

Раздел №1 пм.01 Техническая эксплуатация судового электрооборудования и средств автоматики
1.1 «Устройство и эксплуатация судовых электрических машин»
устройства для преобразования механической энергии в электрическую и обратно. Электрические машиныделятся на два основных вида: генераторы и электродвигатели. Конструктивно Электрические машинысостоят из неподвижной и вращающейся системы катушек, намотанных на сердечники из ферромагнитногоматериала. Вращающаяся часть Электрической машины называется ротором или якорем, неподвижная часть— статором. На судах применяются электрические машины переменного и постоянного тока. В качествегенераторов переменного тока используются синхронные генераторы, на роторе которых расположенаобмотка возбуждения, питающаяся постоянным током. Магнитный поток, создаваемый током возбуждения, образует при вращении ротора напряжение в обмотке статора, которое подается на главныйраспределительный щит (ГРЩ) и дальше — судовым потребителям. Ротор генератора приводится вовращение механическим первич-ным двигателем (например, дизелем). Генератор постоянного токаотличается от синхронного тем, что его обмотка возбуждения расположена на статоре, а ротор (якорь) подключен к коллектору, представляющему собой электромеханический выпрямитель. Ток нагрузки снимаетсяс контактных щеток. Генераторы на судах часто работают параллельно. В этом режиме между синхроннымигенераторами необходимо распределять активную и реактивную нагрузки. Суммарная активная нагрузка всехпараллельно работающих генераторов определяется суммой всех активных составляющих токовпотребителей, т. е. тех частей нагрузки, которые преобразуются либо в теплоту, либо в механическую работу. Доля активной нагрузки каждого из параллельно работающих генераторов зависит от настройки регуляторачастоты вращения первичного двигателя соответствующего генератора. При одинаковой настройкегенераторы будут иметь равные величины активной нагрузки. Если в случае аварии первичный двигательодного из генераторов прекратит преобразование энергии топлива в активную мощность электрогенератора, то последний сбросит нагрузку и перейдет в двигательный режим. Соответственно активная мощностьгенератора называется обратной мощностью. Режим двигательной нагрузки на судах не допускается, поэтому генератор отключается от ГРЩ специальнойзащитой от обратной мощности. Суммарная реактивная нагрузка параллельно включенных синхронныхгенераторов определяется суммой реактивных токов потребителей, т. е. таких составляющих общего тока, которые служат только для создания магнитных полей обмоток асинхронных двигателей, генераторов и др. электромагнитных элементов. Доля реактивной нагрузки каждого генератора устанавливается настройкой егорегулятора напряжения. Реактивные токи увеличивают вредные тепловыделения электрооборудования засчет нагрева проводов и кабелей, поэтому конструкторы электрических машин стремятся снизить эти токи довозможного минимума. К судовым генераторам переменного тока предъявляются требования по качествунапряжения, в т. ч. по точности соответствия синусоиде формы кривой мгновенных значений тока инапряжения. Искажение формы (величина отклонения от синусоиды) не должно превышать несколькихпроцентов. Нагрузка в виде управляемых выпрямителей или инверторов искажает форму кривой переменноготока генераторов и вызывает пульсации напряжения генераторов постоянного тока, что может неблагоприятноотразиться на работе судовых потребителей. Наиболее распространенным видом электродвигателя на судахявляется трехфазный асинхронный короткозамкнутый двигатель переменного тока. На его статоре размещенаобмотка, подключаемая к сети, а обмотка ротора представляет собой цилиндр из магнитного материала сзаложенными в пазы алюминиевыми стержнями, замкнутыми накоротко. Вращающий моментэлектродвигателя создается в результате взаимодействия потока обмотки статора и токов, наведенных вобмотке ротора. Частота вращения двигателя зависит от частоты сети и схемы обмоток. В многоскоростныхдвигателях на статоре располагаются 2 — 4 обмотки. Электродвигатель постоянного тока кроме обмотокстатора и ротора имеет коллектор со щетками. Применяют также вентильные двигатели, в которыхколлекторный аппарат заменен тиристорным переключателем. Двигатели постоянного тока большоймощности, например гребные, выполняются с 2 обмотками якоря и соответственно с 2 коллекторами дляуменьшения нагрузки. Включение напряжения на электродвигатели при пуске производится с помощьюконтактора — аппарата, подобного электромагниту. При подаче питания в катушку контактора происходитсближение контактов электрической цепи двигателей. Контактор с др. элементами пусковой схемы образует т. н. пускатель. Для ограничения пускового тока электродвигателей в их цепи включают пусковые сопротивления.
