

Условия теоремы Куна-Таккера
Условие задания:
=[4;4]
Составляем функцию Лагранжа:

здесь
 – левые части ограничений, приведенных
к нулевой правой части;
– левые части ограничений, приведенных
к нулевой правой части;
 – неопределенные множители Лагранжа.
– неопределенные множители Лагранжа.

Точка
экстремума является седловой точкой с
минимумом по x и
максимумом по ,
поэтому ограничения приведены к виду
 :
:

Условия теоремы Куна – Таккера записываем следующим образом:
Частные производные функции Лагранжа определяются выражениями:


Для того, чтобы вышеуказанные выражения имели вид равенств, введем в них дополнительные переменные:

Решение этой системы из четырех алгебраических уравнений, содержащих восемь неизвестных, можно найти с помощью симплекс-процедуры. На первом шаге в базис включаются все введенные дополнительные переменные. Строка для функции цели отсутствует.
Проведем симплекс – преобразования и найдем допустимое базисное решение. Если решение удовлетворяет условию оптимальности:
то оно является оптимальным.
Таблица 2.3
-
БП
Св.чл
НП
x1
x2
λ1
λ2
v1
-4
6
-2
4
1
v2
-5
-2
8
-7
7
w1
-7
4
-7
0
0
w2
42
1
7
0
0
Таблица 2.4
-
БП
Св.чл
НП
x1
x2
v2
λ2
v1
-6,857
4,8571
2,5714
0,5714
5
λ1
0,7143
0,2857
-1,143
-0,143
-1
w1
-7
4
-7
0
0
w2
42
1
7
0
0
Таблица 2.5
-
БП
Св.чл
НП
v2
w1
v1
λ2
v1
-9,429
6,3265
0,3673
0,5714
5
λ1
1,8571
-0,367
-0,163
-0,143
-1
x2
1
-0,571
-0,143
0
0
w2
35
5
1
0
0
Полученное решение удовлетворяет следующим условиям:
Следовательно, координаты точки экстремума x*:
 ;
;
А функция цели в этой точке имеет значение:

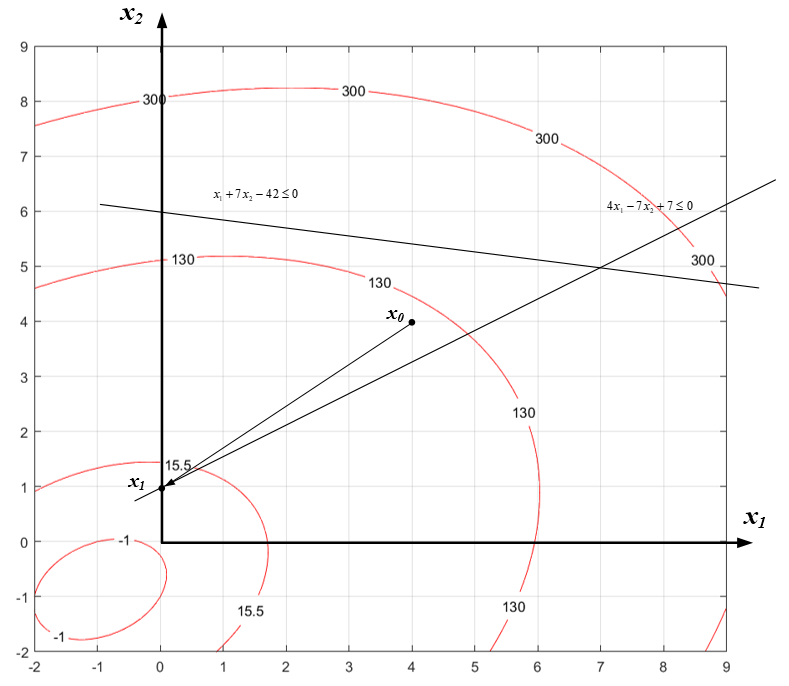
Рисунок 2.7 – Графическая интерпретация метода Куна-Таккера