

книги / Нечёткое, нейронное и гибридное управление
..pdfкрыть». Если файла с настройками не существует, то надо ввести веса терм дефаззификатора и расположение терм отклонения и производной фаззификатора, после чего нажать кнопку «Обновить», сохранить сделанные настройки в файл, для этого войти в меню «Файл», выбрать «Сохранить настройки», в открывшемся окне ввести имя файла и нажать кнопку «Сохранить», после этого открыть файл с настройками, как это было описано выше.
Рис. 1.64. Интерфейс программы лабораторной установки
Описание программы
2)Ввести значение длины стержня в метрах.
3)Ввести массу маятника в килограммах.
4)Ввести массу платформы в килограммах.
5)Нажать кнопку меню «Установка начальных условий».
6)Задать отклонение стержня маятника, передвинув ползунок влево или вправо, в окне «Отклонение» появится угол выбранного отклонения в радианах.
7)Нажать кнопку меню «Моделирование».
База знаний состоит из 144 ячеек. Двенадцать терм фаззификатора ошибки, двенадцать терм производной отклонения и двенадцать терм дефаззификатора. Веса терм дефаззификатора задаются
121
в единицах измерения силы (Ньютон) и определяют силу, приложенную к тележке. В анализаторе отклонение и производная отклоненияумножается на11,5. Шаг моделированияи шаграсчётаравен 1 мс.
Проведение активного эксперимента
1.Работая с FUZZY-регулятором, задать значения терм фаззификатора и дефаззификатора.
2.Исследовать влияние изменения параметров терм фаззификатора и дефаззификатора на качество переходного процесса.
3.Исследовать влияние изменения длины стержня, массы маятника, и массы тележки перевернутого маятника на качество переходного процесса.
4.Исследовать динамику работы системы управления математического маятника при различных значениях начального угла поворота маятника.
5.Сделать выводы по проведенной работе.
1.15.4. Нечеткое управление душем
Пример 1.27. Разработать нечеткий регулятор душа.
На рис. 1.65 показана схема нечеткого управления душем [6]. Для построения нечеткой системы управления душем выбраны
две лингвистических переменных: температура воды на выходе смесителя; угол поворота крана горячей воды.
Матрица решений составлена из опыта эксплуатации душа:
–если вода на выходе горячая, то следует повернуть кран горячей воды на большой угол против часовой стрелки;
–если вода не очень горячая, то следует повернуть кран горячей воды на небольшой угол против часовой стрелки;
–если вода теплая, то кран горячей воды не крутить;
–если вода прохладная, то кран горячей воды повернуть по часовой стрелке на небольшой угол;
–если вода холодная, то кран горячей воды повернуть по часовой стрелке на большой угол.
122
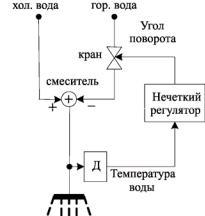
Рис. 1.65. Нечеткое управление душем
Зададимся универсумом по температуре 0…100 °С и универсумом по углу поворота крана горячей воды –90…+ 90 угловых градусов. Каждая лингвистическая переменная представлена пятью термами (нечеткими подмножествами).
Подмножества лингвистической переменной температура воды на выходе: холодная вода (ОМ) +10…+30 °С; прохладная вода (ОС) +20…+50 °С; теплая вода (Н) +40…+60 °С; не очень горячая вода (ПС) +50…+80 ° С; горячая вода (ПБ) +80…+100 °С.
Подмножества лингвистической переменной угол поворота крана горячей воды: большой угол поворота по часовой стрелке (ОБ) –90…–50) угл. град.; небольшой угол поворота по часовой стрелке (ОС) (–75…0) угл. град.; норма (Н) –25…+25 угл. град; небольшой угол поворота против часовой стрелки (ПС) 0…+75 угл. град.; большой угол поворота против часовой стрелке (ПБ) +50…+90 угл. град.
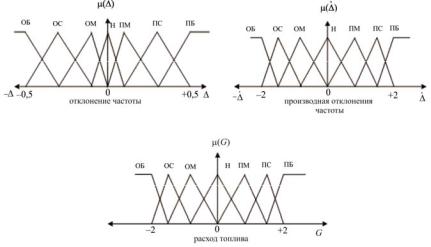
На рис. 1.66 приведено терм-множество фаззификатора, на рис. 1.67 – терм-множество дефаззификатора нечеткого регулятора.