1.2 «Устройство и эксплуатация судовых электроэнергетических систем»
Судовая электроэнергетическая система – это совокупность судовых устройств, предназначенная для производства, преобразования, распределения электроэнергии и питания ею судовых приемников (потребителей). СЭЭС состоит из трех основных частей: судовые электрические станции, силовая электрическая сеть и сеть приемников.
1.3 «Устройство и эксплуатация судовых электроприводов»
Судовые электроприводы являются основными потребителями электроэнергии, вырабатываемой судовой ЭЭС. История развития судового электропривода, начатая в 1838 г. академиком Б.С. Якоби, продолжилась внедрением на ряде крейсеров российского флота – в 1886 г. корабли были оборудованы электровентиляторами. Первый электропривод рулевого устройства был использован на крейсере «Двенадцать апостолов» в 1892 г., а первая отечественная грузовая электролебедка была установлена на транспортере «Европа» в 1897 г. На протяжении следующих 6–8 лет электрифицируются якорные устройства, насосы, воздуходувки, компрессоры, установки вооружения. В 1904 г. на Сормовском заводе были спущены на воду дизель-электроходы «Вандам» и «Сармат». Первые судовые электроприводы выполнялись исключительно на постоянном токе напряжением, не превышающем, как правило, 110 В. С 1908 г. начинается внедрение судовых электроприводов переменного тока. На минном загородителе «Амур» устанавливаются трехфазные электродвигатели вентиляторов и водоотливных насосов. В 1914 г. на линкорах «Императрица Екатерина Великая» и «Императрица Мария» полностью электрифицируются вспомогательные механизмы с применением электроприводов переменного трехфазного тока. В период с 1960-го по 1970-е гг. осуществляется переход к использованию на судах электроэнергии преимущественно переменного тока. Важную роль в этом сыграло внедрение многоскоростных асинхронных электродвигателей (серия МАП). В настоящее время обеспечивается автоматическое управление электроприводами с использованием современной полупроводниковой техники. По мере развития судовых электроприводов наблюдается переход от автоматизации отдельных операций к комплексной автоматизации судовых энергетических систем. В системы управления электроприводом все чаще включаются вычислительные машины, микропроцессоры, с большой точностью осуществляющие операции управления, ранее выполняемые человеком. ^ 2.1. Определение и классификация электроприводов Электропривод – это управляемая электромеханическая система, осуществляющая преобразование электрической энергии в механическую и наоборот. Электропривод состоит из преобразовательного устройства, электродвигателя, механической передачи и управляющего устройства, а его функциональная схема может быть представлена в следующем виде (рис. 2.1).
