на коэффициент передачи, если уравнение прямой цепи будет представлено в виде, аналогичном (1.5):
n |
|
|
|
|
a y(i) |
k |
p |
k . |
(1.8) |
i |
|
|
|
i 0
Не последнее значение имеет выбор зависимости kp (x1), которая определяет собой уравнение замыкания системы.
Наиболее простой зависимостью kp(x1) |
является линейно па- |
дающая (рис. 1.6): |
|
kp = km—k1x1, |
(1.9) |
где km — максимальное значение |
коэффициента переда- |
чи регулятора, x1 — коэффициент наклона.
Благодаря такому выбору kp (t) получаем сравнительно простое уравнение, правильно отображающее основные особенности системы с ПОС и позволяющие получить обозримые результаты. Более того, благодаря такому выбору уравнения замыкания удается сравнивать системы с ПОС и обычной обратной связью по их уравнениям.
Необходимо еще остановиться на формировании цепи обратной связи. Пусть осуществлена жесткая обратная связь с коэффициентом передачи k0. Введем в систему через сумматор (рис. 1.7) сигнал у0 так, чтобы характеристика kp имела вид, указанный на рис. 1.8. В этом случае уравнение цепи обратной связи принимает вид
x1 = y0 ± k0y. |
(1.10) |
Подставляя из (1.10) в (1.9), находим, что |
|
kp = ktn — k1y0 k1k0y0 |
(1.11) |
Втом случае, если в (10. 10) выбирается знак плюс, характеристика (1.11) имеет падающий характер, при отрицательном знаке — возрастающий.
Впоследнем случае при замыкании системы получаем статически неустойчивую систему, поэтому будем в дальнейшем принимать знак плюс в (1.10). После подстановки (1.11) в (1.8) получаем уравнение системы с ПОС в виде
|
|
|
n |
|
|
|
|
|
|
|
a0 y(i) |
k |
3 |
, |
(1.12) |
|
|
|
i |
|
|
|
|
|
|
i |
0 |
|
|
|
|
a0 |
|
|
ai |
;a0 |
|
a 1; |
|
|
|
|
|
||||
i |
1 |
k0kk1x2 |
0 |
|
0 |
||
|
|
|
|
|
|||
k3  k(km k1 y0 ) .
k(km k1 y0 ) .
Полученное уравнение (1.12) замкнутой системы с ПОС, в отличие от уравнения прямой цепи (1.8) и уравнения системы с обычной обратной связью (1.6), в случае, если входной сигнал 8 представляет собой определенную функцию времени  1 (t) , является
1 (t) , является
уравнением с переменными коэффициентами, хотя статическая характеристика, определенная из соотношения (1.12а), является нелинейной (рисунок 1.9).
Выясним, в каком случае изменения k (t) не будут оказывать влияние на коэффициент передачи замкнутой системы, в данном случае k3 = = kkp. Из (1.12) следует, что при kk1 k0x>>1
k3 |
kkp |
km |
k1 y0 |
(1.13) |
|
k0k1x |
|||||
|
|
|
|||
является независимой от изменений k (t).
С другой стороны, как это следует из статической характеристики (рис. 1.9), система в равной степени будет компенсировать и изменения основного, управляющего сигнала T , так как значение выходной величины у не будет зависеть от изменений ai0 .
, так как значение выходной величины у не будет зависеть от изменений ai0 .
19 |
20 |