123

Рис. 1.66. Терм-множество фаззификатора нечеткого регулятора
Рис. 1.67. Терм-множество дефаззификатора нечеткого регулятора
1.15.5. Нечеткий регулятор частоты вращения свободной турбины ГТД
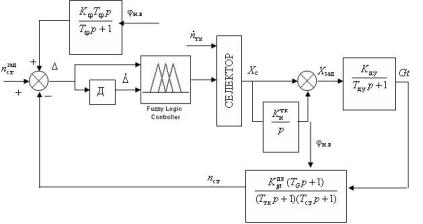
Рассматривается комбинированная система, состоящая из контура ограничения ускорения частоты вращения турбокомпрессора nтк (классический регулятор) и контура частоты вращения свобод-
ной турбины (нечеткий регулятор) (рис. 1.68). Для нечеткого регулятора определены следующие входные переменные: ошибка , представляющая собой рассогласование между требуемой и фактической частотой вращения свободной турбины, и скорость изменения ошибки . Управляющей переменной является сигнал , подаваемый на селектор. Три лингвистические переменные – ошибка ,
124
скорость изменения ошибки и управляющая переменная output 1 – были представлены в виде семи терм: ОБ – отрицательное большое; ОС – отрицательное среднее; ОМ – отрицательное малое; Н – норма; ПМ – положительное малое; ПС – положительное среднее; ПБ – положительное большое (рис. 1.69). Были выбраны соответствующие им функции принадлежности. Как видно из рис. 1.69, для терм трех лингвистических переменных были выбраны t-, -, L-функции при-
надлежности.
Рис. 1.68. Структурная схема контура частоты вращения свободной турбины с нечетким регулятором
Стратегия управления нечеткого регулятора закладывается в таблице правил. В данном нечетком регуляторе имеется три коэффициента масштабирования: GP, GD, GU – для ошибки, скорости изменения ошибки и выходного сигнала регулятора соответственно. Данные коэффициенты должны быть выбраны в процессе моделирования нечеткого регулятора.
Таблица правил нечеткого регулятора формируется на основе знаний, в данном случае – на основе численных данных работы уже синтезированного исходного регулятора частоты вращения свободной турбины [50]. Оптимальные диапазоны изменения ФП для каж-
125
дой переменной, а также метод дефаззификации определяются итерационным методом проб и проверок в процессе моделирования при помощи инструментов графического интерфейса пользователя (GUI) пакета.
Рис. 1.69. Термы входных и выходной переменных нечеткого регулятора
Fuzzy Logic Toolbox системы Matlab-Simulink. Для проверки работоспособности нечеткого регулятора и сравнения результатов моделирования в Matlab-Simulink составлена математическая модель исследуемой системы автоматического управления и объекта управления (рис. 1.70). Линейная модель ГТД представлена блоком MODDV, линейная модель гидромеханической части представлена блоком MODGM, модель электронного регулятора двигателя, включающая контур ускорения частоты вращения турбокомпрессо-
ра и селектор контуров управления, представлена блоком RED. Модели двигателя и гидромеханической части рассчитываются
с шагом интегрирования 0,004 с, модель RED рассчитывается с шагом 0,024 с. Ошибка регулирования контура частоты вращения свободной турбины t, поступающая на вход нечеткого регулятора
126
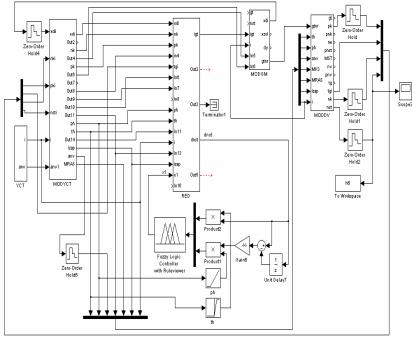
(Fuzzy Logic Controller), формируется в блоке RED. Выходной сигнал нечеткого регулятора поступает на вход селектора контуров управления.
Рис. 1.70. Математическая модель исследуемой системы автоматического управления в Matlab-Simulink
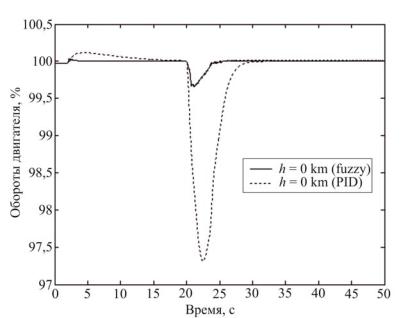
Проверка работоспособности нечеткого регулятора оценивалась при следующих условиях: поддержание частоты вращения свободной турбины пс.т при изменении угла несущего винта н.в с 7,46 до 19 º; поддержание частоты вращения свободной турбины пс.т при н.в = 19º; параметры воздуха на входе ГТД на высоте h = 0 км
(Твх = 15 ºС, Рвх = 1,033 кг/см2); параметры воздуха на входе ГТД на высоте h = 6 км (Твх = –24 ºС; Рвх = 0,481 кг/см2).
