

Механика. Лабораторный практикум. Работы 17-26
.pdfОписание установки и метода измерений
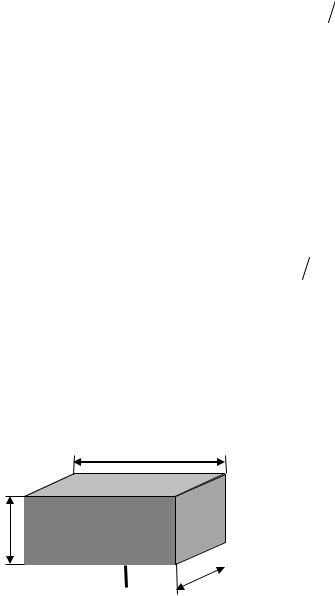
Установка включает в свой состав (см. рис. 2, 3, 4): основание 1, вертикальную стойку 2, верхний, нижний и средний кронштейны 3. Основание снабжено тремя регулируемыми опорами 4 и зажимом для фиксации стойки 5. Вертикальная стойка выполнена из металлической трубы. Верхний и нижний кронштейны предназначены для крепления узлов подвески и натяжения торсиона (стальной проволоки) 6, с которым связана металлическая рама 7 с грузами 8.
Конструкция рамки позволяет закреплять тела 9, значительно отличающиеся друг от друга по своим размерам. Тела крепятся при помощи подвижной балки 10, перемещающейся по направляющим между балками. Балка устанавливается путем затягивания гаек 11, расположенных на её концах.
На среднем кронштейне, на котором нанесена шкала отсчёта угла закручивания торсиона 12, расположены: электромагнит 13, предназначенный для удерживания рамки в исходном положении и её освобождения (при этом возникают крутильные колебания рамки вокруг вертикальной оси), фотодатчик 14, предназначенный для определения периода колебаний.

 3 6
3 6 
13 |
8 |
|
11 |
|
7
14 12 9
10
 3
3
1 |
2 |
5 |
4 |
Рис. 2. |
Рис. 3. |
|
Рис. 4. |
Так как коэффициент жесткости k неизвестен (см. формулу (3)) и неизвестен момент инерции рамки I0, найдем период колебаний пустой рамки Т0, период колебаний рамки с двумя цилиндрами с известным моментом инерции Т1 и период колебаний рамки с телом Т2, момент инерции которого необходимо определить. Перепишем формулу (3) с учетом сказанного:
11
4π2I |
0 |
=kT 2 |
, |
(3а) |
|
0 |
|
|
|
4π2I = kT 2 |
, |
(3б) |
||
1 |
1 |
|
|
|
4π2I |
2 |
= kT 2 |
, |
(3в) |
|
2 |
|
|
|
где I1 – момент инерции рамки с двумя цилиндрами (см. рис. 3), I2 – момент инерции рамки с телом (см. рис. 4). Момент инерции цилиндрического груза относительно оси симметрии равен Mr2/2, где M – масса груза, r – радиус груза. Поскольку цилиндрических грузов два и их оси симметрии находятся на расстоянии l от оси крутильного маятника, которая совпадает с торсионом (см. рис. 3), то момент инерции I1, согласно теореме Штейнера будет равен
I = I |
0 |
+2(Mr2 |
2 +Ml2 ). |
(4) |
1 |
|
|
|
Момент инерции рамки с телом равен
I2 = I0 + Iт , |
(5) |
где Iт – момент инерции тела. Формула (5) справедлива, если ось симметрии тела совпадает с осью крутильного маятника и проходит через центр масс тела. Перепишем (3а) – (3в) с учетом (4) и (5)
|
|
4π2I |
0 |
=kT 2 , |
|
|
(6а) |
|||
4π2 (I |
|
|
|
|
|
0 |
|
|
|
|
0 |
+2(Mr2 |
2 +Ml2 ))= kT 2 |
, |
(6б) |
||||||
|
4π2 (I |
|
|
|
|
)= kT |
1 |
|
|
|
|
|
0 |
+ I |
т |
2 . |
|
(6в) |
|||
|
|
|
|
|
2 |
|
|
|||
Из получившейся системы уравнений (6а) – (6в), путем математических преобразований, получим расчетную формулу для момента инерции тела:
|
|
|
|
|
T 2 |
−T 2 |
|
Mr 2 |
|
2 |
|
|
||
|
|
|
|
|
|
2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Iт = T 2 |
−T 2 |
2 |
2 |
+ 2Ml |
|
. |
(7) |
||
|
|
|
|
|
||||||||||
|
|
a |
1 |
0 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
Теоретическое значение Iт момента |
|||||||||
|
|
|
|
|||||||||||
c |
|
|
|
|
инерции тела |
в форме |
прямоугольного |
|||||||
|
|
|
|
бруска размерами a, b, |
c (см. рис. 4, 5), |
|||||||||
|
|
|
b |
|
относительно |
оси, |
проходящей |
через |
||||||
|
|
|
|
|||||||||||
|
|
|
|
центр масс и параллельной вертикально- |
||||||||||
|
|
|
||||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
му ребру, определяется формулой: |
|
||||||||
|
Рис. 5 |
|
|
|
|
|
|
|
|
|
|
|
||
12

Iт = 121 m(a2 +b2 ),
где m – масса бруска. Массу бруска определим через плотность вещества ρ, из которого изготовлен брусок:
Iт = |
|
1 |
ρabc(a2 +b2 ). |
(8) |
|
12 |
|||||
|
|
|
|||
Порядок выполнения работы
1.Произведите регулировку положения основания установки при помощи регулировочных опор.