|
|
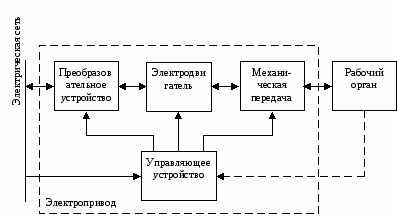
Рис. 2.1. Функциональная схема электропривода Преобразовательное устройство предназначено для преобразования вида электроэнергии (переменного тока в постоянный или наоборот) и ее регулирования (электромашинные, тиристорные, частотные и другие преобразователи). Электродвигатель выполняет роль электромеханического преобразователя, преобразуя подводимую к нему электрическую энергию в механическую. Электродвигатели делятся на машины постоянного и переменного тока. Механическая передача предназначена для преобразования параметров движения (уменьшения, увеличения частоты вращения, преобразование вращательного движения в поступательное и т.д.). К этим устройствам относятся: редукторы, коробки передач, цепные, ременные, винтовые передачи, барабан с тросом, передача винт-гайка, кривошипно-шатунный механизм и т.д. Управляющее устройство представляет собой систему управления электроприводом, обеспечивающую ему достаточную степень управляемости и регулирования основных параметров движения. В составе электропривода могут отсутствовать преобразовательное устройство (двигатель питается непосредственно от сети), или механическая передача (у вентилятора крыльчатка насажена на вал двигателя). Электроприводы можно разделить на одиночные и многокоординатные. Одиночным называется электропривод, в котором рабочий орган машины приводится в действие одним электродвигателем (электропривод шпиля). Многокоординатным или многодвигательным называют электропривод, в котором каждый из рабочих органов машины приводится в движение отдельным электродвигателем. Так в электроприводе грузоподъемного крана механизмы поворота платформы, вылета стрелы и подъема груза приводятся в движение своим электродвигателем. Применение многокоординатного электропривода упрощает кинематическую схему и конструкцию электромеханической системы. По способу управления электроприводы делят на неавтоматизированные, автоматизированные и автоматические. Неавтоматизированный электропривод предусматривает участие человека в выработке управляющих воздействий и компенсации последующих возмущений. Автоматизированный электропривод требует участия человека только в выработке начального управляющего воздействия. Автоматическим считается электропривод, где роль человека сводится лишь к наблюдению за работой электромеханической системы. По роду тока различают электроприводы постоянного и переменного тока. Судовые электроприводы, приводящие в действие судовые механизмы, делятся на рулевые, якорно-швартовные, грузоподъемные, вспомогательные (электроприводы, обслуживающие механизмы главной силовой установки судна).
1.4 «Системы автоматического регулирования и датчики системы судовой автоматики»
Все элементы автоматики по характеру и объему выполняемых операций подразделяют на системы: автоматического контроля, автоматического управления, автоматического регулирования.
Система автоматического контроля (рис. 1) предназначена для контроля за ходом какого-либо процесса. Такая система включает датчик В, усилитель А, принимающий сигнал от датчика и передающий его после усиления на специальный элемент Р, который реализует заключительную операцию автоматического контроля — представление контролируемой величины в форме, удобной для наблюдения или регистрации.
В частном случае в качестве исполнительного элемента Р могут служить сигнальные лампы или звуковые сигнализаторы. Систему с такими элементами называют системой сигнализации.

Рис. 1. Система автоматического контроля
В систему автоматического контроля кроме указанных на рис. 1, а могут входить и другие элементы - стабилизаторы, источники питания, распределители (при наличии нескольких точек контроля или нескольких датчиков в одном исполнительном элементе Р) и т. д.
Независимо от количества элементов системы автоматического контроля являются разомкнутыми и сигнал в них проходит только в одном направлении — от объекта контроля Е к исполнительному элементу Р.
Система автоматического управления предназначена для частичного или полного (без участия человека) управления объектом либо технологическим процессом. Эти системы широко применяют для автоматизации, например, процессов пуска, регулирования частоты вращения и реверсирования электродвигателей в электроприводах всех назначений.
Необходимо указать на такую важную разновидность систем автоматического управления, как системы автоматической защиты, которые не допускают аварийного или предельного режима, прерывая в критический момент контролируемый процесс.
Система автоматического регулирования поддерживает регулируемую величину в заданных пределах. Это наиболее сложные системы автоматики, объединяющие функции автоматического контроля и управления. Составная часть этих систем - регулятор.
Если системы выполняют только одну задачу — поддерживают постоянной регулируемую величину, их называют системами автоматической стабилизации. Однако существуют такие процессы, для которых необходимо изменять во времени регулируемую величину по определенному закону, обеспечивая ее стабильность на отдельных участках. В этом случае автоматическую систему называют системой программного регулирования.
