

книги / Строительная механика, динамика и устойчивость композитных конструкций
..pdf
|
|
|
|
|
u |
0 |
|
1 |
|
u |
0 |
|
2 |
|
|
|
v |
|
|
2 |
|
|
w |
|
|
2 |
|
|
|
|
|||||
|
|
|
|
|
x |
|
2 |
|
x |
|
|
|
|
x |
|
|
|
x |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1 |
|
|
|
u0 |
|
|
v1 |
v0 |
|
w1 w0 |
|
|
|||||||||||||||||
|
|
|
|
|
x |
1 |
x |
|
|
x x |
|
x |
x |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
1 |
|
|
u |
|
2 |
|
|
v |
|
2 |
|
|
w |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
2 |
|
|
|
|
|
0 |
' |
|
+ |
2 '' . (1.9.2.3) |
|||||||||||||||||||||||||
|
|
1 |
|
|
1 |
|
|
1 |
|
|
|
||||||||||||||||||||||||
|
2 |
|
x |
|
|
|
|
x |
|
|
|
|
|
x |
|
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|
x |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проделав подобную процедуру для оставшихся геометрических соотношений, можно убедиться, что возмущенное поле деформаций в теле можно представить как
|
|
|
|
0 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
' |
+ |
|
. |
(1.9.2.4) |
||||||||
|
|
|
|
|
|
'' |
|
||||||||
Для упрощения анализа задачи устойчивости примем ряд допущений (или гипотез):
1. Начальное состояние описывается уравнениями линейной теории упругости. Следовательно:
|
|
|
|
|
u0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
u |
|
|
|
v |
|
|
|
|
(1.9.2.5) |
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
||
|
|
|
|
|
y |
|
|
x |
|
|
|
||||
|
|
|
|
|
v |
|
|
w |
|
|
|
|
|
||
|
|
|
|
|
0 |
|
0 |
|
|
|
|
||||
|
|
|
|
|
z |
|
|
y |
|
|
|
||||
|
|
|
|
|
w |
|
|
|
u |
0 |
|
|
|
||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
x |
|
|
z |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
61
|
2. Пренебрегаем изменением формы и размеров тела в перво- |
||||||||||||||||||||||||
начальном состоянии (пренебрегаем членами вида |
|
u0 |
, v0 , |
||||||||||||||||||||||
|
w0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
x |
|
и т. д. в выражении (1.9.2.4)). Тогда |
|
|
|
|
|
|
|
|||||||||||||||||
x |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
v |
|
|
|
|
|
|
(1.9.2.6) |
||||||||||
|
|
|
|
|
|
u |
|
. |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
x |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
w1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
u |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
z |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
определяется следующим образом |
||||||||||||||
|
Компоненты вектора |
|
|||||||||||||||||||||||
|
|
|
|
1 |
|
|
u |
|
2 |
|
v |
|
2 |
|
w |
|
2 |
|
|
|
|||||
|
|
|
|
|
|
x |
|
|
|
x |
|
|
x |
|
|
|
|
|
|||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
.................................................. |
|
(1.9.2.7) |
|||||||||||||||||||
|
|
" |
|
|
|
u1 |
v1 v1 |
|
|
|
|
. |
|
||||||||||||
|
|
|
|
u1 |
w1 w1 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
x |
|
y |
|
x |
y |
|
x y |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
.................................................. |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выражения аналогичны линейной части уравнений (1.9.2.2) для возмущенного поля перемещений u1 .
Подставим соотношение (1.9.2.3) в выражение для полной потенциальной энергии системы в новом, смежном с начальным состоянием. При этом полную потенциальную энергию предста-
62
вим в виде разложения по степеням малого параметра, ограничиваясь линейным и квадратным слагаемыми
Э Э |
0 |
Э |
2Э |
, |
(1.9.2.8) |
|
1 |
2 |
|
|
где Э0 – полнаяпотенциальная энергиявстационарном состоянии. Если рассматривать слагаемое {u1} как вариацию поля перемещений, то слагаемое Э1 (линейное слагаемое разложения по α) по определению будет вариацией потенциальной энергии
стационарного состояния Э1 Э0 .
В свою очередь приращение потенциальной энергии при переходе из начального равновесного состояния в смежное бесконечно близкое состояние равно
|
|
|
Э Э Э0 |
2Э2 . |
|
|
|
(1.9.2.9) |
|
Если действующие на систему нагрузки являются консерва- |
|||||||||
тивными, то их работа |
|
|
|
|
|
|
|||
|
|
A u T q V u T p S |
|
|
|||||
|
|
|
V |
S |
|
|
|
|
|
|
|
u0 T q V u0 T p S |
|
|
|||||
|
|
V |
|
S |
|
|
|
|
|
|
T |
|
T |
|
|
|
|
||
|
|
|
p S |
A0 |
A1 |
, |
(1.9.2.10) |
||
u1 |
q V u1 |
||||||||
|
V |
S |
|
|
|
|
|
|
|
где {q} – объемные силы; {p} – поверхностные силы; V – объем тела; S – поверхность, на которой действуют нагрузки.
