

Общие проблемы Биокибернетики
Уже самое общее определение жизни Ф. Энгельсом, как непрерывного самовосстановления сложных органических веществ, содержит указание на две главные ее специфические особенности: целесообразность саморегулирования и сложность системы.
Разнообразные биологические науки описывают частные проявления целесообразного саморегулирования на разных уровнях организации сложных живых систем — от метаболического баланса отдельных клеток до динамики популяций растений и животных. С другой стороны, кибернетика изучает в наиболее общем виде закономерности целенаправленного управления, чтобы использовать их для создания искусственных сложных систем автоматической техники. Отсюда возникает ряд проблем, общих для биологии и кибернетики, которые образуют фундамент биокибернетики и являются источником формирования ее основных понятий и принципов. Ключ ко многим из них лежит в точном определении особенностей живых систем, их структурно-функциональной организации специфических свойств и ведущих механизмов.
Живые организмы как кибернетические системы
Представляя собой многоуровневые сложно организованные системы, живые существа наряду с общесистемными свойствами отличаются специфическими особенностями, которые выявляются уже в их взаимоотношениях с другими системами.
Системный подход к явлениям жизни
Живые системы относятся к вероятностным разной степени сложности. Однако оценка движений руки, поднимающей груз, как простой вероятностной системы, а деятельности мозга как очень сложной отражает лишь разные уровни изучения жизни организма. В первом случае сокращения мышц действительно образуют простую систему внешних механических реакций. Но каждая такая простая двигательная реакция явилась конечным результатом координации в пространстве и времени множества потоков нервных импульсов, организованных деятельностью многих тысяч нервных клеток, на основе информации о многообразии раздражителей внешней среды, внутреннем состоянии обмена веществ и взаимодействия миллионов клеток организма. Если рассматривать лишь внешнюю сторону двигательного акта, считая его системой, а составляющие его движения элементами, то такая простая система легко описывается в понятиях механики. Это механическая система, реализуемая живым телом. Если же мы ставим задачу изучения приспособительного поведения, то система целостного организма должна рассматриваться как образуемая колоссальным множеством элементарных органных, клеточных и субклеточных процессов, качественно описываемых в понятиях биологии. Тогда становится ясным, что живые системы по своей сущности относятся к классу очень сложных вероятностных систем.
При этом следует иметь в виду, что живые организмы можно рассматривать на разном уровне и в разных плоскостях системного анализа. Так, структура, элементарная для формирования системы более высокого уровня, одновременно сама является системой, образованной из элементов предшествующего уровня (см. схему). Вместе с тем один и тот же объект может рассматриваться с точки зрения разных сторон его организации и свойств деятельности.
Схематическое изображение иерархии ровней организации живого, каждый из которых является и элементом, и системой
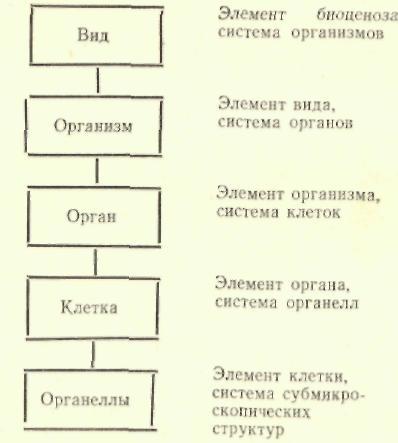
Например, можно изучать нервную клетку как термодинамическую систему обмена веществ и энергии или как возбудимую систему физико-химических механизмов генерации импульсов, или как элемент в системе рефлекторного центра, а последний в свою очередь может рассматриваться не только как система, но и как элемент в системе целостных актов поведения. Продолжая такое иерархическое «укрупнение» систем в организме, мы выходим за рамки физиологии и оказываемся в сфере биологических, а для человека в сфере общественных явлений.
Система человек — машина
Особую категорию систем образуют машины, управляемые человеком. Изучение их свойств становится все более практически важной задачей в связи со сложностью управления современной техникой и требованиями ее согласования с естественными данными организма человека. Такая комплексная система включает в себя как живые, так и неживые звенья в качестве взаимодействующих подсистем. Здесь происходит функциональное соединение очень сложных вероятностных биокибернетических систем со всеми другими, в том числе простыми детерминированными машинами.
В отношении таких комплексных систем возникает прежде всего вопрос об оптимальном распределении функций между человеком и техническими управляющими устройствами. При этом учитываются их возможности и ограничения, как, например, свойственные автомату быстродействие, но узкий формализм и свойственные человеку способность к решениям в условиях неопределенности, но их медленность. Более детальный анализ условий оптимальности взаимодействия человека и машины составляет одну из задач инженерной психологии, с которой можно ознакомиться по специальным руководствам.
Приспособлением условий труда к человеку занимается эргономика, которая широко использует данные физиологии и психологии труда.
В различных производственных, транспортных, экономических и других системах человек входит как оператор, осуществляющий Функции регулирования. Типичный случай его взаимосвязи с машиной, образующей единую систему, показан на схеме, приведенной ниже, где v(t) —скорость в данный момент, х(t) —степень нажатия педали акселератора в данный момент, Fе(х) —сила тяги двигателя при данном нажатии педали акселератора, Fg— силы сопротивления, зависящие от наклона дороги, Fr(v)—силы сопротивления встречного потока воздуха и трения, зависящие от скорости.
