

СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
Исходя из характера протекания процесса управления, требования к системе формируются по следующим показателям:
—точность; (Точность системы в установившихся режимах)
—устойчивость; (Затухание переходного процесса)
—качество переходного процесса.
Пути обеспечения заданного качества работы САР в переходном и установившемся режимах:
— введение в прямую цепь усилителя с таким коэффициентом усиления, который рационально влиял бы на качество, как в переходном, так и в установившемся режимах;
Увеличение Кп– это способ повышения точности системы, при этом уменьшаются все виды установившихся ошибок системы.
Увеличение Кп ведет к ухудшению условия устойчивости, а значит, и качества переходного процесса. При некотором Кп> Ккр (критическое значение) система становится неустойчивой.
—введение в прямую цепь интеграторов для обеспечения заданной точности работы САР в установившемся режиме:
—введение в прямую и обратную цепи системы дифференцирующих звеньев для обеспечения заданного качества работы в переходном режиме.
Увеличение Кп целесообразно делать одновременно с введением производной
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
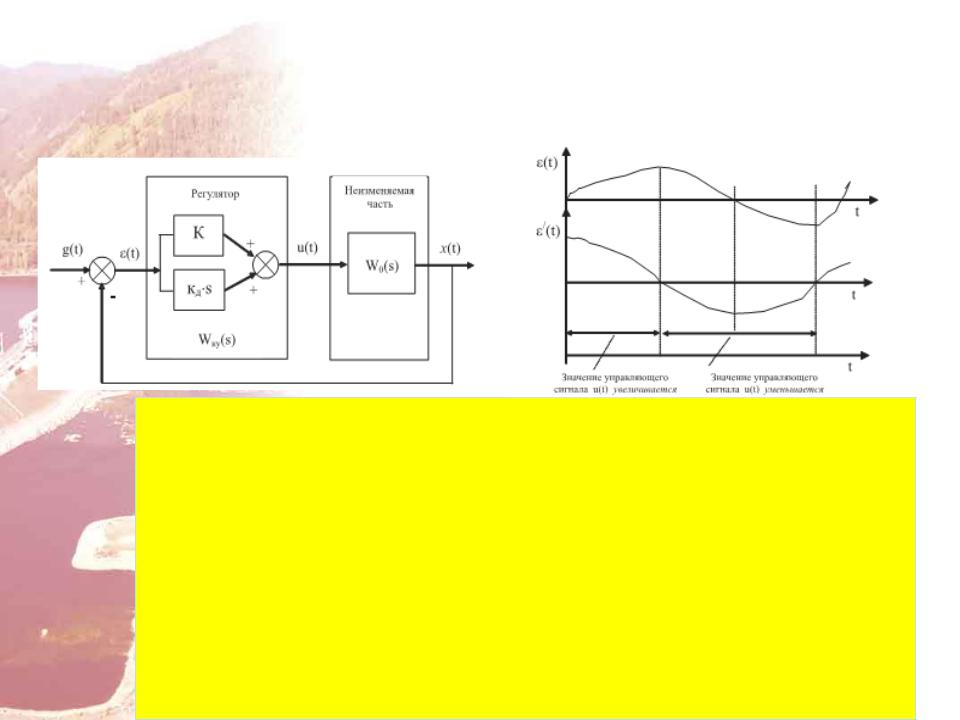
Из-за наличия дифференцирующего звена регулятор формирует сигнал управления u(t) с прогнозом: если амплитуда ε(t) увеличивается, производная εI(t) положительна и значение сигнала u(t) увеличивается. С момента уменьшения сигнала ε(t) сигнал εI(t) и сигнал u(t) интенсивно уменьшается .
Чаще всего производная вводится не в чистом виде, а с инерционностью. При введении воздействия по производной осуществляется положительный сдвиг по фазе, увеличивая тем самым запас устойчивости и улучшая качество переходного процесса.
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
Введение интеграла от ошибки представляет собой метод повышения порядка астатизма системы, а значит, и увеличения ее точности. Однако при этом осуществляется отставание (отрицательный сдвиг) по фазе на –90о, что ухудшает условия устойчивости и качество переходного процесса. Если регулирование с воздействием по производной сигнала рассогласования снижает динамические ошибки системы, то введение дополнительного воздействия по интегралу сигнала рассогласования приводит к уменьшению статических ошибок систем. Для осуществления коррекции последовательно со звеньями системы включают интеграторы.
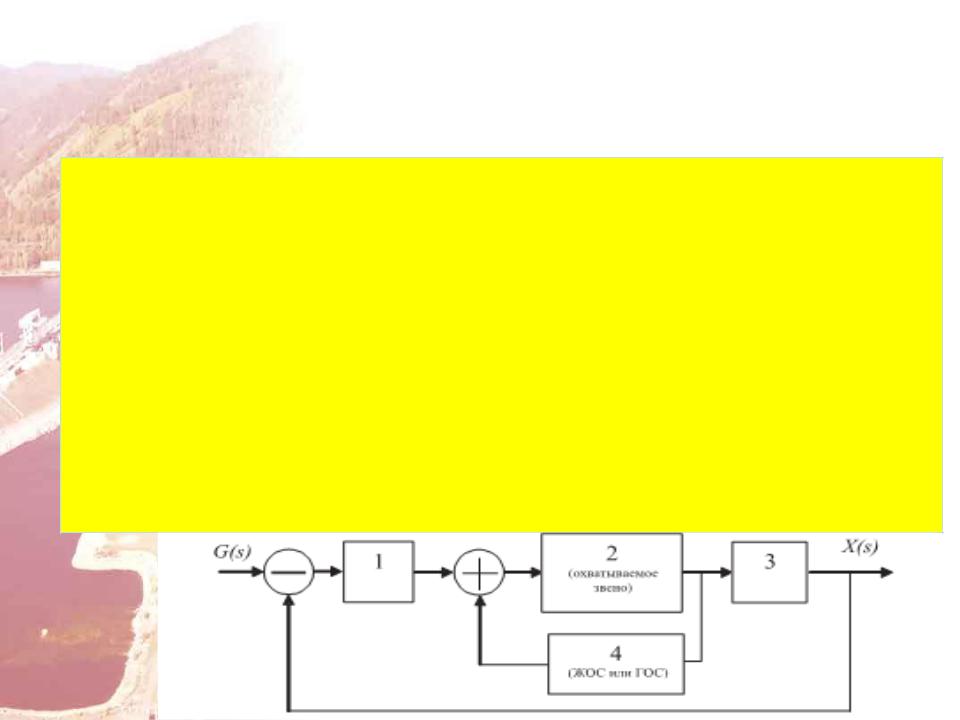
Для улучшения САР применяются местные обратные связи (ОС ), параллельно звеньям контура регулирования. Основные виды ОС:
-жесткая ОС - используются только безинерционные элементы (действует на систему как в переходном, так и установившемся режимах);
-инерционная жесткая ОС; -гибкая ОС – зависит от скорости изменения (только в переходных режимах); -инерционная гибкая ОС.

СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
ПРОПОРЦИОНАЛЬНЫЕ РЕГУЛЯТОРЫ
Пропорциональные регуляторы и имеют один параметр настройки – коэффициент передачи kp.
Переходные процессы в П-регуляторе описываются выражением u = kр ε.
Здесь ε – входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения; u – воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения.