

10546
.pdfИногда по заданному углу между прямыми и известному угловому коэффициенту одной из прямых нужно найти угловой коэффициент другой прямой. Поэтому нужно быть внимательными при применении формулы (10.1). Чтобы подчеркнуть, какой угол вычисляется по этой формуле, в ней ставят стрелку, показывающую, что угол отсчитывается от прямой с угло-
вым коэффициентом |
k1 до прямой с угловым коэффициентом k2 . |
||
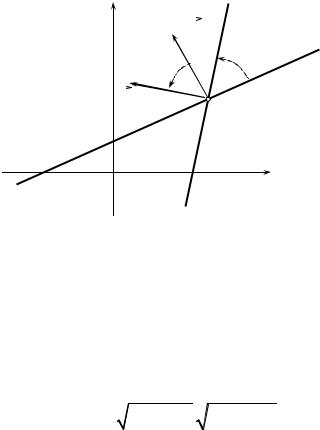
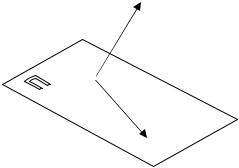
Пример. |
В |
плоскости луч |
света направлен по прямой |
L1 : x − 2y + 5 = 0 |
и дойдя до прямой |
L2 : 3x − 2y + 7 = 0 от неё отразился. |
|
Получить уравнение прямой, по которой направлен отражённый луч.
|
|
|
|
3 |
− |
1 |
|
|
|
|
|
|||
Вычисляем тангенс угла «падения» |
tgϕ = |
|
2 |
2 |
|
= |
4 |
(см. рис. 10.2) |
||||||
|
|
|
|
|
|
|||||||||
|
|
3 |
|
|
|
|
|
|||||||
|
|
1+ |
|
|
1 |
7 |
|
|||||||
|
|
2 |
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
k3 = ?
|
k |
|
= |
3 |
|
|
2 |
|
|
||
|
|
2 |
|
||
|
|
|
|
||
L1 |
α |
|
|
|
|
ϕ |
|
k1 = |
1 |
||
|
|
||||
|
|
||||
M0 |
|
2 |
|||
L2
Рис. 10.2
Из аналогичной формулы для тангенса угла «отражения» α
tgα = |
4 |
= |
|
− |
3 |
|
|
+ |
3 |
|
|
|
|
k3 |
|
|
1 |
|
k3 |
|
|||||
7 |
2 |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
||||
получаем угловой коэффициент k3 = 29/ 2 |
прямой, по которой направлен |
|||||||||||
отражённый луч. Находим координаты точки M0(−1,2) пересечения прямых L1 и L2 , решив систему уравнений
3x − 2y + 7 = 0x − 2y + 5 = 0.
Из уравнения пучка прямых y − y0 = k(x − x0 ) получаем уравнение искомой прямой 29x − 2y + 33 = 0.
71
Вернемся к формуле (10.1) и получим условия перпендикулярности
и параллельности двух прямых y = k1x + b1, |
y = k2 x + b2 , выраженные |
|||||||||||||
через их угловые коэффициенты: |
|
|
|
|
|
|
|
|
|
|||||
L |
L k |
2 |
= − |
1 |
; L |
|
2 |
|
k |
= k |
2 |
. |
||
|
L |
|||||||||||||
|
||||||||||||||
1 |
2 |
|
k1 |
1 |
|
|
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В последнем случае, если дополнительно b1 = b2 , то прямые L1 и L2 совпадают.
Пусть теперь прямые L1 и L2 заданы общими уравнениями
A1x + B1 y + C1 = 0 , A2 x + B2 y + C2 = 0. |
(10.2) |
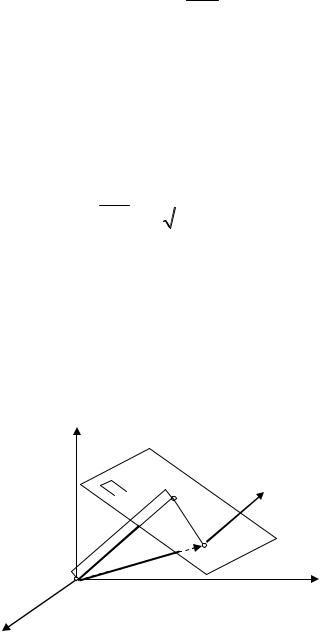
Сведём вычисление угла α между прямыми к вычислению угла ϕ между нормальными векторами к этим прямым. Заметим, что угол между прямыми может быть только острым, а угол между векторами может быть и тупым. Поэтому, если угол ϕ между векторами N1 = { A1,B1} и N2 = { A2,B 2}
острый, то α = ϕ (см. рис.10.3).