Своеобразное взаимодействие человека и машины происходит в процессах автоматизированного обучения. До недавнего времени обучение как процесс усвоения знаний и овладения навыками осуществлялся только человеком — учителем. Однако анализ объективных закономерностей этого процесса позволил внести в пего элементы автоматизации и оптимизации. Более подробно с теорией и практикой программированного обучения и использования так называемых обучающих машин можно ознакомиться по специальным руководствам.
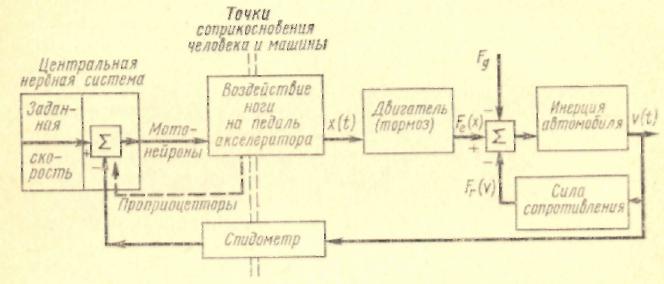
Блок-схема системы водитель — автомобиль(по Дж. Милсуму, 1968)
В зависимости от результатов экзамена на каждом этапе обучения обучающийся или переходит к следующему этапу в случае правильных ответов, или возвращается по «отрицательной обратной связи» назад. Такое возвращение может происходить не только к началу данного этапа, но еще дальше назад в зависимости от выявленных дефектов усвоения.
Существуют и другие виды комплексных систем, включающих в себя живые и неживые звенья. Сюда относятся, например, биоэлектрическое управление.
Основные направления работы в этой области освещены в одноименном сборнике (В. С. Гурфинкель, В. Б. Малик и др., 1972). Сюда относится управление разнообразными системами — от двигательных протезов до пилотирования самолетов. К этим проблемам примыкает использование высокочувствительных биологических рецепторов в качестве датчиков в системах регулирования. Во всех таких комплексных системах именно биокибернетические звенья являются носителями свойств, наиболее важных для реализации функций системы.
Все возрастающая сложность управления современными техническими средствами чрезвычайно повышает требования к человеку-оператору и его ответственность за принимаемые решения. Поэтому большое внимание уделяется развитию биотехнических систем, в которых поведение человека-оператора контролируется, а его действия облегчаются техническими устройствами. Такие биотехнические системы служат не только для оперативного управления различными сложными объектами, но и для профессионального отбора и тренировочной подготовки операторов. Для формализации сложных процессов совместной деятельности людей и машин пользуются понятиями эргатических систем, как комплексов взаимодействующих компонентов, среди которых есть и человек.
Структурные и функциональные особенности организации биологических систем
Определение живых систем как сложных и очень сложных вероятностных кибернетических дает основание для детального анализа их структурной и функциональной организации специальными методами кибернетики.
Самоорганизация и ее структурные основания
Прежде всего следует рассмотреть фундаментальное свойство живого — способность к самоорганизации. Противоречия в определении самоорганизации получили образное выражение в следующем высказывании крупного кибернетика У. Эшби (1966) на специальном симпозиуме по самоорганизующимся системам: «Так как ни об одной системе нельзя утверждать, что она является самоорганизующей и так как выражение «самоорганизующаяся» ведет к укоренению весьма путаного противоречивого представления о данной проблеме, это выражение, вероятно, вообще не следовало бы употреблять». Однако на том же симпозиуме Эшби заявил, что «в настоящее время принципы, лежащие в основе самоорганизующихся систем, известны достаточно полно в том смысле, что над большей частью вопросов приподнята завеса таинственности». Понятие самоорганизации охватывает в наиболее общем виде все специфические свойства жизни — сохранение индивидуальности при непрерывном обмене веществ и энергии с окружающей средой, активация с восстановлением исходного состояния при раздражении, воспроизведение себе подобных при размножении и т. д.
Самоорганизация характерна именно для сложных и очень сложных вероятностных систем. Структурным основанием самоорганизации является множественность элементов и разветвленность связей между ними, ведущих к возникновению целостности, а функциональным основанием — развитие гибкого взаимодействия между элементами по типу обратных связей, направленных на оптимизацию системы. Зачатки самоорганизации можно встретить и в сложных вероятностных системах неживой природы. Например, множество молекул соли, случайно взаимодействующих в растворе, при достижении определенных условий самоорганизуются в кристаллическое тело. Однако вряд ли нужно перечислять различия между ростом кристалла и ростом живого организма. На уровне живого самоорганизация приобретает важную качественную особенность - она становится способом существования этого класса систем. По этому некоторые, наиболее общие характерные черты биологической самоорганизации проявляются уже в процессе возникновения жизни и связаны с проблемой ее происхождения.
В настоящее время наиболее обоснованной гипотезой о происхождении жизни является представление А. И. Опарина о первичной агрегации органических полимеров в коацерватные капли, которые способны к избирательному поглощению определенных соединений из внешней среды, т. е. к зачаточному обмену веществ. Такие коацерватные капли образуются, когда органические молекулы достигают в процессе полимеризации определенных размеров. Тогда они входят между собой в особые физико-химические отношения, которые дают им возможность выделиться из общего водного раствора.
Обособление системы от окружающей среды составляет существенный признак самоорганизации. В современной цитологии все более распространяется мнение, что комплексные коацерваты составляют основу протоплазмы живых клеток. Это находит подтверждение и в том, что, применяя физические и химические воздействия, вызывающие вакуолизацию живых клеток, можно было вызвать явления «вакуолизации» в комплексных коацерватах.