

44. Разновидность с чпу по способу задания управляющей программы.
По способу задания УП:
- системы с NC – эти устройства с жесткой структурой алгоритма работы схемным путём. Но не может быть изменена после изменения системы. Все алгоритмы задаются с помощью блоков реализуемых ту или иную функцию. Модернизация может осуществляться только с помощью замены блока.
- системы с CNC – данные системы отличаются от предыдущих тем, что в их структуре имеются управление ЭВМ: вычислительное устройство, бло ввода и вывода информации, интерфейсное устройство. Данные системы обладают повышенной надежностью, система имеет малые габариты и массу. Также система снабжена диагностическими программами, с помощью которых легко обнаружить неисправность, упрощается программирование, повышается гибкость.
- системы с DNC – системы создаётся на базе мини ЭВМ и имеют устройства
- системы с HNC – ручное управление – ввод программы в ручную. Применяется для крупно габаритных станков. Применяют: станки токарной группы 16К20Ф3, 16Б16Ф3; фрезерной группы: 6Р13Ф3, 6Р12РФ3, станки сверлильной группы 2Р11РФ2,2Р135Ф2, горизонтально расточные станки 2А620Ф2, 2А622Ф2
47. Системы автоматического регулирования, следящие и адаптивные системы.
Эти системы предназначены для обеспечения поддержания регулируемой величины в заданных пределах.
ЭС- элемент сравнения У- усилитель
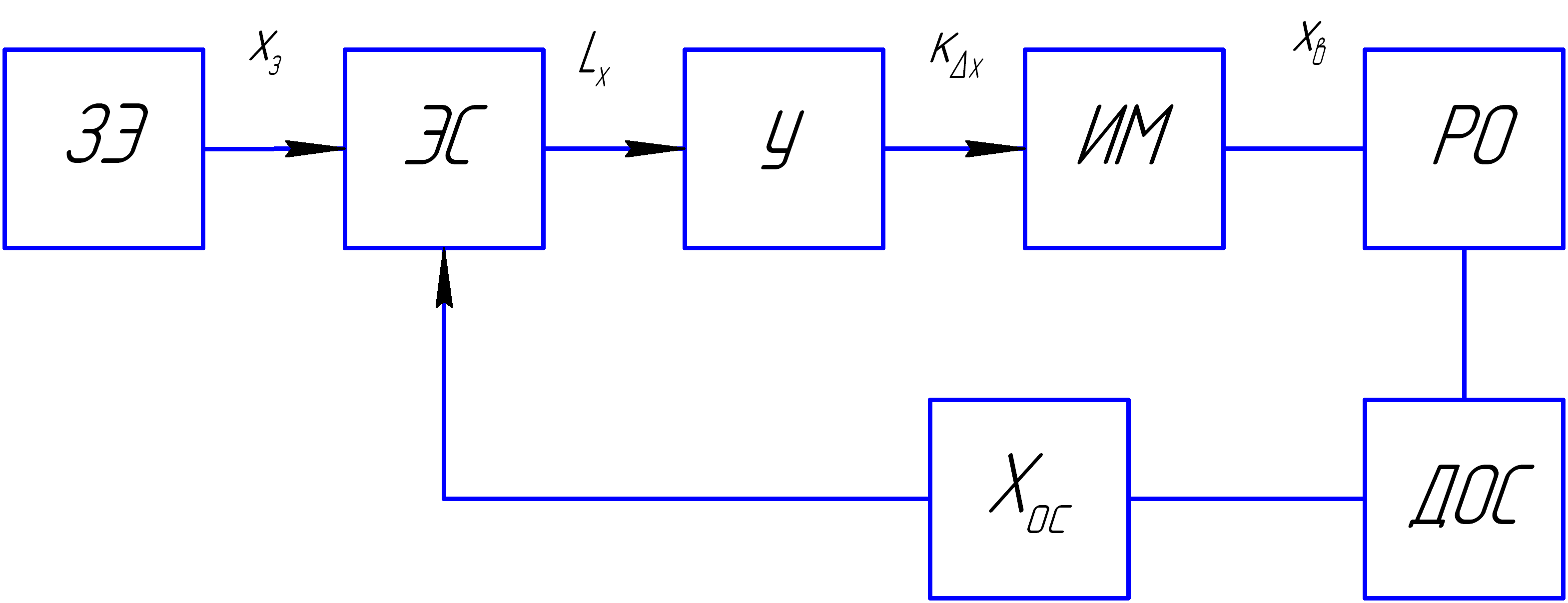
С задающего элемента сигнал подаётся в косвенном виде на элемент сравнения. Из элемента сравнения выходит сигнал рассогласования. В усилителе он усиливается.
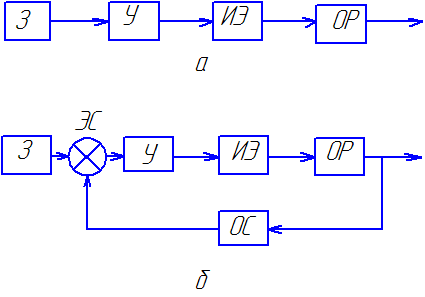
Рис. 26. Функциональные схемы разомкнутой (а) и замкнутой (б) систем автоматического регулирования:
З- задатчик; У- усилитель; ИЭ- измерительный элемент; ОР- объект регулирования; ОС- обратная связь; ЭС- элемент сравнения
Адаптивной системой управления или самоприспосабливающейся системой называют такую систему, в которой автоматически изменяется способ функционирования управляющей части в зависимости от конкретных условий работы.
В настоящее время развиваются три вида адаптивного управления:
-
Адаптивная система функционально регулирования, управляющее воздействие в этой системе является функцией какого-либо параметра (подача – функция одной из составляющей силы резания S=f(PZ), скорость резания – функция мощности V=f(N);
-
Адаптивная система предельного (экстремального регулирования, обеспечивает постоянство параметров при предельно возможном их значении;
Адаптивная система оптимального регулирования – представляет собой использование совокупности многих факторов при комплексном критерии оптимальности. В соответствии с этим критерием осуществляется изменение регулируемых параметров, например, поддержание в станке режима обработки, обеспечивающего максимальную производительность и наименьшую себестоимость обработки, определяющихся заданием оптимальных значений скорости, силы резания и температуры
Следящая система управления — вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия, слежения за ним. Они представляют собой особый класс систем автоматического управления, в которых изменения происходят по любому закону. Входной сигнал непрерывно обрабатывается системой, при этом заданное входное воздействие, обрабатываемое системой, изменяется произвольно в широких пределах.