y |
|
|
|
|
|
L2 |
|
|
|
|
N1 |
||
|
|
|
ϕ |
|
|
α |
|
|
|
|
|
L1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N2 |
|
|
|
||
O |
x |
|
Рис. 10.3 |
Если же угол ϕмежду нормальными векторами тупой, то α = π − ϕ (см. рис. 10.4). Поскольку cosα = −cosϕ, то cosα =|cosϕ |. Таким образом, для вычисления угла между прямыми получаем формулу
cosα = |
|
|
| A1A2 + B1B2 | |
|
|||
|
|
|
|
|
|
|
|
A |
2 + B 2 |
|
A 2 |
+ B 2 |
|
||
|
|
|
|
||||
1 |
1 |
2 |
2 |
|
|||
72
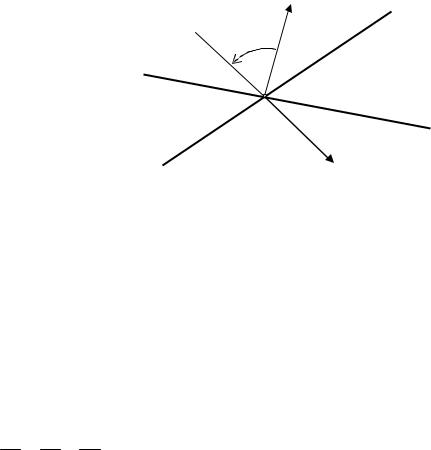
N2 |
L1 |
|
α |
||
|
 ϕ
ϕ  α
α
L2
N1
Рис. 10.4
В частности:
L1 L2 A1A2 + B1B2 = 0;
L |
|
L |
A1 |
= |
B1 |
. |
|
||||||
|
|
|
||||
1 |
|
2 |
A2 |
|
B2 |
|
|
|
|
|
|||
В последнем случае, если дополнительно выполняется равенство
A1 = B1 = C1 , (10.3)
A2 B2 C2
то эти прямые совпадают.
Обратим внимание на связь полученных условий взаимного расположения прямых с условиями разрешимости системы (10.2) двух линейных уравнений с двумя неизвестными. Определитель этой системы
|
= |
A1 |
B1 |
= AB − A B . |
|||
|
|
A2 |
B2 |
1 |
2 |
2 |
1 |
|
|
|
|
|
|
||
Если |
≠ 0, то, как известно, |
система имеет единственное решение, |
|||||
которому |
соответствует точка пересечения прямых L1 и L2 . Если = 0, |
||||||
то выполнено условие параллельности этих прямых. При этом возможны два случая. В первом, когда выполнено условие (10.3), прямые совпадают, и система имеет бесконечное множество решений (координаты любой точки прямой дают решение системы). Отметим, что условие (10.3) означает, что ранг расширенной матрицы совпадает с рангом матрицы системы, т.е.
|
A |
B |
C |
|
|
A |
B |
|
=1, |
rang |
1 |
1 |
1 |
|
= rang |
1 |
1 |
|
|
|
A2 |
B2 |
C2 |
|
A2 |
B2 |
|
||
73

и согласно теореме Кронекера-Капелли система совместна. Во втором случае, когда в условии (10.3) не выполнено второе равенство, прямые параллельны, ранг расширенной матрицы больше ранга матрицы системы, и система несовместна.