Для обеспечения постоянства регулируемой величины можно использовать один из принципов регулирования - по отклонению, возмущению или комбинированный, которые будут рассмотрены применительно к системам регулирования напряжения генераторов постоянного тока.
1.5 «Системы автоматизации судовых технических средств»
Автоматизация судовых систем. К числу наиболее а зированных судовых систем относится система кондици ния воздуха. В этой системе применяют, как правило, цент кондиционеры и местные воздухораспределители с автомат регулированием температуры и влажности воздуха, подг в обслуживаемые помещения.
Холодильные установки системы кондиционирования i охлаждения провизионных камер и грузовых трюмов реф} торных судов автоматически поддерживают заданный темп ный режим в помещениях.
В системе водоснабжения автоматизируется пуск под ющих насосов, поддерживающих заданный уровень воды ние) в расходных пневмоцистернах; в системе горячей мь воды автоматически поддерживается определенная темпе} В сточной системе автоматизируется работа фекальных н водоструйных эжекторов или системы продувания, предна; ных для удаления грязных вод из сточных цистерн г заполнении.
Автоматизация судовождения.
Технически задачу автоматизации отдельных звеньев управления судном можно считать уже решенной. В частности, широко применяются авторулевые, т. е. приборы, обеспечивающие автоматическое ведение судна по заданному курсу и позволяющие примерно на 3 % сократить продолжительность рейса и сэкономить топливо. Авторулевые работают главным образом от гирокомпаса, однако уже созданы авторулевые, действующие и от магнитного компаса (их используют на малых судах, не имеющих гирокомпаса). Принцип устройства авторулевого основан на автоматическом включении рулевого устройства при отклонении судна от заданного курса и отключении его при возвращении судна на курс. Для автоматической прокладки фактического пути судна по морской карте служит специальный прибор — автопрокладчик.
Наличие береговых и спутниковых навигационных радиостанций дает возможность автоматизировать определение географических координат судна. Кроме того, существующие приборы уже позволяют автоматически получать данные о скорости, глубинах, препятствиях, встречающихся под водой и над водой. Все эти данные вводятся в специальную навигационную цифровую вычислительную машину (НЦВМ), которая уже сама рассчитывает по ним место судна, направление и расстояние до пункта назначения, снос и дрейф и подает команду «курс» авторулевому. Известную трудность представляет автоматизация судовождения при следовании в узкостях, в местах с повышенной опасностью, при швартовке, но и она технически вполне разрешима.
Наличие на автоматизированных судах электронно-вычислительной машины позволяет автоматизировать решение и других задач, с которыми приходится сталкиваться во время эксплуатации судна: выбор наиболее выгодной загрузки судна (каргоплана), расчеты балластировки, остойчивости и непотопляемости судна, оптимизация режима работы главной энергетической установки, выполнение расчетов финансово-экономических показателей работы судна и т. п.
1.6 «Основные сведения о ремонте и обслуживании судового электрооборудования и средств автоматики. Техническая диагностика электрооборудования»
ТО № 1 предусматривает повседневный контроль за падежной работой электрооборудования ответственного назначения и периодический контроль за остальным оборудованием.
При ТО № 1 производится:
а) контроль за чистотой внешних поверхностей;
б) внешний осмотр;
в) проверка работоспособности редко используемого электрооборудования, а также электрооборудования механизмов и устройств ответственного назначения перед выходом в рейс и т. д.
г) контроль сопротивления изоляции по щитовым приборам.
При осмотре электрических машин необходимо контролировать:
а) уровень шума (на слух);
б) величину нагрева;
в) надежность крепления кабелей на выводах;
г) плотность закрытия крышек.
При осмотре контроллеров и командоаппаратов необходимо следить:
я) за легкостью хода;
б) за фиксацией положений.
При осмотре аккумуляторных батарей необходимо контролировать:
а) целость корпусов;
б) чистоту межэлементных соединений;
в) нагрев, не допуская превышения допустимого;
г) величину напряжения (по щитовому вольтметру).
