

Методы синтеза систем автоматической стабилизацииции и позиционирования
.pdfтребованиям: |
1) |
максимальне |
відносне відхи- |
1) максимальное относительное лення у сталому режимі функціо- |
|||
отклонение в установившемся режиме |
нування |
|
|
функционирования |
|
|
|
δmax = 5 % ; |
|
|
|
2) максимальное время пере- |
2) |
максимальний |
час перехідного |
ходного процесса |
процесу |
|
|
tппmax = 3 c ; |
|
|
|
3) максимальное перерегулиро- |
3) максимальне перерегулювання |
||
вание |
|
|
|
σmax
Сформированные исходные данные позволяют перейти далее к решению задачи синтеза системы автоматической стабилизации угловой скорости тангажа самолета.
= 20 % .
Сформовані вихідні дані дозволяють перейти далі до вирішення задачі синтезу системи автоматичної стабілізації кутової швидкості тангажа літака.
Выбор желаемой частоты среза |
Вибір бажаної частоти зрізу |
разомкнутой системы. |
розімкненої системи. |
Рассмотрим общий случай метода модального управления по выходу. Структурная схема такой системы изображена на рис. 4.20.
Розглянемо загальний випадок методу модального керування за виходом. Структурну схему такої системи зображено на рис. 4.20.
Рис. 4.20. Структурная схема САС |
Рис. 4.20. Структурна схема САС |
с ПИД КЭ |
з ПІД КЕ |
Будем использовать для коррекции динамических свойств системы передаточную функцию КЭ с ПИД структурой (4.15):
W(s) = Uк (s) = кдs2 + кпs + ки .
кU (s) s
Составляющие ПИД КЭ вводятся в
целях:
1) пропорциональная – для увели-
Будемо використовувати для корекції динамічних властивостей системи передавальну функцію КЕ з ПІД структурою (4.15):
W(s) = Uк (s) = кдs2 + кпs + кi .
кU (s) s
Складові ПІД КЕ уводяться з метою:
1) пропорційна – для збільшення
149

чения быстродействия САС;
2)интегральная – для обеспечения точности системи;
3)дифференциальная – для уменьшения колебательности.
Сначала рассмотрим влияние выбранной структуры корректирующего элемента на величину установившейся ошибки в замкнутой системе автоматической стабилизации от задающего и возмущающего воздействий.
Для этого согласно рис. 4.19 запишем соответствующие передаточные функции для ошибки:
1)по задающему воздействию
Фu (s) =
= |
1 |
= |
1 + Wк (s) Wсп (s) WлА (s) Wдус (s) |
швидкодії САС;
2)інтегральна – для забезпечення точності системи;
3)диференціальна – для зменшення коливальності.
Спочатку розглянемо вплив обраної структури коригувального елемента на величину сталої похибки у замкненій системі автоматичної стабілізації від задавального та збурювального діянь.
Для цього згідно з рис. 4.19 запишемо відповідні передавальні функції для похибки:
1)за задавальним діянням
U (s) =
Uз (s)
= |
|
|
1 |
|
|
= |
1 + W |
(s) W |
(s) W |
(s) W |
(s) |
||
|
к |
сп |
лА |
дкш |
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
s(T22s2 + 2ξT2s + 1) |
, |
|
|
|
|
|
|
|
|
(4.36) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
3 |
s3 |
+ a |
2 |
s2 |
+ a s + a |
0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где a |
3 |
= T2 |
+ к |
сп |
к |
лА |
к |
дус |
к |
д |
T ; |
|
|
|
|
|
де a |
3 |
= T2 |
+ к |
сп |
к |
лА |
к |
дкш |
к |
д |
T ; |
||||
