

Фгбоу впо “Воронежский государственный технический университет”
Кафедра электропривода, автоматики и управления в технических системах
Исследование цифровой системы управления электропривода методические указания
к лабораторным работам № 1, 2 по дисциплине
“Системы автоматического управления электроприводами” для студентов направления 13.04.02
“Электроэнергетика и электротехника”
(магистерская программа подготовки “Электроприводы и системы управления электроприводов”)
очной формы обучения

В
Составитель канд. техн. наук В.А. Медведев
УДК 007(075.8)
Исследование цифровой системы управления электропривода: методические указания к лабораторным работам № 1, 2 по дисциплине “Системы автоматического управления электроприводами” для студентов направления 13.04.02 “Электроэнергетика и электротехника” (магистерская программа подготовки “Электроприводы и системы управления электроприводов”) очной формы обучения / ФГБОУ ВПО “Воронежский государственный технический университет”; сост. В.А. Медведев. Воронеж, 2015. 25 с.
Методические указания содержат теоретические сведения о расчетных моделях цифровой системы управления электропривода с учетом дискретности по уровню, ее математическом описании на основе теории импульсных систем, режимах стабилизации скорости двигателя. Сформулированы предварительное и рабочее задания на лабораторные работы, требования к содержанию отчета и контрольные вопросы.
Методические указания предназначены для студентов 6 курса очной формы обучения.
Методические указания подготовлены в электронном виде в текстовом редакторе Microsoft Word 2003 и содержатся в файле МУ_лаб 1-2_САУ ЭП.doc
Табл. 3. Ил. 8. Библиогр.: 2 назв.
Рецензент канд. техн. наук, доц. А.П. Харченко
Ответственный за выпуск зав. Кафедрой д-р техн. Наук, проф. В.Л. Бурковский
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
 с
ФГБОУ ВПО “Воронежский
с
ФГБОУ ВПО “Воронежский
г
Лабораторная работа № 1
ИССЛЕДОВАНИЕ ЦИФРОВОЙ СИСТЕМЫ В РЕЖИМЕ СТАБИЛИЗАЦИИ СКОРОСТИ ПО УРОВНЮ ПРОТИВО-ЭДС
1. Цель работы
Изучение математического описания цифровых систем управления с учетом их дискретности. Исследование цифровой системы управления электропривода постоянного тока в режиме стабилизации скорости по уровню противо-ЭДС.
2. Теоретические сведения
2.1. Понятие цифровой системы управления электропривода
К цифровым системам управления (ЦСУ) относятся системы, состоящие из цифровых элементов. Термин «цифровой элемент» (ЦЭ) означает определенную конструктивную электротехническую единицу дискретного действия, выполняющую различные функции – логические, вычислительные, преобразовательные, запоминания сигналов. В составе ЦСУ цифровые элементы образуют узлы, выполняющие те или иные задачи управления. На рис. 1 приведена схема ЦСУ некоторой координатой х электропривода, где ЦЗУ – цифровое задающее устройство, ЦС – цифровой сумматор, ЦР – цифровой регулятор, ЦАП – цифроаналоговый преобразователь, АЦП – аналогово-цифровой преобразователь, УП-Д – система управляемый преобразователь–двигатель, в которой УП является выходной исполнительной частью СУЭП. Заглавными латинскими буквами обозначены многоразрядные цифровые сигналы.
Входной цифровой сигнал хз0
устанавливает исходные параметры для
х3, например,
![]() что означает для выходной управляемой
координаты электропривода х,
например, для перемещения, соответственно
заданные значения перемещения, максимально
допустимых скорости и ускорения.
что означает для выходной управляемой
координаты электропривода х,
например, для перемещения, соответственно
заданные значения перемещения, максимально
допустимых скорости и ускорения.