Подключите фотодатчик и электромагнит среднего кронштейна установки к блоку электронному при помощи кабеля. Вилку с маркировкой «Ф» вставьте в розетку фотодатчика, а вилку с маркировкой «Э» в розетку электромагнита.
2.Если на рамке расположены цилиндры (8) или брусок (9) (см. рис. 3, 4),
то снимите их и определите период колебаний T0 пустой рамки, согласно п.п. 3 – 6.
3.Отклоните рамку на угол 30º и зафиксируйте с помощью электромагнита, нажав кнопку «СЕТЬ» блока.
4.Нажмите кнопку «ПУСК» блока.
5.По показанию таймера блока определите значение десяти колебаний рамки, нажав кнопку «СТОП».
6.Определите среднее значение периода колебаний рамки по формуле:
T0 = nt ,
где t – время колебаний, n – число колебаний. Результат занесите в таблицу 1. 7. Установите два цилиндрических груза на планку рамки, согласно рис.
3.
8.Определите период колебаний T1 рамки с грузами, выполнив действия по п.п. 3 – 6.
9.Снимите цилиндрические грузы и установите в рамку прямоугольный брусок, согласно рис. 4.
10.Определите период колебаний T2 рамки с бруском, выполнив действия по п. 3 – 6.
11.Занесите в таблицу 1 значения массы M цилиндрического груза, его радиуса r = 15 мм, расстояние от оси вращения рамки до оси грузов l = 52,5 мм.
13
12. Снимите с крутильного маятника прямоугольный брусок и измерьте его размеры a, b, c, результаты занесите в таблицу.
|
|
|
|
|
|
|
|
|
Таблица |
|
|
|
|
|
|
|
|
|
|
T0 |
T1 |
T2 |
M |
r |
l |
a |
b |
c |
ρ |
|
|
|
|
|
|
|
|
|
|
13.Определите экспериментальное значение момента инерции бруска по формуле (7).
14.Определите теоретическое значение момента инерции бруска по фор-
муле (8).
15.Зная теоретическое и экспериментальное значения моментов инерции бруска, определите относительную разность этих значений по формуле:
η= |
|
|
Iэ − Iт |
|
|
100% . |
|
|
|
||||
|
|
|||||
|
|
|
|
|
||
|
|
|
Iт |
|||
Все расчёты производите в системе СИ.
Контрольные вопросы
1.Дайте определения векторов угловой скорости и углового ускорения. Как направлены эти векторы?
2.Что называется моментом силы относительно точки? Как определить его направление?
3.Что называется моментом инерции тела относительно оси? От чего зависит момент инерции тела? Объясните физический смысл момента инерции во вращательном движении.
4.Сформулируйте теорему Штейнера и поясните ее применение в настоящей работе.
5.Выведите формулу кинетической энергии при вращательном движе-
нии.
6.Сформулируйте закон динамики вращательного движения. Дайте определения входящих в него величин.
7.Сформулируйте закон сохранения момента импульса.
8.Какие колебания называются гармоническими? Запишите их уравне-
ние.
9.Что такое период колебаний и как его определить?
10.Выведите расчётную формулу (7).
14
Библиографический список
1.Савельев, И.В. Курс общей физики: В 3 т. Т. I / И.В. Савельев. – М.:
Наука, 1977. – Гл. 2. – § 14; Гл. 5. – § 38, 39; Гл. 7. – § 54.
2.Трофимова, Т.И. Курс физики / Т.И. Трофимова. – М.: Высш. шк., 1998.
–Гл. 18. – § 140 – 142.
3.Детлаф, А.А. Курс физики / А.А. Детлаф, Б.М. Яворский. – М.: Высш.
шк., 1999. – Гл. 4. – § 4.1 – 28.3.
15
ЛАБОРАТОРНАЯ РАБОТА № 21
СКАТЫВАНИЕ ТВЕРДОГО ТЕЛА С НАКЛОННОЙ ПЛОСКОСТИ
Цель работы: проверка закона сохранения механической энергии при скатывании твердого тела с наклонной плоскости.