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|||||||||||
a2 = 2ξT2 + кспклАкдус (кпT1 + кд );
a1 = 1 + кспклАкдус (киT1 + кп ) ; a0 = кспклАкдуски ;
2)по возмущающему воздействию
Фf u (s) =
|
|
Wf |
|
(s) W |
|
(s) |
|
|
|
|||||
= − |
|
лА |
|
|
|
|
|
дус |
|
|
|
= |
||
1 + Wк (s) Wсп (s) WлА (s) Wдус (s) |
||||||||||||||
|
|
кf |
к |
дус |
s |
(T s + 1) |
|
|
|
|||||
|
= − |
лА |
|
|
|
|
1 |
|
|
. |
|
|||
|
a s3 + a |
2 |
s2 |
+ a s + a |
0 |
|
||||||||
|
|
|
|
|||||||||||
|
|
3 |
|
|
|
|
|
|
1 |
|
|
|||
a2 = 2ξT2 + кспклАкдкш (кпT1 + кд ); a1 = 1 + кспклАкдкш (кiT1 + кп ) ;
a0 = кспклАкдкшкi ;
2) за збурним діянням
U (s) |
= |
|
|
|
|
|
|
|
|
|
|
V (s) |
|
|
|
|
|
|
|
|
|
||
в |
|
WлfА (s)Wдкш (s) |
|
|
|
|
|||||
= − |
|
|
|
|
|
= |
|||||
1 + W |
(s)W |
(s)W |
(s) W |
(s) |
|||||||
|
|
к |
сп |
|
|
лА |
|
дкш |
|
|
|
|
|
= − |
кfлАкдкшs(T1s + 1) |
|
. |
(4.37) |
|||||
|
|
a s3 + a |
2 |
s2 + a s + a |
0 |
||||||
|
|
|
|
|
|
||||||
|
|
|
3 |
|
|
1 |
|
|
|
||
Далее, используя теорему о |
Далі, використовуючи теорему про |
конечном значении оригинала, получим |
кінцеве значення оригіналу, отримаємо |
выражение установившейся ошибки |
вираз сталої похибки САС: |
САС: |
|
1) от задающего воздействия |
1) за задавальним діянням |
150

Du уст = lim Du (t )= lim sФ u (s) Uз (s) = lim s |
|
s (T22s2 + 2xT2s + 1) |
|
× |
|
DUз |
= 0 ; |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
(ст) |
t →∞ |
s→0 |
|
s→0 a3s3 + a2s2 + a1s + a0 |
|
|
|
s |
|
||||||||||||
2) от возмущающего воздействия |
2) за збурним діянням |
|
|
|
|
|
|
|||||||||||||||
|
= lim Duf (t )= lim sФf |
(s)V (s) = - lim s |
|
кf |
к |
дкш |
s(T s + 1) |
|
|
|
DV |
|
||||||||||
Duf |
|
лА |
|
|
1 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
× |
в = 0 . |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
уст |
t →∞ |
u |
в |
s→0 |
|
a s3 + a |
|
s2 |
+ a s + a |
|
|
|
s |
|
||||||||
s→0 |
|
|
2 |
0 |
|
|
|
|||||||||||||||
( |
ст) |
|
|
|
|
|
3 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
Таким образом, наличие в |
Таким |
|
|
чином, |
наявність |
у |
||||||||||||||||
структуре |
КЭ |
интегральной |
структурі КЕ |
|
|
інтегральної |
складової |
|||||||||||||||
составляющей |
обеспечивает |
точность |
забезпечує |
точність при |
ступінчастих |
||||||
при |
ступенчатых |
|
входных |
вхідних діяннях. |
|
||||||
воздействиях. |
|
|
|
|
|
|
|
|
|
|
|
Для |
обеспечения |
динамических |
Для |
забезпечення |
динамічних |
||||||
показателей |
качества |
определим |
показників |
якості визначимо бажану |
|||||||
желаемую частоту среза, используя |
частоту зрізу, використовуючи номо- |
||||||||||
номограмму (рис. 4.6), согласно которой |
граму (рис. 4.6), згідно з якою зада- |
||||||||||
заданному |
перерегулированию |
соотве- |
ному перерегулюванню відповідає спів- |
||||||||
тствует соотношение |
|
|
відношення |
|
|
|
|
||||
|
|
tпп = |
3,1π |
. |
|
|
|
tпп = |
3,1π |
. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
wср |
|
|
|
|
wзрБ |
|
||
Следовательно, желаемая частота
среза при tппmax = 3 с
wсрж = 3,1π = 3,2 рад/с. 9
Выбор параметров корректирую-
щего элемента с ПИД структурой.
