

Элементы автоматического цикла управления.
![]()
К элементам автоматического цикла управления относятся:
- распределительные звенья (датчики)
- передаточные звенья
- исполнительные звенья
С помощью распределительного звена создаётся сигнал на выполнение команды.
Передаточное звено передаёт, усиливает, ослабляет, заменяет сигнал, полученный с распределительного звена. Этот сигнал может быть преобразован в передаточном звене, где могут осуществляться вычислительные или логические операции. Сигнал передаётся на рабочий орган или выполняет часть ТП.
32. Первичные измерительные преобразователи (датчики). Виды датчиков.
Все средства контроля имеют первичные преобразователи, т.е. датчики. Датчик-устройства которые преобразовывают изменения контрольных параметров в выходной сигнал, являющийся информацией
-пневматические датчики
-электроконтактные датчики
-индуктивные датчики
-емкостные датчики
-виброиндукт-ые датчики
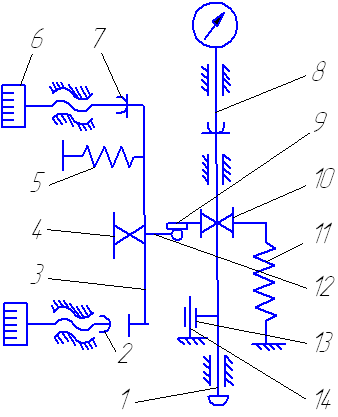 Рис.
16.1.2. Принципиальная схема электроконтактного
датчика: 1 – стержень; 2, 7 – контакты; 3
– коромысло; 4 – пружинный крест; 5, 11 –
пружины 6 – оцифрованный барабан; 8 –
измерительная головка; 9 – пятка; 10, 13 –
хомутики; 12, 14 – штифты.
Рис.
16.1.2. Принципиальная схема электроконтактного
датчика: 1 – стержень; 2, 7 – контакты; 3
– коромысло; 4 – пружинный крест; 5, 11 –
пружины 6 – оцифрованный барабан; 8 –
измерительная головка; 9 – пятка; 10, 13 –
хомутики; 12, 14 – штифты.
На рис. 16.2.1 показана принципиальная схема электроконтактного датчика. Изменение размера контролируемой детали вызывает перемещение стержня 1 с навернутым на него съемным наконечником. При этом на пружинном кресте 4 поворачивается коромысло 3 с запрессованными в него подвижными вольфрамовыми контактами 7. Движение передается через твердосплавную пятку 9 хомутика 10, воздействующего на корундовый штифт 12, запрессованный в малое плечо коромысла. Измерительное усилие создается пружиной 11. На стержне 1 также закреплен хомутик 13 с регулируемым по ширине пазом, в который входит неподвижный штифт 14, что предохраняет шток от поворота в направляющих скольжения.
При замыкании контактов 7 и 2, вмонтированных а оцифрованные барабаны 6, которые настраивают по образцовым деталям, выдается сигнал. Если под наконечник установлена деталь, значение которой превышает верхнее контролируемое значение, пятка отходит от штифта, и под действием пружины 5 замыкается верхний контакт. В корпусе преобразователя имеется гнездо, куда может быть установлена измерительная головка 8 для настройки преобразователя. Датчик работает в любом положении.
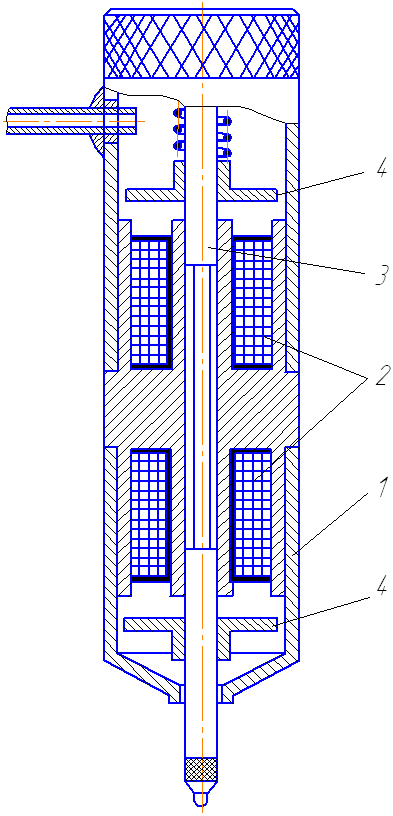 Рис16.1.4.
Индуктивный датчик:
Рис16.1.4.
Индуктивный датчик:
1 – корпус; 2 – индуктивные катушки; 3 – шток; 4 – якорь.
Индуктивные датчики позволяют измерять непрерывно меняющиеся размеры. Это необходимо при контроле деталей в процессе обработки, измерении шероховатости поверхности, контроле зубчатых колес и в других случаях. Принцип действия датчика состоит в том, что при изменении контролируемого размера непрерывно меняется его индуктивность. В этом случае измерительный стержень смещается относительно катушек датчика, а следовательно, смещается и якорь. В результате изменения взаимного расположения якоря и катушки меняется сопротивление магнитной цепи датчика, а следовательно, и его индуктивность.
Наиболее часто применяют дифференциальные датчики, имеющие две катушки, между которыми помещен якорь. При смещении якоря из нейтрального положения индуктивность одной катушки возрастает, а другой – на те же величину убывает. Это позволяет увеличить чувствительность датчика вдвое по сравнению с датчиками, имеющими одну катушку. Помимо этого, в дифференциальных датчиках значительно уменьшается влияние нестабильности питающего напряжения на точность его работы. Для включения датчиков наиболее часто используют неуравновешенную мостовую схему и схему самобалансирующегося моста.
В основном индуктивные датчики являются безрычажными, т. е. не содержат увеличивающих механизмов. Это объясняется тем, что чувствительность индуктивных датчиков в большей степени зависит то выбранной электрической схемы, частоты питающего тока и в меньшей – от увеличивающего механизма. Основными узлами безрычажного индуктивного датчика являются корпус 1 (рис. 16.1.4), индуктивные катушки 2, измерительный шток 3 с укрепленным на нем одним или двумя якорями 4.