A2 0 , и, следовательно, в величину Э2 консервативные си-
лы не входят, а входят только коэффициенты при 2 в выражении для энергии упругого деформирования U.
Таким образом
|
1 |
|
T |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Э2 |
2 V ' |
|
С |
' |
|
|
|
|
С |
|
'' |
|
|
|
'' |
|
С |
|
dV , |
(1.9.2. 11) |
|||
где [С] – матрица жесткости упругого материала.
63

Учитываяусловиеустойчивости, упругая системаприметвид
|
|
1 |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Э Э2 |
|
|
С ' V '' 0 |
0, (1.9.2.12) |
||||||||
|
|
' |
V |
|||||||||
|
|
2 V |
|
|
V |
|
|
|||||
где 0 C 0 – поле начальных напряжений.
Энергетический критерий устойчивости вида (1.9.2.12) известен как условие устойчивости Брайана.
1.9.3.Энергетический критерий устойчивости
вформе Тимошенко
Возмущенно поле перемещений зададим в виде |
|
u u0 u1 2 u2 , |
(1.9.3.1) |
где α – малая величина. Деформации, соответствующие возмущенному состоянию, определим, ограничившись квадратичными слагаемыми
0 2 . |
(1.9.19) |
Если принять гипотезу о справедливости линейной задачи теории упругости для невозмущенного состояния и пренебречь влиянием изменения размеров и формы конструкции до потери
устойчивости, то для векторов 0 и будут справедливы геометрические соотношения Коши (аналогично подходу Брайана), а компоненты тензора деформаций свяжем с полем пе-
ремещений u2 нелинейными геометрическими соотношениями. Подсчитывая значение приращения энергии (с точностью до
постоянного множителя 2 ), получим
Э |
1 T С V T 0 V |
|
||
|
2 V |
V |
|
|
u2 T q V u2 |
T p S |
(1.9.3.3) |
||
|
V |
S |
|
|
64
Используя условие взаимности работ, можно второе слагаемое представить в виде
0 T V , |
(1.9.3.4) |
V |
|
где C и, применяя формулу Остроградского – Гаусса,
перейдем к интегралу по поверхности S. При этом на части контура S1 , где заданы граничные условия в напряжениях
p p0 |
и, следовательно, |
p2 0 . На оставшейся части кон- |
||||||||
тура S2 , соответствующей кинематическим граничным условиям, |
||||||||||
получим |
|
|
|
|
|
|
|
|||
|
|
|
|
u0 p2 S u0 p2 S, |
|
|
(1.9.3.5) |
|||
|
0 |
|
|
S |
S |
|
|
2 |
|
|
где |
– кинематические граничные условия; |
– реакции |
||||||||
U |
|
p |
|
|||||||
связей. |
|
|
|
|
|
|
|
|
||
|
Окончательно критерий устойчивости принимает вид |
|||||||||
|
|
|
|
( Э) 0, |
|
|
|
(1.9.3.6) |
||
где Э |
|
1 |
1 T С 1 V u0 p2 S u2 T q V |
|||||||
|
|
|
2 V |
S |
V |
|
|
|
||
u2 T p S – критерий в форме Тимошенко.
S
В отличие от критерия Брайана, критерий устойчивости (1.9.3.6) не содержит начального поля напряжений 0 , но тре-
бует определения поля дополнительных перемещений u2 ,
удовлетворяющего кинематическим граничным условиям и обеспечивающего условие стационарности Э0 0 .
1.10. Устойчивость стержней
Получим условие устойчивости прямолинейного упругого стержня на основе критерия Брайана (рис. 1.18).
65
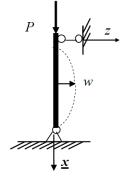
Гипотезы:
1.Ось ненагруженного стержня идеально прямая.
2.Изменением размеров стержня до потери устойчивости пренебрегаем.
3.Изгиб стержня (смежная форма равновесия) описываем в рамках линейной теории изгиба.