Для нахождения коэффициентов методом модального управления по выходу следует загрузить листинг программы в Matlab и установить начальные диапазоны изменения параметров КЭ: кп = [1;10] ; ки = [1;10] ;
кд = [0;1]. В результате выполнения
программы получим линии равных значений hз , ϕз , ωср (рис. 4.21–4.23).
Особенность полученной системы состоит в том, что запасы устойчивости по амлитуде и по фазе уменьшаются с увеличением коэффициента кд .
Поэтому для дальнейшего уточнения значений параметров КЭ выберем
Отже, бажана частота зрізу при
tппmax = 3 с
wзрБ = 3,1π = 3, 2 рад/с. 3
Вибір параметрів коригуювальнго елемента з ПІД структурою.
Для |
знаходження |
коефіцієнтів |
методом |
модального |
управління за |
виходом |
слід завантажити лістинг |
|
програми в Matlab і встановити
початкові |
диапазони зміни |
параметрів |
КЕ: кп = |
[1;10] ; кi = [1;10] ; |
кд = [0;1]. |
У результаті виконання програми отримаємо лінії рівних значень hз , ϕз ,
ωзр (рис. 4.21–4.23).
Особливість отриманої системи полягає у тому, що запаси стійкості за амлітудою і за фазою зменшуються зі збільшенням коефіцієнта кд .
Тому для подальшого уточнення значень параметрів КЕ виберемо
151

вариант на рис. 4.21, соответствующий |
варіант на рис. 4.21, що відповідає |
кд = 0,01. |
кд = 0,01. |
а |
б |
в |
Рис. 4.21. Линии равных значений |
|
Рис. 4.21. Лінії рівних значень |
hз , ϕз , ωср при кд = 0,01 |
|
hз , ϕз , ωзр при кд = 0,01 |
а |
б |
в |
Рис. 4.22. Линии равных значений |
|
Рис. 4.22. Лінії рівних значень |
hз , ϕз , ωср при кд = 0,1 |
|
hз , ϕз , ωзр при кд = 0,1 |
152

а |
б |
в |
Рис. 4.23. Линии равных значений |
|
Рис. 4.23. Лінії рівних значень |
hз , ϕз , ωср при кд = 1 |
|
hз , ϕз , ωзр при кд = 1 |
Расчет переходных характеристик скорректированной системы,
определение показателей качества.
Выберем на линиях уровня частоты среза (см. рис. 4.21, в) точку М с ко-
ординатами кп = 9 , ки = 3,3 , кд = 0,01,
примерно соответствующими желаемой частоте среза ωcpж = 3, 2 рад/с. Тогда
Розрахунок перехідних характеристик скоригованої системи, визна-
чення показників якості.
Виберемо на лініях рівня частоти зрізу (див. рис. 4.21, в) точку М з коор-
динатами кп = 9 , кi = 3,3 , кд = 0,01, що
приблизно |
відповідають |
бажаній |
частоті зрізу |
ωзpб = 3,2 |
рад/с. Тоді |
передаточная функция ПИД КЭ примет |
передавальна функція ПІД КЕ матиме |
вид |
вигляд |
W (s) = Uк (s) к DU (s)
Получим переходные характеристики скорректированной системы при ступенчатых задающем uз (t ) =1,8 ×1(t )
и возмущающем vв (t ) = -3 ×1(t ) воз-
= 0,01s2 + 9s + 3 . s
Отримаємо перехідні характеристики скоригованої системи при ступінчастих задавальному uз (t ) =1,8 ×1(t ) і
збурному vв (t ) = -3 ×1(t ) діяннях. Для
действиях. Для этого воспользуемся програм-мной средой Matlab/Simulink. Схема моделирования САС изображена на рис. 4.24.
цього скористуємося програ-мним середовищем Matlab/Simulink. Схема моделювання САС зображено на рис. 4.24.