Оборудование: наклонная плоскость, электронный секундомер, цилиндры разной массы.
Теоретические сведения
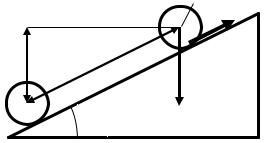
Пусть цилиндр радиуса R и массой m скатывается с наклонной плоскости, образующей угол α с горизонтом (рис. 1). На цилиндр действуют три силы: сила тяжести mg, сила нормального давления плоскости на цилиндр N и сила трения цилиндра о плоскость Fтр., лежащая в этой плоскости.
|
|
|
|
Цилиндр участвует одновременно |
|||
|
|
r |
O Fr |
в двух видах движения: поступательном |
|||
|
|
движении центра масс O и вращатель- |
|||||
|
|
N |
тр. |
||||
|
|
|
|
ном движении относительно оси, про- |
|||
h |
S |
|
ходящей |
через центр |
масс. Запишем |
||
|
уравнение |
динамики |
поступательного |
||||
|
|
|
|||||
|
|
mgr |
|
движения для этого случая: |
|
||
|
α |
|
|
mgr + Fтр. |
+ Nr = mar, |
(1) |
|
|
|
|
|
||||
|
|
|
|
|
|||
Рис. 1
где a – ускорение центра тяжести цилиндра вдоль наклонной плоскости.
Так как цилиндр во время движения остается на плоскости, то ускорение центра масс в направлении нормали к наклонной плоскости равно нулю, следовательно, уравнение (1) в проекции на нормаль к плоскости примет следующий вид
mgcosα − N = 0. |
(2) |
Уравнение динамики поступательного движения вдоль наклонной плоскости определяется силой трения Fтр. и составляющей силы тяжести вдоль наклонной плоскости mgsinα, следовательно, уравнение (1) в проекции на плоскость примет следующий вид:
ma = mgsinα − Fтр., |
(3) |
Уравнение динамики вращательного движения относительно оси, прохо-
16
дящей через центр масс, имеет вид |
|
Iε = Fтр.R, |
(4) |
где I – момент инерции относительно оси, проходящей через центр масс, ε – угловое ускорение. Момент силы тяжести mg и момент силы реакции опоры N
относительно этой оси равен нулю.
Уравнения (3) и (4) справедливы всегда, вне зависимости от того, движется цилиндр по плоскости со скольжением или без скольжения. Но из этих уравнений нельзя определить три неизвестные величины: Fтр., a и ε, необходимо еще одно дополнительное условие.
Если к центру масс цилиндра приложена сила, которая не превышает значение максимальной величины силы трения покоя, то качение цилиндра по наклонной плоскости происходит без скольжения. Это означает, что соприкасающиеся точки цилиндра и плоскости не скользят друг относительно друга вдоль поверхности соприкосновения, между ними действуют силы трения покоя. В этом случае центр масс цилиндра (и его ось) имеют такие же мгновенные значения линейной скорости υ и линейного ускорения a относительно плоскости, что и точки на поверхности цилиндра, соприкасающиеся с поверхностью, относительно оси симметрии цилиндра. Ускорение a и угловое ускорение ε связаны соотношением
a = Rε. |
(5а) |
Линейная скорость υ и угловая скорость ω связаны соотношением
υ = Rω. |
(5б) |
Из уравнения (5а) ε = a/R. После подстановки в (4) получаем
F |
= |
Ia |
. |
|
|
(6) |
|
|
|
||||
тр. |
|
R2 |
|
|
|
|
Заменив в (3) Fтр. на (6), получаем |
|
|
|
|
|
|
ma = mg sin α − |
Ia |
. |
(7) |
|||
|
||||||
|
|
|
|
R2 |
|
|
Из последнего соотношения определяем линейное ускорение
17
a = |
mg sin α |
= g |
|
|
sin α |
|
|
|
|||
|
|
|
|
|
. |
(8) |
|||||
|
m + |
I |
|
1 |
+ |
I |
|||||
|
R2 |
mR2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
Из уравнений (6) и (8) можно вычислить силу трения:
F |
= |
|
mg sin α |
|
|
|
|
тр. |
|
|
|
2 |
|
. |
(9) |
|
|
1+ mR |
|
|
|
||
|
|
|
I |
|
|
|
|
Сила трения покоя зависит от угла наклона α, силы тяжести mg и от отношения
I/mR2.