10.2. Пучок прямых, определяемый двумя пересекающимися прямыми. Иногда при решении задач не следует спешить с нахождением точки пересечения двух прямых, решая систему уравнений (10.2), а лучше воспользоваться понятием пучка прямых, проходящих через точку пересечения этих прямых (в частности, когда нужно найти прямую, проходящую через точку пересечения данных прямых, и удовлетворяющую некоторому дополнительному условию). Уравнение пучка прямых, проходящих через точку пересечения двух заданных прямых
A1x + B1 y + C1 = 0 , A2 x + B2 y + C2 = 0
имеет вид
(A1x + B1 y + C1) + λ(A2x + B2 y + C2 ) = 0 . |
(10.4) |
Действительно, уравнение (10.4) – уравнение прямой. Так как точка пересечения этих прямых M0 (x0, y0 ) принадлежит каждой из этих прямых, то ее координаты обращают в ноль обе скобки в (10.4), а, значит, при любом λ прямая (10.4) проходит через точку M0 .
10.3. Расстояние от точки до прямой. Пусть требуется вычислить
расстояние отточкиM0 (x0, y0 ) |
до прямой Ax + By + C = 0. |
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
x |
|
|
|
|
Рис. 10.5 |
|
ПустьM1(x1, y1)– проекция точкиM0 на прямую (см. рис. 10.5). Искомое расстояние равно абсолютной величине проекции вектора M1M0 на направление нормального вектора N ={ A,B} .
74
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− x ) |
+ B( y |
|
− y ) |
|
|||
|
|
|
< N,M |
M |
|
|
> |
|
|
|
A( x |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
0 |
|
|
|
|
|
|
|
0 |
1 |
|
0 |
1 |
|
||||||
d = |
M1M0 |
= |
|
|
|
|
|
|
= |
|
|
|
|
= |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ПрN |
|
|
|
|N | |
|
|
|
|
|
|
|
|
|
|
|
|N | |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
= |
|
Ax |
|
+ By |
|
− |
Ax |
− By |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
1 |
|
|
|
1 |
|
. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|N | |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Так как точка |
M1(x1, y1) |
принадлежит прямой, то Ax1 + By1 = −C , |
|||||||||||||||||||||||||||
поэтому окончательно получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
d = |
|
|
Ax0 |
+ By0 + C |
|
. (10.5) |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
A2 |
+ B2 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Найдём координаты точки M1(x1, y1). Для этого выразим вектор
M1M0 через найденное расстояниеd и единичный вектор N / | N |, нормальный кпрямой
|
= ± |
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M |
1 |
M |
0 |
|
N .(10.6) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
| N | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из формулы (10.5) видно, что знак проекции вектора M1M0 |
определяется- |
|||||||||||||||||||||||
знаком |
|
выражения Ax0 + By0 + C , |
т.е., |
если |
|
|
|
Ax0 + By0 + C > 0 , то |
||||||||||||||||
M1M0 ↑↑ N и в формуле (10.6) нужно взять знак плюс. |
|
|||||||||||||||||||||||
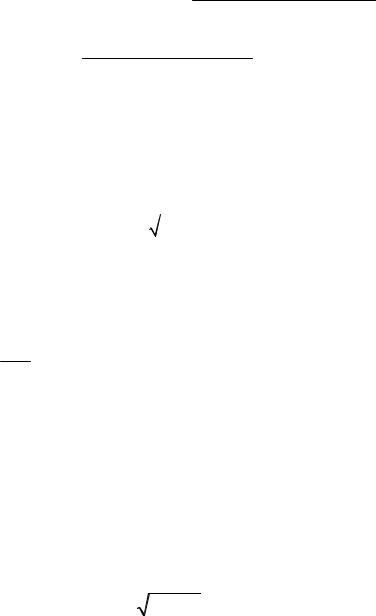
Пример. Найти проекцию точки |
|
M0 (1,8) на прямую |
3x − 4y + 4 = 0 |
|||||||||||||||||||||
Вычисляем расстояние точки |
M0 до прямой |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
d = |
|
|
3 1− 4 8 + 4 |
|
|
= |
| −25| |
= 5. |
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
3 |
+ 4 |
2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
Попутно выясняется, чтоM1M0 ↑↓ N , поэтому формула (10.6) даёт равен- |
||||||||||||||||||||||||
ство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
= {1− x ;8 |
− y }= − |
5 |
|
|
|
|||||||||||||
|
|
|
|
|
|
M |
M |
|
|
|
{3; 4}. |
|
||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
1 |
|
5 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Отсюда, приравнивая координаты векторов, получаем координаты точки M1(4,4) (см. рис. 10.6).