При осмотре реле, контакторов, автоматических выключателей необходимо следить
а) за гудением и нагревом аппаратов;
б) за исправностью дугогаснтельных камер.
При осмотре машинных и рулевых телеграфов электрических тахометров, приборов контроля трнческих величин необходимо проверять:
а) плотность закрытия всех приборов;
б) состояние влагопоглотнтеля;
в) правильность работы сигнальных реле;
г) целость корпусов;
д) легкость хода ручек управления и настройки;
е) фиксацию положения переключателей и ручек;
ж) целость ламп сигнализации и подсветки приборов.
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ № 2
ТО № 2 заключается в проверке исправности электрооборудования, в установлении соответствия технических параметров нормам, в контроле за состоянием трущихся к токопроводящих частей, в замене изношенных деталей, в проведении регулировок, настроек и других мероприятий для обеспечения работоспособности электрооборудования. (Например, проверка состояния и крепления кабельных трасс, одиночных кабелей и проводов, проверка надежности крепления аппаратуры, надежности контактных соединений кабелей питания электрооборудования механизмов и устройств и т. п.).
Электрические машины:
а) проверить состояние и очистить доступные места обмоток роторов (якорей) и статоров (полюсов) от пыли и грязи;
б) очистить щеткодержатели и пальцы траверсы;
в) очистить коллектор (кольца);
г) проверить состояние и нажатие щеток, искрение под ними;
д) проверить состояние передачи (муфт, ремней и т. п.);
е) проверить разборные выводные и крепежные соединения;
ж) проверить состояние электромагнитных и механических тормозов и конечных выключателей.
Аппаратура систем самовозбуждения и саморегулирования и статических регуляторов напряжения генераторов:
а) осмотреть трансформаторы тока, реакторы, трансформаторы напряжения, магнитные усилители, комплект силовых выпрямителей, конденсаторы и т. д.;
б) обтереть чистой ветошью доступные поверхности элементов;
в) проверить чистоту вентиляционных каналов;
г) проверить состояние контактов;
д) проверить крепление катушек трансформаторов, магнитных усилителей и т. д.;
е) проверить затяжку пакетов стали в сердечниках трансформаторов, реакторов и т. д.;
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ № 3
ТО № 3 проводится только для электрических машин и заключается в проверке состояния всего устройства, в том числе, его труднодоступных мест.
Электрические машины:
а) провести полную разборку машины;
б) промыть обмотки волосяной или подобной по свойствам щеткой, смоченной в рекомендованном моюшем средстве, и продуть сжатым воздухом (см. приложение 4);
в) промыть подшипники;
г) проверить состояние подшипников;
д) набить подшипники новой смазкой;
е) покрыть (при необходимости) обмотки изоляционной эмалью н просушить;
ж) проверить состояние крепежных деталей;
з) изменить полярность контактных колец у синхронных генераторов (поменять местами проводники, подходящие к траверсам щеткодержателей) через 2000--3000 ч работы, но не реже чем через 3 года;
и) собрать машину;
к) проверить равномерность воздушного зазора в машине после центровки с механизмом;
л) проверить работоспособность машины на холостом ходу и под нагрузкой, обращая внимание на отсутствие ненормального шума, вибрации, искрения.
Перечень электрических машин, для которых ТО № 3 'выполняется во время навигации, устанавливается предприятиями-- судовладельцами с учетом условий работы судна, наличия в штате судна электротехнического персонала, возможности привлечения электроцехов и БПУ, организации агрегатного ремонта.
1.7 «Эксплуатация судового электрооборудования и средств автоматики»
Судовой электромеханик (помощник механика по электрооборудованию судна) - сегодня одна из ответственных технических специальностей на речном транспорте.