В этом случае возмущенное состояние стержня определяется функцией прогиба
|
|
Рис. 1.18. Схема |
|
|
|
|
|
|
|
|
|
|
|
|
u(x) 0 |
|
|
||||||||||
нагружения стержня |
|
|
|
|
|
|
|
|
w(x) |
|
. |
(1.10.1) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v(x) 0 |
|
|
||
|
|
|
Тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
d 2 w |
|
|
|
|
|
1 |
dw 2 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
z |
dx |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
dx |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
– начальные деформации (1.10.2) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
. |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Э |
1 |
E |
d 2 w 2 |
z |
2 |
dV |
1 |
0 |
dw |
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
dx |
2 |
|
|
|
|
dV |
||||||||||||
|
|
|
|
|
|
|
|
|
2 V |
|
|
|
|
|
|
|
|
2 V |
dx |
|
(1.10.3) |
||||||
|
|
|
|
|
|
|
|
|
|
|
1 l |
|
|
|
|
|
|
|
|
|
1 l |
|
dw 2 |
|
|||
|
|
|
|
|
|
|
|
EJ w |
2 |
dx |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 0 |
N0 |
dx, |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 0 |
|
|
|
|
|
|
|
|
|
dx |
|
|
||||
где N0 – продольное усилие в прямом стержне. |
|
||||||||||||||||||||||||||
|
|
|
Окончательно имеем вариационную постановку задачи ус- |
||||||||||||||||||||||||
тойчивости стержня ( Э) 0 плюс граничные условия. |
|||||||||||||||||||||||||||
|
|
|
Для |
получения |
постановки краевой |
задачи |
устойчивости |
||||||||||||||||||||
в виде дифференциального уравнения проварьируем функционалЭ по w:
l EJw" w" N0 w' w' dx 0. |
(1.10.4) |
0 |
|
66
Первое слагаемое интегрируем дважды по частям, а второе один раз
|
|
l |
EJw" ' w'dx EJw" w' |
|
l0 |
|
|||||||||
|
|
||||||||||||||
|
|
||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
l |
N0 w' wdx N0 w' w |
|
l0 0. |
(1.10.5) |
|||||||||
|
|||||||||||||||
|
|
||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
EJw" w' |
|
l0 EJw" ' w |
|
l0 l EJw" " dx l N0 w' ' w |
(1.10.6) |
||||||||||
|
|
||||||||||||||
|
|
||||||||||||||
|
|
|
0 |
|
|
|
|
0 |
|
||||||
вариация функции на неподвижном контуре равна 0; |
|
||||||||||||||
|
|
|
|
|
|
|
N |
0 |
w' |
|
(1.10.7) |
||||
|
|
l EJw" " |
|
|
' wdx 0 |
||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
– основная лемма вариационного исчисления; |
|
||||||||||||||
w 0 на интервале (0, l), следовательно, |
|
||||||||||||||
|
|
|
EJw" " N0 w' ' 0 |
(1.10.8) |
|||||||||||
– дифференциальное уравнение устойчивости стержня.
1.11. Устойчивость анизотропных пластин
На основе энергетического подхода сформулируем критерий устойчивости пластины.
Основные гипотезы:
1.До нагружения пластина плоская и не описывается соотношениями теории упругости.
2.Изменением размеров пластины до потери устойчивости пренебрегаем.
3. Изгиб пластины (возмущенное состояние) описываем в рамках теории изгиба пластин Тимошенко.
Перемещение произвольной точки пластины в пространстве xyz определяется при изгибе по кинематической модели Тимошенко
67

w w(x, y); |
|
|
|
(x, y); |
(1.11.1) |
u z 1 |
||
|
(x, y), |
|
v z 2 |
|
|
|
|
|
где w – прогиб; 1, 2 |
– угол пово- |
||||
|
|
|
рота нормали. |
|
||||
|
|
|
|
|
Кинематическая модель спра- |
|||
|
|
|
ведлива как для стационарного, так |
|||||
|
|
|
и для возмущенногополя. |
|||||
Рис. 1.19. Схема нагружения |
|
|
Подстановка |
соотношения |
||||
(1.11.1) в геометрические соот- |
||||||||
пластины |
||||||||
|
|
|
ношения позволяет получить для |
|||||
возмущенных деформаций |
|
|
и |
|
|
в энергетическом критерии |
||
|
|
|||||||
|
|
|
||||||
Брайана следующие выражения:
|
|
|
|
x z |
1 |
|
|
|
|
|
|
|
w 2 |
|
||||||
|
|
|
|
|
x |
|
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
y z |
|
|
|
|
|
|
2 |
x |
|
|
||||||
|
|
|
|
|
y |
|
|
|
|
|
|
1 |
w |
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
z 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
y |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
0 |
|
(1.11.2) |
||||||||
|
|
|
xy z |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
y |
x |
|
|
w w |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
xz |
w 1 |
|
|
|
|
|
|
x y |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
yz |
w |
2 |
|
|
|
|
|
|
|
0 |
|
|
||||
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В учитываем только прогиб w.