75
M0 (1,8)
M1(?,?) |
N = {3; |
−4} |
|
|
Рис. 10.6
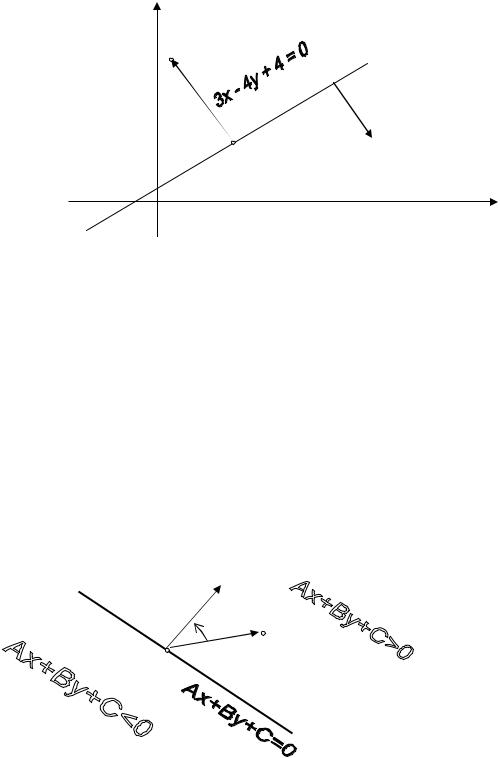
10.4. Линейные неравенства. В заключение этой лекции выясним геометрический смысл неравенства
Ax + By + C > 0. (10.7)Построим прямую
Ax + By + C = 0 (10.8)
и нормальный к ней вектор N ={ A,B} .Нас интересует множество точек
M(x, y), координаты которых удовлетворяют неравенству (10.7). Возьмём на прямой (10.8) произвольную, но фиксированную точку M0 (x0 , y0 ).
N
ϕ
M(x, y)
M0
Рис. 10.7
Поскольку Ax0 + By0 + C = 0, то, выражая отсюда C и подставляя в (10.7), получим, что левая часть этого неравенства (10.7)равна скалярному произведению вектора N ={ A,B} на вектор M0M
76
< N,M0M > = A(x − x0 ) + B(y − y0 ) > 0 .
Итак, неравенству (10.7) удовлетворяют все точки плоскости, для которых угол между векторами N и M0M – острый. Из рисунка 10.7 видно, что все такие точки принадлежат одной полуплоскости. Чтобы выяснить, какая из двух полуплоскостей «отвечает» неравенству (10.7), достаточно проверить его выполнение для какой-нибудь одной точки из любой полуплоскости. Если координаты этой точки ему удовлетворяют, то и координаты всех точек полуплоскости, в которой выбрана «пробная» точка, будут его решениями, если нет – то нужная полуплоскость – другая.
77
Лекция 11. Плоскость
11.1. Различные виды уравнения плоскости. Перейдем теперь к изучению уравнений плоскости в пространстве. Пусть в трехмерном пространстве с декартовой прямоугольной системой координат имеем плоскость П , и мы хотим получить уравнение, связывающее координаты любой точки, принадлежащей этой плоскости.