Это специалист, обладающий необходимыми теоретическими знаниями и практическими навыками по эксплуатации судового электрооборудования, который осуществляет его обслуживание, отвечает за его состояние, работоспособность и безотказность. Он не только следит за бесперебойной и четкой работой подведомственного ему электротехнического хозяйства, но и участвует в необходимых эксплуатационных ремонтных и профилактических мероприятиях по поддержанию электрооборудования в исправном состоянии и постоянной готовности к работе.
Судовое электрооборудование, находящееся в ведении электромеханика, весьма разнообразно, а электрические системы управления достаточно сложны. Поэтому электромеханик должен хорошо знать доверенное ему хозяйство, чтобы никакие непредвиденные отказы электрооборудования не застали его врасплох. В аварийных ситуациях надо уметь быстро принимать правильные решения, действовать решительно и умело. Ведь от исправности и бесперебойности работы электрических установок зависит безопасность людей и судна.
Вполне понятно, что для уверенного и добросовестного исполнения своих обязанностей и творческого отношения к труду электромеханик должен хорошо освоить свою специальность, приобрести определенные знания и устойчивые практические навыки.
Рабочим местом судового электромеханика является главный распределительный щит, который предназначен для управления работой генераторов и распределения электроэнергии по всему судну. На щите располагается коммутационная, защитная, сигнальная и регулировочная аппаратура. Измерительные приборы, установленные на главном распределительном щите, осуществляют контроль за качеством (напряжение, частота) и количеством (ток, мощность) распределяемой энергии. Для работы судовых электромехаников создаются определенные микроклиматические условия, так как колебания температуры, вибрация судна, качка, ограниченные размеры помещения не безразличны для организма человека. Вахта судовых электромехаников продолжается 4 часа, промежуток между вахтами - 8 часов. Выбирая профессию помощника механика по электрооборудованию судов или судового электромеханика, следует учитывать, что работа на речном судне имеет некоторые специфические особенности: сезонный характер труда, отрыв от дома в период навигации, сменные вахты, работа без выходных дней, круглосуточное пребывание в одном и том же немногочисленном коллективе.
Судно для электромеханика является и домом, и местом работы. Здесь он отдыхает после вахты, участвует в различных спортивных соревнованиях, читает, занимается самообразованием.
1.8 «Ремонт судового электрооборудования»
1 Виды ремонта. Характеристика ремонтов, последовательность проведения
ремонтных операций.
2 Дефектация судового электрооборудования – предварительная и окончательная.
Демонтаж и разборка, требования по отключению и маркировке кабелей и проводов.
3 Техническая документация – эксплуатационная и ремонтная.
4 Измерение сопротивления изоляции электрических машин, кабелей,
трансформаторов, распределительных устройств с помощью мегаомметров; их
модификации. Факторы, влияющие на сопротивление изоляции.
5 Электротехнические материалы, применяемые при ремонтных работах.
Проводниковые материалы с высокой проводимостью и с высоким удельным
сопротивлением. Электроизоляционные материалы (диэлектрики) – их свойства и
классификация. Классы изоляции.
6 Наиболее типичные и часто встречающиеся дефекты, выявленные при работе
электрических машин – повышенная вибрация, ненормальный шум, перегрев
машины, понижение сопротивления изоляции и другие. Причины, их вызывающие.
7 Ремонт электрических машин – разборка, очистка, промывка, сушка. Пропитка
обмоток эл. машин электроизоляционными лаками и эмалями. Дефектация
подшипников, их снятие и установка на вал электрической машины.
8 Ремонт судовых электрических аппаратов. Контактные поверхности – обработка и
восстановление, проверка нажатия контактов. Характерные признаки неисправ-
ностей электрических аппаратов, выявление причин и устранение дефектов.
9 Ремонтные работы в электрических сетях. Выбор типа кабеля или провода, а
также его сечения для ремонта объектов силовой или осветительной сети, в цепях
сигнализации и связи, переносного электрооборудования. Условия прокладки
кабелей взависимости от назначения помещений и пространств.
10Ввод кабелей и проводов в электрооборудование, оконцевание кабелей,
заземление их металлических оболочек.