Распишем выражение для приращения полной энергии для ортотропной пластины (x, y – оси ортотропии):
|
1 |
|
|
1 |
|
2 |
|
2 |
|
2 |
2 1 2 |
|
|
|
|
|
|
||||||||
Э |
2 |
С11 |
z |
x |
|
|
С22 z |
y |
|
2С12 z |
x y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
68
|
1 |
|
2 |
|
1 |
|
2 |
|
2 |
|
w |
|
2 |
|
w |
|
2 |
|
|
|
|
|
|
|
|
||||||||||||
|
2 |
С66 z |
|
|
|
|
|
|
|
С55 |
y |
2 |
|
С44 |
y |
2 |
|
dV |
|
y |
x |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
1
V 2
0 |
|
w |
2 |
|
1 |
0 |
w |
2 |
|
|
|
|
||
|
|
0 |
w w |
(1.11.3) |
||||||||||
x |
|
x |
|
|
2 |
y |
y |
|
xy |
x |
y |
dV. |
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Неизвестные функции w, 1 , 2 и не зависят от z, что позволя-
ет провести интегрирование по координате z с пределами h2 ,
где h толщина пластины, и перейти к интегралам по срединной поверхности S.
|
|
|
|
|
1 |
|
|
|
1 |
|
2 |
|
|
2 |
|
2 |
1 2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Э(w, 1 , 2 ) |
2 |
11 |
x |
|
|
22 |
y |
|
2 12 x y |
dS |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
1 |
|
|
2 |
|
2 |
|
|
|
w |
|
|
2 |
|
|
w |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2 |
66 |
|
y |
|
x |
|
|
55 |
x |
1 |
|
44 |
y |
2 |
|
dS |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1
S 2
0 |
|
w |
2 |
|
1 |
0 |
|
w |
2 |
|
|
|
|
||
|
|
0 |
w w |
(1.11.4) |
|||||||||||
Nx |
|
x |
|
|
2 |
Ny |
|
y |
|
Sxy |
x |
y |
dS, |
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
|
C |
h3 |
изгибная жесткость; |
A C h мембранная же- |
|
|
|
ij |
ij 12 |
|
ij |
ij |
|
сткость; Nx0 , Ny0 , Nxy0 мембранные усилия в пластине в невозму-
щенном состоянии; ( Э) 0 критерий устойчивости пластины.
Если для вариационного уравнения устойчивости пластины поставить систему уравнений Эйлера – Остроградского, то можно перейти к дифференциальной постановке задачи устойчивости пластины.
Так как подынтегральная функция в функционале Э является квадратичной, относительно неизвестных функций и их частных производных, то уравнения Остроградского будут линейными дифференциальными уравнениями в частных производных.
69
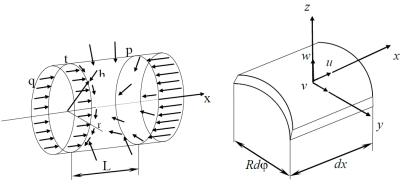
1.12. Устойчивость анизотропных оболочек
Задачу устойчивости тонких упругих оболочек рассмотрим
на примере цилиндрической оболочки (рис. 1.20). |
|
|||||||||||
Рассмотрим |
деформирование |
цилиндрической |
оболочки |
|||||||||
в рамках модели |
Тимошенко |
для |
оболочки |
малой |
кривизны |
|||||||
(то есть пологой оболочки). |
|
|
|
|
|
|
|
|
||||
Компоненты деформации срединной поверхности (мембран- |
||||||||||||
ной деформации) (рис. 1.21) |
|
|
|
|
|
|
|
|
||||
e |
u , e |
y |
|
|
w , e |
xy |
|
u |
. |
(1.12.1) |
||
|
|
|
||||||||||
x |
x |
|
R |
R |
|
|
R |
x |
|
|||
|
|
|
|
|
|
|
||||||
Рис. 1.20. Схема нагружения |
|
|
Рис. 1.21. Элемент оболочки |
|||||||||||||||
оболочки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Углы поворота нормали: |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
xy |
|
w |
, yz |
|
w |
. |
|
|
|
|
(1.12.2) |
|||
|
|
|
|
x |
R |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Компоненты изгибной деформации (изменение кривизны |
||||||||||||||||||
срединной поверхности) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
x |
|
2 w |
, |
y |
|
|
2 w |
, |
xy |
|
1 2 w |
. |
(1.12.3) |
||||
|
|
|
|
|
|
|||||||||||||
x2 |
R2 2 |
R x y |
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
70