При качении без скольжения играет роль сила трения покоя. Без силы трения качения не будет. Но с другой стороны, сила трения покоя не может превысить некоторого максимального значения Fтр.макс., которое называется максимальным значением силы трения покоя. Сила трения покоя, имеет максимальное значение, равное μN, где μ – коэффициент трения. Если внешняя сила, приложенная к центру масс цилиндра, направленная вдоль плоскости, превышает это значение, то качение цилиндра вдоль наклонной плоскости будет происходить с проскальзыванием, выражения (5а) и (5б) перестают быть справедливыми. Тогда условия для качения без скольжения будут выполняться в том случае, если
Fтр. ≤ Fтр.макс. = μN. |
(10) |
|||||||
Учитывая (2), (9) и (10), получим |
|
|
|
|
|
|||
|
|
mg sin α |
|
≤ μmg cosα, |
(11) |
|||
|
|
|
mR |
2 |
|
|
||
|
|
|
|
|
||||
|
1+ |
|
|
|
|
|
||
|
|
|
|
|
||||
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или, окончательно |
|
|
|
|
|
mR |
2 |
|
|
|
|
|
(12) |
|
tgα ≤μ 1+ |
I |
|
. |
|
|
|
|
|
В общем случае момент инерции однородных симметричных тел вращения относительно оси, проходящей через центр масс, можно записать как
I = kmR2, |
(13) |
18
где k = 0,5 для сплошного цилиндра (диска); k = 1 для полого тонкостенного цилиндра (обруча); k = 0,4 для сплошного шара.
После подстановки (13) в (12) получаем окончательный критерий скатывания твердого тела с наклонной плоскости без проскальзывания:
|
1+ k |
(14) |
tgα ≤ μ |
. |
|
|
k |
|
Поскольку при качении твердого тела по твердой поверхности сила трения качения мала, то полная механическая энергия скатывающегося тела постоянна. В начальный момент времени, когда тело находится в верхней точке наклонной плоскости на высоте h, его полная механическая энергия равна потенциальной:
Wп = mgh = mgSsinα, |
(15) |
где S – путь, пройденный центром масс.
Кинетическая энергия катящегося тела складывается из кинетической энергии поступательного движения центра масс со скоростью υ и вращательного движения со скоростью ω относительно оси, проходящей через центр масс:
W |
= |
mυ2 |
+ |
Iω2 |
. |
(16) |
|
|
|||||
к |
2 |
2 |
|
|
||
Преобразуем выражение для кинетической энергии (16), подставив в него (5б) и (13):
W = mυ2 |
+ |
Iω2 |
= mR2ω2 |
+ kmR2ω2 |
= (1+k )mR2ω2 . |
(17) |
|
|
|||||||
к |
2 |
2 |
2 |
2 |
2 |
|
|
|
|
||||||
Движение по наклонной плоскости является равноускоренным и зависимость пути от времени определяется выражением:
|
|
S = |
at2 |
|
|
(18) |
||
|
|
2 |
. |
|
|
|||
|
|
|
|
|
|
|
|
|
Преобразуем (18) с учетом (5а): |
|
|
|
|
|
|
|
|
S = |
at2 |
= |
Rεt |
2 |
Rωt |
. |
(19) |
|
2 |
|
2 |
= |
2 |
||||
|
|
|
|
|
|
|||
19

Решая совместно (17) и (19), получим окончательное выражение для кинетической энергии тела, катящегося по наклонной плоскости в конце пути:
W = |
2(1+ k )mS 2 |
. |
(20) |
|
t2 |
||||
к |
|
|
Отметим, что выражение (20) справедливо в случае качения абсолютно недеформируемого цилиндра по абсолютно недеформируемой поверхности, при котором не будет потери энергии на трение, хотя сила трения покоя существует и обеспечивает качение. Однако в реальных условиях имеются потери
υr
Fr
υr
Fr
а |
б |
Рис. 2
кинетической энергии даже при качении без скольжения. Это происходит, потому что деформации не являются абсолютно упругими. Рассмотрим ситуацию, представленную на рис. 2. При деформации цилиндр «сплющивается», что в увеличенном размере показано на рис. 2, пунктиром обозначен нижний обод цилиндра при отсутствии его деформации. В случае упругой деформации (рис. 2а) равнодействующая сил на цилиндр со стороны поверхности проходит через центр цилиндра и имеет лишь вертикальную составляющую, которая уравновешивает его силу тяжести. Никакой горизонтальной силы нет. Следовательно, не возникает и сила трения качения. Равен нулю также момент силы относительно центра цилиндра, значит, нет торможения вращательного движения. Если деформация является неупругой (рис. 2б), то равнодействующая сила не проходит через центр цилиндра и имеет горизонтальную составляющую, которая направлена против скорости движения и является силой трения качения. Момент равнодействующей также не равен нулю и тормозит вращательное движение. В результате действия сил трения качения кинетическая энергия превращается во внутреннюю через посредство неупругих деформаций.
20