127
Программное значение частоты вращения свободной турбины – 100 %. Время подачи возмущения по углу несущего винта, изменяющее потребную мощность воздушного винта для всех условий, – 20 с. Время моделирования – 50 с. После настройки параметров ФП в пакете Fuzzy Logic Toolbox определены диапазоны изменения входных переменных: [–2, 2], [–0,5, 0,5], выходной перемен-
ной [–2, 2] при Твх = 15 ºС; Рвх = 1,033 кг/см2 (h = 0 км). Всего бы-
ло сформулировано 25 правил. Метод дефаззификации – bisector. Результаты моделирования показали, что для обеспечения требуемых параметров переходного процесса необходимо масштабировать входные переменные нечеткого регулятора в зависимости от температуры Твх и давления Рвх на входе в двигатель.
Для улучшения качества переходных процессов в системе регулирования с нечетким регулятором в процессе выполнения работы нечеткий регулятор был модифицирован. В нем расширен диапазон изменения функций принадлежности выходной переменной до [– 4, 4]. Вследствие увеличения избытка топлива в переходном режиме время переходного процесса и провал по частоте вращения свободной турбины стали меньше (рис. 1.71, 1.72).
Реализацию разработанной методики проектирования нечеткой системы можно осуществить с использованием CAD-системы fuzzy TECH 3.0. Процесс разработки проекта нечеткой системы управления на fuzzy TECH 3.0 разбивается на четыре основных этапа.
а) описание системы: задание лингвистических переменных, задание нечетких правил, задание метода дефаззификации;
б) off-line оптимизация: отладка на программной модели, всесторонний анализ модели. На этом этапе следует проверить работоспособность созданной системы посредством всех средств fuzzy TECH 3.0. Для связи системы управления объекта управления с моделью используется специально разработанный протокол связи fTlink, в основу которого положена концепция обмена сообщениями Windows. Все необходимые средства для установления связи с мо-
128
делью находятся в исходных текстах программ связи, поставляемых с пакетом;
в) on-line оптимизация на физической модели объекта. На этом этапе разрабатываемая система управления и реальный объект управления соединяются физической линией связи;
г) реализация: генерация ассемблерного кода, С – код, прошивка ПЗУ. На этом этапе необходимо получить окончательный ответ варианта кода для конкретного микроконтроллера и, если нужно, связать его с основной разработанной программой. Основу программного кода, генерируемого пакетом fuzzy TECH 3.0, составляет аппаратно ориентированное на конкретный тип процессора ядро. Поставляемое с пакетом fuzzy TECH MCU-96 программное ядро совместимо с такими контроллерами, как 8096 BH, 8096-90, 80196 KB/KC/KD, 80196 KR, 80196 MC, 80196 NT/NQ.
129
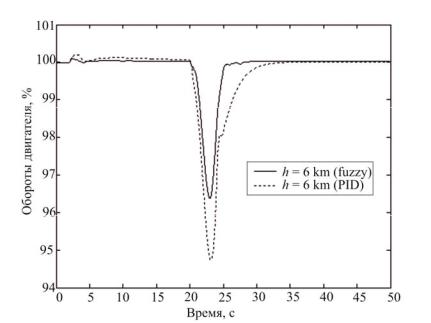
Рис. 1.71. Переходные процессы в системе с модифицированным нечетким регулятором при Твх = 15 ºС; Рвх = 1,033 кг/см2 (h = 0 км)
Рис. 1.72. Переходные процессы в системе с модифицированным нечетким регулятором при Твх = –24 ºС; Рвх = 0,481 кг/см2 (h = 6 км)
Недостатки нечетких систем:
–отсутствие стандартной методики проектирования и расчета нечетких систем;
–невозможность математического анализа нечетких систем существующими методами; применение нечеткого подхода по сравнению с вероятностным подходом не приводит к повышению точности вычислений;
–увеличение входных переменных увеличивает сложность вычислений экспоненциально;
–как следствие предыдущего пункта увеличивается база правил, что приводит к трудному ее восприятию.
130