153
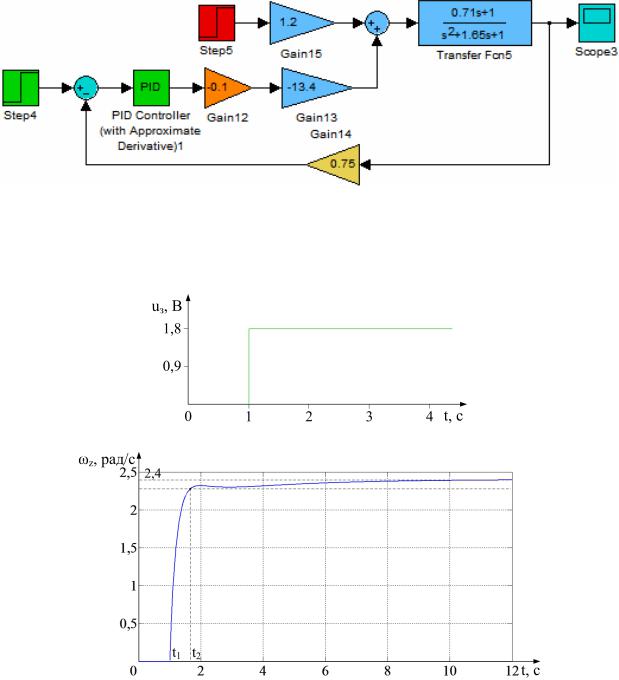
Рис. 4.24. Схема моделирования |
Рис. 4.24. Схема моделювання |
скорректированной САС |
скоригованої САС |
Графики переходных характери- |
Графіки перехідних характеристик |
стик показаны на рис. 4.25, 4.26. |
показано на рис. 4.25, 4.26. |
а
|
б |
Рис. 4.25. Переходная характеристика |
Рис. 4.25. Перехідна характеристика |
САС по задающему воздействию: |
САС за задавальним діянням: |
а – uз ( t ) ; б – ωz ( t ) |
а – uз ( t ) ; б – ωz ( t ) |
Определим показатели качества |
Визначимо показники якості системи |
системы по переходным характеристикам: |
за перехідними характеристиками: |
1)по задающему воздействию: 1) за задавальним діянням: стала
установившаяся ошибка |
u уст = 0 ; время |
похибка |
uст = 0 ; |
час перехідного |
переходного процесса |
tпп = 0,7 с; |
процесу |
tпп = 0,7 |
с; перерегулювання |
перерегулирование σ = 0 ; |
|
σ = 0 ; |
|
|
154

2) по возмущающему воздействию: |
2) за збурним діянням: стала похибка |
|
установившаяся ошибка |
u уст = 0 ; время |
uст = 0 ; час перехідного процесу |
переходного процесса |
tпп = 4,3 с; |
tпп = 4,3 с; перерегулювання σ = 17,8 %. |
перерегулирование σ = 17,8 %.
а
|
|
|
|
|
|
б |
|
|
|
|
|
Рис. 4.26. Переходная характеристика |
Рис. 4.26. Перехідна характеристика |
||||||||||
САС по возмущающему воздействию: |
|
САС за збурним діянням: |
|
||||||||
|
а – vв ( t ) ; б – ωz ( t ) |
|
|
а – vв ( t ) ; б – ωz ( t ) |
|
||||||
Полученные |
показатели |
качества |
Отримані |
показники |
якості |
||||||
удовлетворяют |
требованиям, |
кроме |
задовільняють вимогам, окрім часу |
||||||||
времени переходного процесса САС по |
перехідного процесу САС за збурним |
||||||||||
возмущающему воздействию. |
|
діянням. |
|
|
|
|
|||||
Для |
увеличения |
быстродействия |
Для збільшення швидкодії системи |
||||||||
системы увеличим частоту среза пере- |
необхідно |
збільшити |
частоту |
зрізу |
|||||||
мещением точки М вправо (рис. 4.21, |
переміщенням точки М вправо (рис. |
||||||||||
в), при этом новое положение точки М |
4.21, в), при цьому нове положення |
||||||||||
будет |
соответствовать |
боль-шему |
точки |
М |
відповідатиме більшому |
||||||
значению ϕз и меньшему значению hз . |
значенню ϕз і меншому значенню hз . |
||||||||||
Выберем на рис. 4.20 точку М1 с |