N
M0
 900
900
 M
M
Рис.11.1
Для этого зафиксируем какую-нибудь точку M0(x0 , y0 ,z0 ) П и возьмем вектор, перпендикулярный (ортогональный, нормальный) к этой плоскости. Пусть это будет вектор N ={ A,B,C} . Очевидно, что для произволь-
ной точки M(x, y,z) П векторы M0M = { x − x0; y − y0;z − z0}и N перпендикулярны, т.е. их скалярное произведение равно нулю
< N,M0M > = 0
или в координатах
A(x − x0 ) + B(y − y0 ) + C(z − z0 ) = 0 . (11.1)
Это и есть уравнение плоскости П , проходящей через заданную точку M0 (x0, y0,z0 ) перпендикулярно заданному вектору N ={ A,B,C}
.Раскрывая в (11.1) скобки, получим уравнение
Ax + By + Cz + D = 0, (11.2)
где для краткости обозначено D = −Ax0 − By0 − Cz0 . Уравнение (11.2) называют общим уравнением плоскости. Обратим внимание, что уравнение плоскости является линейным уравнением относительно переменных x, y,z, а коэффициенты при них – соответствующие координаты нормального вектора к этой плоскости.
78
Обратно, покажем, что уравнение вида(11.2) определяет плоскость и построим её. По данным числам A,B,C построим вектор N = { A,B,C} и
введем радиус-вектор r = { x, y,z} . Тогда уравнение (11.2) можно представить в виде
< N,r > + D =0 |
или | N |Пр |
r = −D . |
||
|
|
|
N |
|
Отсюда |
|
|
|
|
ПрN r = − |
D |
, |
|
|
|
|
| N | |
|
|
т.е. все радиус-векторы r = { x,y,z}, координаты которых удовлетворяют уравнению (11.2), имеют одну и ту же проекцию на вектор N = { A,B,C}. Это означает, что точки M(x, y,z) принадлежат плоскости, перпендику-
лярной вектору N = { A,B,C} |
и отстоящей от начала координат на рас- |
||||||
стояние | p|, где |
|
|
|
|
|
|
|
p = − |
D |
= − |
|
D |
|
. |
|
|
|
|
|||||
A2 + B2 + C2 |
|||||||
|
| N | |
|
|
||||
Отсюда следует алгоритм построения плоскости по заданному уравнению (11.2). Через начало координат проведем прямую в направлении
вектора |
N = { A,B,C} и отложим на ней от начала координат отрезок OP |
длиной |
| p|в направлении вектора N = { A,B,C}, если p > 0, или в про- |
тивоположном направлении, если p < 0. Через конец этого отрезка P проводим перпендикулярно ему требуемую плоскость.
z
|
|
P |
|
N |
|
|
|
|
|
|
p |
|
M |
y |
|
r |
|
||
O |
|
|
||
|
|
|
|
x
Рис. 11.2
Рассмотрим некоторые частные случаи общего уравнения плоскости. Пусть один из коэффициентов перед переменными в уравнении (11.2) равен нулю (например,C = 0). Тогда нормальный вектор этой плоскости
79
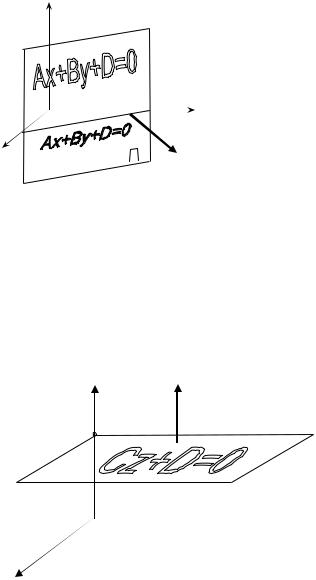
N ={A,B,0}. Это значит, что он перпендикулярен оси Oz , а плоскость параллельна этой оси
z
O
y
x |
N ={A,B,0} |
Рис. 11.3
Теперь пусть два каких-нибудь коэффициента перед переменными в уравнении(11.2) равны нулю (например, A = B = 0). Тогда нормальный вектор N ={0,0,C} перпендикулярен плоскости xO y , а плоскость параллельна этой координатной плоскости
zN ={0,0,C}
O  y
y
x
Рис. 11.4
Рассмотрим ещё случай, когда в уравнении (11.2) D = 0. Это означает, что точка (0,0,0) принадлежит плоскости
Ax + By + Cz = 0
или, другими словами, эта плоскость проходит через начало координат. Для наглядного представления расположения этой плоскости найдем
её следы, т.е. линии пересечения с координатными плоскостями (см. рис. 11.5).
80