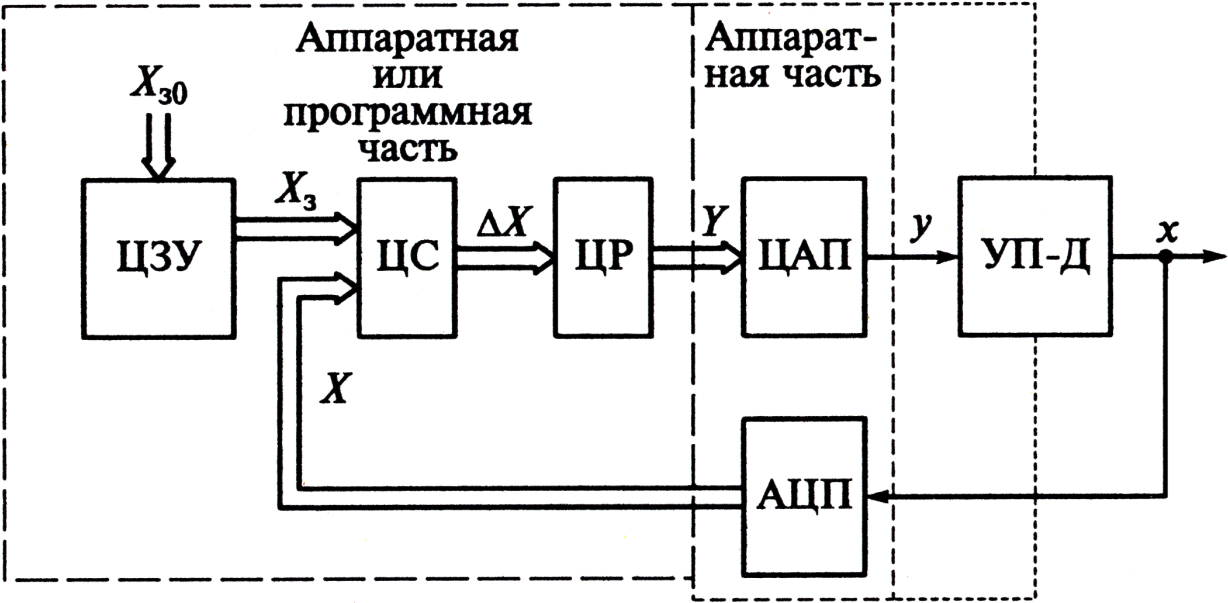
Рис. 1. Схема цифровой системы управления одной координатой электропривода
Данная схема ЦСУ по своей структуре аналогична непрерывной СУЭП [1] с теми же функциональными узлами, кроме ЦАП и АЦП, но выполненными на аналоговых элементах. Достоинства ЦСУ определяются достоинствами цифровых элементов по сравнению с аналоговыми – большими помехоустойчивостью и точностью датчиков скорости и положения, простотой и удобством цифрового задания программы на движения электропривода, неуклонной тенденцией к снижению габаритов и стоимости ЦЭ, к повышению надежности и степени интеграции цифровых узлов.
Функциональные узлы ЦСУ, показанные на рис. 1, могут быть реализованы двояко:
аппаратно – каждый функциональный узел представляет собой самостоятельный отдельный блок в составе ЦСУ, выполненный на микросхемах малой и средней степени интеграции;
программно – функциональные узлы выполняются на едином универсальном цифровом устройстве – микроконтроллере и алгоритм их функционирования определяется программой работы этого устройства.
Для изменения алгоритма управления ЦСУ при аппаратном способе требуется замена и соответствующих блоков управления. При программном способе для изменения алгоритма управления требуется лишь изменение программы на той же элементной базе. Такие ЦСУ находят широкое применение в электроприводах производств, где возможны изменения технологических процессов, следовательно, требуются изменения и в задачах управления верхнего уровня. Благодаря быстрому совершенствованию современной технологии изготовления микропроцессорных устройств, повышению их качества и снижению стоимости программный способ управления как верхнего, так и нижнего уровней все шире внедряется в системы управления электроприводов.
Цифровые системы управления электроприводов (ЦСУЭП) отличаются от непрерывных систем управления электроприводов, главным образом, элементной базой, ее дискретностью по уровню сигналов и по времени их действия. ЦСУЭП, как и непрерывные СУЭП, формируют те же требуемые задачами управления алгоритмы, используют те же методы управления – модального управления, подчиненного регулирования, последовательной и параллельной коррекции и т.п. Однако в реализации алгоритмов управления может проявляться дискретность ЦСУЭП, отражающаяся на динамических и точностных показателях электропривода. Поэтому рассмотрим способы учета дискретностей ЦСУЭП при синтезе цифровых регуляторов.