Виберемо на рис. 4.20 точку М1 з |
||||||||||
координатами кп = 8 , |
ки = 4,7 |
и полу- |
координатами кп = 8 , |
кi = 4,7 і отри- |
|||||||
чим переходные |
характеристики при |
маємо |
перехідні |
характеристики при |
|||||||
тех же входных воздействиях (рис. 4.27, |
таких самих вхідних діяннях (рис. 4.27, |
||||||||||
4.28). |
|
|
|
|
|
4.28). |
|
|
|
|
|
155

а
|
б |
Рис. 4.27. Переходная характеристика |
Рис. 4.27. Перехідна характеристика |
САС по задающему воздействию: |
САС за задавальним діянням: |
а – uз ( t ) ; б – ωz ( t ) |
а – uз ( t ) ; б – ωz ( t ) |
а
|
б |
Рис. 4.28. Переходная характеристика |
Рис. 4.28. Перехідна характеристика |
САС по возмущающему воздействию: |
САС за збурним діянням: |
а – vв ( t ) ; б – ωz ( t ) |
а – vв ( t ) ; б – ωz ( t ) |
156
Определим показатели качества |
Визначимо показники якості системи |
системы по переходным характеристикам: |
за перехідними характеристиками: |
1)по задающему воздействию: 1) за задавальним діянням: стала
установившаяся ошибка |
u уст = 0 ; время |
похибка |
uст = 0 ; |
час перехідного |
|
переходного процесса |
tпп = 0,6 с; |
процесу |
tпп = 0,6 |
с; |
перерегулювання |
перерегулирование σ = 0 ; |
|
σ = 0 ; |
|
|
|
2) по возмущающему воздействию: |
2) за збурним діянням: стала похибка |
||||
установившаяся ошибка |
u уст = 0 ; время |
uст = 0 ; |
час |
перехідного процесу |
|
переходного процесса tпп = 2,9 с; перере- |
tпп = 2,9 с; перерегулювання σ = 18,7 %. |
||||
гулирование σ = 18,7 %. |
|
|
|
|
|
Новые значения параметров КЭ дали возможность устранить колебательность и улучшили основные показатели качества системы автоматической стабилизации.
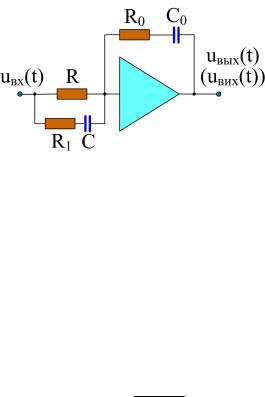
Разработка схемы набора
передаточной функции КЭ на лабораторном стенде. Представим схему набора передаточной функции КЭ в виде интегрирующего элемента (рис. 4.29) с двумя форсирующими и одним инерционным звеньями аналогично рис. 4.14.
Нові значення параметрів КЕ надали можливість позбутися коливальності й поліпшили основні показники якості системи автоматичної стабілізації.
Розроблення схеми набору пере-
давальної функції КЕ на лабора-
торному стенді. Подамо схему набору передавальної функції КЕ у вигляді інтегруючого елемента (4.29) з двома форсуючими та одною інерційною ланками аналогічно рис. 4.14.
