

Импульсный элемент (иэ) представляется в схеме дельта-функцией
(t – nT) = для t = nT,
(t – nT) = 0 для t nT
с изображением по Лапласу выходного сигнала ИЭ
![]()
Передаточная функция экстраполятора определяется отношением изображений его выходной и входной величин при n = const:
![]() (17)
(17)
Следовательно, прямоугольному импульсу с продолжительностью Т на выходе экстраполятора нулевого порядка
хэ*(t) = 1(t) – 1(t – T)
соответствует изображение
![]()
равное передаточной функции экстраполятора [2], т.е.
![]() (18)
(18)
Экстраполятор совместно с непрерывным звеном (НЗ) составляют приведенное звено (ПЗ) с приведенной передаточной функцией (ППФ)
![]() (19)
(19)
Последний элемент в структурной схеме на рис. 6 означает выделение из временной реакции НЗ или ПЗ на импульсное воздействие значений y(t) в дискретные моменты времени, т.е. выделение решетчатой функции у[п].
Дискретную передаточную функцию (ДПФ) для приведенного звена найдем как z-преобразование выражения (19):
![]() (20)
(20)
Так как 1/р есть изображение единичной функции 1(t) по Лапласу, то WНЗ(p) / p представляет собой изображение переходной функции hНЗ(t) непрерывного звена, т. е. реакции НЗ на единичный скачок. Следовательно,
![]() (21)
(21)
где hHЗ [n] – переходная решетчатая функция НЗ.
2.3. Структурная схема и дискретная передаточная функция для цифрового контура регулирования
Используя полученные структурную схему для звеньев с импульсным входным воздействием и их передаточные функции, можно составить структурную схему и дискретную передаточную функцию для цифрового контура регулирования координаты электропривода с учетом квантования по времени. Приведенная на рис. 7, а структурная схема не учитывает нелинейность от квантованности по уровню.
Непрерывным звеном в данной схеме является объект управления с передаточной функцией Wo.y(p), выходной координатой у которого может быть, например, ток или момент, скорость, положение (угол поворота) электропривода.
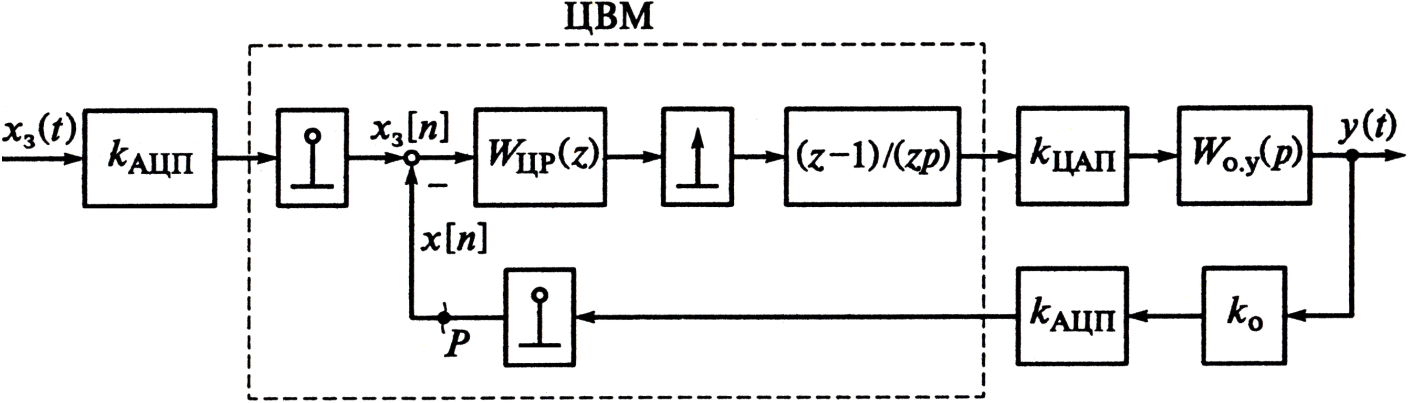
а)

б)
Рис. 7. Развернутая (а) и свернутая (б) структурные схемы цифрового контура регулирования
К ПЗ целесообразно отнести все звенья разомкнутого в точке Р контура с непрерывной передаточной функцией
![]() (22)
(22)
и дискретной
![]() (23)
(23)
где k0 – коэффициент обратной связи.
ДПФ разомкнутого контура
![]() (24)
(24)
где WЦР(z) – ДПФ цифрового регулятора.
В свернутом виде структурная схема цифрового контура регулирования показана на рис. 7, б.
Для определения динамических свойств цифрового контура регулирования решают задачу анализа, т.е. рассчитывают переходную функцию замкнутого контура х[п] = h[n] для хз[n] = 1[п], по которой оценивают перерегулирование и время переходного процесса. Процесс может быть рассчитан на основании ДПФ замкнутого контура
![]() (25)
(25)
с помощью формулы разложения. Однако для получения общего решения для х[п] требуется определение корней характеристического полинома D(z), что в случае высокого порядка полинома является непростой задачей. Без определения корней расчет переходного процесса выполняют численно методом разностных уравнений. Для ДПФ замкнутого контура
 (26)
(26)
где l > т, после деления числителя и знаменателя на zl с учетом теоремы запаздывания можно составить соответствующее (26) разностное уравнение
![]() (27)
(27)
Решая (27) относительно искомой функции х[п], получим рекуррентную формулу, по которой последовательно рассчитываются значения функции х[п] на каждом такте по значениям входной переменной хз на данном такте и по значениям хз и х на предыдущем такте.