Рис. 4.29. Схема набора передаточной |
Рис. 4.29. Схема набору передавальної |
функции ПИД КЭ |
функції ПІД КЕ |
Передаточная функция КЭ и взаимосвязь между её и значениями сопротивлений резисторов и емкостей конденсаторов, установленных в цепях операционного усилителя согласно рис. 4.29, будет иметь вид:
Wк (s) =
Передавальна функція КЕ і взаємозв’язок між її параметрами і значеннями опорів резисторів і ємностей конденсаторів, установлених в ланцюгах операційного підсилювача згідно з рис. 4.29, матиме вигляд:
Uк (s) = U (s)
157

= |
кк ( Tк1s + 1)( Tк2s + 1) |
|
|
|
|
|
= |
кк ( Tк1s + 1)( Tк2s + 1) |
|
||||||||
|
|
|
, |
|
|
|
|
|
|
|
|
|
, (4.38) |
||||
s ( T s + 1) |
|
|
|
|
|
|
|
|
|
s ( Ts + 1) |
|||||||
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
где |
|
|
|
|
|
|
|
|
|
де |
|
|
|
|
|
|
|
|
к |
к |
= |
1 |
; T |
= R |
0 |
C |
0 |
; T |
= (R + R |
1 |
)C ; |
|
|||
|
|
|
|||||||||||||||
|
|
|
RC0 |
|
к1 |
|
|
к2 |
|
|
|
|
|
||||
Tи = R1C . |
|
|
|
|
|
|
|
|
Ti = R1C . |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Преобразуем структуру числителя |
|
|
Перетворимо структуру |
чисель- |
|||||||||||||
идеального ПИД КЭ (4.29) к структуре |
|
ника ідеального ПІД КЕ (4.29) у стру- |
|||||||||||||||
числителя (4.38). Для этого найдем ктуру чисельника (4.38). Для цього
корни квадратного полинома (4.29) с |
|
знайдемо корені квадратного полінома |
||||||||||||||||||||||
учетом полученных в синтезе САС |
|
(4.29) з урахуванням отриманих у син- |
||||||||||||||||||||||
числовых значений параметров: |
|
|
|
|
|
|
|
тезі САС числових значень параметрів: |
||||||||||||||||
кдs2 + кпs + ки = 0,01s2 + 8s + 4,7 = 0 ; |
|
|
кдs2 + кпs + кi = 0,01s2 + 8s + 4,7 = 0 ; |
|||||||||||||||||||||
кк = ки = 4,7 ; |
|
|
|
|
|
|
|
|
|
|
|
|
кк = кi |
= 4,7 ; |
|
|||||||||
|
|
|
|
|
|
s |
= −0,6 ; T |
|
= |
1 |
|
=1,67 с; |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
|
|
|
к1 |
|
s1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
2 |
|
|
= −799, 4 ; T |
|
|
1 |
|
= 0,0012 с. |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
к2 |
|
s2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Постоянную |
времени |
инерцион- |
|
|
|
|
Сталу |
часу |
інерційної ланки |
|||||||||||||||
ного звена примем равной Tи = 0,01 c , |
|
приймемо |
такою, |
|
що |
дорівнює |
||||||||||||||||||
тогда передаточную |
функцию |
(4.38) |
|
Ti = 0,01 c , тоді передавальну функцію |
||||||||||||||||||||
можно представить в виде |
|
|
|
|
|
|
|
|
|
|
|
(4.38) можна подати у вигляді |
||||||||||||
|
W |
(s) = |
Uк (s) |
= |
4,7(1,67s + 1)(0,0012s + 1) |
. |
|
|
(4.39) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
к |
|
|
|
|
DU (s) |
|
|
s (0,01s + 1) |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Реализация |
параметров |
переда- |
|
|
|
|
Реалізація параметрів |
передаваль- |
||||||||||||||||
точной функции (4.39) на одном опера- |
|
ної функції (4.39) на одному опера- |
||||||||||||||||||||||
ционном усилителе затруднительна из- |
|
ційному підсилювачі ускладнена через |
||||||||||||||||||||||
за ограниченности стандартного ряда |
|
обмеженість стандартного ряду номіна- |
||||||||||||||||||||||
номиналов сопротивлений и емкостей. |
|
лів опорів та ємностей. |
|
|
||||||||||||||||||||
Поэтому представим передаточную |
|
|
|
|
Тому |
подамо |
передавальну |
|||||||||||||||||
функцию (4.39) в виде произведения |
|
функцію (4.39) у вигляді добутку двох |
||||||||||||||||||||||
двух множителей: |
|
|
|
|
|
|
|
|
Uк (s) |
|
|
|
множників: |
|
|
|
|
|
|
|||||
|
|
W (s) = |
|
= W (s) W (s) = |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
к |
|
|
DU (s) |
|
|
к1 |
|
к2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
= |
|
кк1 (1,67s + 1) |
× |
кк2 (0,0012s + 1) |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
(4.40) |
|||
|
|
|
|
|
0,01s + 1 |
|
|
|
s |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Принципиальная схема, соответствующая уравнению (4.40), будет иметь вид двух последовательно соеди-
Принципова схема, що відповідає рівнянню (4.40), буде мати вигляд двох послідовно з'єднаних операційних
158